
Реферат по теме магистерской работы
- 1.Актуальность темы работы
- 2.Цели и задачи, планируемые практические результаты
- 3.Собственные результаты
- 3.1.Виртуальный стенд по исследованию двухконтурной системы подчинённого регулирования скорости электропривода постоянного тока
- 3.2.Виртуальный стенд для исследования системы векторного управления асинхронным двигателем
- 4.Выводы
- 5.Список использованной литературы
1. Актуальность темы работы
Актуальность работы обеспечивается необходимостью внедрения новых методов и средств в учебный процесс с целью повышения качества подготовки специалистов-электромехаников, особенно в условиях дистанционного и заочного обучения.
Основной особенностью высшего технического образования является необходимость в организации и проведении эффективного лабораторного практикума по профессионально-ориентированным и специальным дисциплинам. Эта необходимость обусловила создание виртуального лабораторного комплекса, который соответствует реальному физическому лабораторному стенду [1]. Один из наиболее подходящих программных пакетов для разработки таких виртуальных стендов — программный пакет LabVIEW, имеющий весьма удобный пользовательский интерфейс и мощные средства графического программирования. LabVIEW (Laboratory Virtual Instrument Engineering Workbench) позволяет разрабатывать прикладное программное обеспечение для организации взаимодействия с измерительной и управляющей аппаратурой, сбора, обработки и отображения информации и результатов расчетов, а также моделирования как отдельных объектов, так и автоматизированных систем в целом [2].
2. Цели и задачи, планируемые практические результаты
С учётом преимуществ математического моделирования при помощи пакета LabVІEW была поставлена задача создания виртуальной лаборатории по исследованию типовых систем электропривода, которая позволяет проводить всестороннее исследование вопросов теории электропривода и систем управления электроприводами, что является целесообразным с методической точки зрения [3].
-
Цели и задачи работы сводятся к следующим:
- • Создание виртуальных моделей простейших устройств;
- • Разработка концепции создания виртуальной модели стендов по исследованию систем электропривода;
- • Изучение средств моделирования систем программного пакета LabVIEW;
- • Исследование рабочих и аварийных режимов работы систем электропривода с помощью виртуальных стендов.
-
Планируемыми практическими результатами являются виртуальные стенды по исследованию следующих систем электропривода:
- • Система подчинённого регулирования скорости электропривода постоянного тока;
- • Система векторного управления скоростью асинхронного двигателя;
- • Система векторного управления скоростью синхронного двигателя с постоянными магнитами.
3. Собственные результаты
При разработке виртуальных стендов был применён опыт моделирования систем электропривода при помощи программы Simulink, который был перенесен в LabVIEW с учётом особенностей этого пакета и в частности его библиотеки Control Design & Simulation. Основные особенности разработки виртуальных лабораторных стендов состоят в сохранении функциональных свойств конкретного лабораторного оборудования, которое применяется в лабораториях, применительно ко всем элементам управления и защиты, которые входят в стенд. Это позволяет применять виртуальные стенды, во-первых, для предварительного изучения студентами устройства и последовательности работы с оборудованием перед переходом к практической части на реальном оборудовании, во-вторых, как методический инструмент при дистанционном обучении [3].
3.1. Виртуальный стенд по исследованию двухконтурной системы подчинённого регулирования скорости электропривода постоянного тока
Исследуемая структурная схема электропривода приведена на рис. 1. Регуляторы тока и скорости настраиваются в стенде, поэтому вид их передаточных функций WРС(p) и WРТ(p) на структурной схеме не показан. Точно также не показан вид передаточных функций обратных связей по току WТ(p) и по скорости WС(p). Задание на вход системы регулирования скорости может быть подано скачком или через задатчик интенсивности.

Рисунок 1 — Исследуемая структурная схема электропривода
-
В состав стенда входят:
- Приборная панель (ПП).
- Наборное поле (НП).
- Исследуемая М1 и нагрузочная М2 машины.
- Реверсивный тиристорный преобразователь типа БТУ-3601, установленный в шкафу типа «Кедр-84» и реверсивный тиристорный преобразователь типа ЭТ6, установленный рядом со стендом.
- Модуль питания системы управления.
- Ячейки датчиков и операционных усилителей.
- Коммутационная аппаратура.
Внешний вид стенда приведен на рис. 2. В качестве элементной базы для построения системы управления приняты датчики тока типа ЯФУ-0145, стабилизатор напряжения ЯФУ-0153, используемые в преобразователях КТЭУ. В лаборатории разработана типовая ячейка операционных усилителей, на которой расположены три усилителя типа К140УД6. Соответствующие входы и выходы этих операционных усилителей выведены на наборное поле.
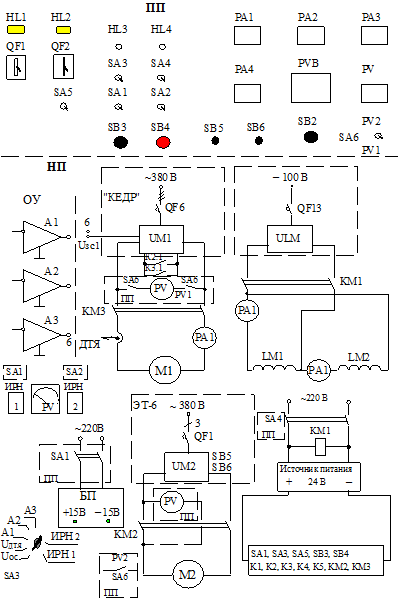
Рисунок 2 — Внешний вид лабораторного стенда
На приборной панели (ПП) расположена коммутирующая аппаратура — автоматические выключатели QF1, QF2, тумблеры SA1…SA6, кнопки SB3…SB6, регистрирующие приборы PA1…PA4, PV, PVB. Кнопка SB2 применяется для расширения шкалы таховольтметра PVB.
Для управления системой регулирования и реализации требуемых передаточных функций разработано наборное поле. На наборном поле (НП) расположены выводы трех операционных усилителей А1...А3, по два резистора на их входах, резисторы, конденсаторы и стабилитроны в каналах обратных связей усилителей; выход датчика тока якоря исследуемой машины Uдтя; выводы задатчика интенсивности ЗИ; потенциометры источников регулируемого напряжения ИРН1 и ИРН2, подключаемые тумблерами SA1, SA2; выход делителя напряжения, подключенного на выход тахогенератора; галетный переключатель SA3, с помощью которого вольтметр PV наборного поля подключается к контрольным точкам наборного поля. Требуемая структурная схема управления коммутируется с помощью скоб и, в случае необходимости, — проводниками. На наборном поле показаны упрощенная схема силовой части электропривода и релейно-контакторная схема управления — РКСУ. С помощью наборного поля осуществляется: проверка работы элементов схемы управления, набор необходимой структурной схемы управления электроприводом, съём сигналов для осциллографирования в характерных точках схемы, подачи напряжения задания на вход системы управления электроприводом и реверса этого задания.
В установке предусмотрена защита от обрыва поля двигателя — исследуемая и нагрузочная машины подключаются к тиристорным преобразователям только при исправной цепи возбуждения машин. Защита осуществляется с помощью реле обрыва поля КА1, разрешающего работу контакторов, подключающих машины к преобразователям [4].
Внешний вид передней панели виртуального стенда, разработанного в среде пакета LabVIEW, представлен на рис. 3 (на виртуальных осциллографах и приборах стенда отражены значения и графики, полученные в результате выполнения одного сеанса моделирования штатного режима работы). Виртуальный стенд сохраняет функциональность основных элементов реального стенда, и предоставляет широкие возможности исследования штатных и аварийных режимов работы системы, таких как последовательная настройка контуров системы, оценка статических и динамических свойств электропривода при разных параметрах регуляторов, обрыв сигналов обратных связей, других каналов передачи воздействий и др.. [5].
Рисунок 3 — Внешний вид передней панели виртуального стенда.
Анимация: 7 кадров, 7 циклов повторения, 140 КБ
3.2. Виртуальный стенд для исследования системы векторного управления асинхронным двигателем
Функциональная схема системы векторного управления с косвенной ориентацией по вектору потокосцепления ротора представлена на рис. 4. Принцип управления заключается в формировании диаграммы изменения фазных напряжений АД с помощью АИН с ШИМ в функции напряжений управления Uуd и Uуq, задаваемых в ортогональной системе координат d, q, ориентированной по вектору потокосцепления ротора ΨR. Для последовательного преобразования напряжений управления к трехфазной системе координат используют преобразователь координат ПК1 (d, q → α, β) и преобразователь фаз ПФ (α, β → A, B, C).
Рисунок 4 — Функциональная схема системы векторного управления АД
Регулирующая часть СУЭП строится в ортогональной системе координат d, q как двухканальная система с двухконтурными подсистемами стабилизации скорости (с регуляторами скорости РС и тока PTq) и потокосцепления ротора АД (с регуляторами потокосцепления РПт и тока РТd). Блок деления БД на выходе РС компенсирует использование операции перемножения при формировании момента АД. Ограничение выходных сигналов регуляторов внешних контуров выполняется на уровнях UЗ.ISd и UЗ.ISq, соответствующих максимально допустимым значениям составляющих ISd и ISq тока статора. Для получения сигналов обратных связей в силовой части электропривода предусматриваются датчики токов (ДТ1, ДТ2) и напряжений (ДН1, ДН2), а также датчик скорости ДС (электромашинный или цифровой), устанавливаемый на валу АД или механизма.
Преобразование сигналов, пропорциональных токам (U0.ISA, U0.ISC) и напряжениям (UUSAB, UUSAC) трехфазной системы к неподвижной ортогональной системе координат α, β осуществляется с помощью вычислителей ортогональных токов (ВОТ) и напряжений (ВОН). Сигналы U0.ISα и U0.ISβ, пропорциональные ортогональным токам ISα и ISβ, подвергаются координатным преобразованиям в ПК2 (α, β → d, q), и участвуют в организации обратных связей по составляющим ISd и ISq тока статора. Выходные сигналы ВОТ и ВОН также обычно принимают участие в формировании наблюдаемого (вычисляемого) значения вектора потокосцепления ротора.
Блок компенсации БК, с учетом наличия параллельных обратных связей по ортогональным составляющим тока статора, потокосцеплению и скорости, предназначен для компенсации влияния внутренних перекрестных обратных связей АД по принципу, аналогичному используемому в электроприводах постоянного тока для компенсации влияния противо-ЭДС. В качестве задающих устройств используют задатчик интенсивности (ЗИ), формирующий задание UЗ.с на контур скорости, и задатчик ослабления поля (ЗОП), формирующий зависимый от сигнала UЗ.с сигнал задания UЗ.п на модуль вектора потокосцепления ротора (или, при отсутствии контура регулирования потокосцепления, сигнал UЗ.ISd задания на потокообразующую составляющую тока статора).
Синтез передаточных функций регуляторов выполняют на основе упрощенной структурной схемы (рис. 5), полученной в предположении об отсутствии взаимного влияния ЭДС вращения и противо-ЭДС двигателя на динамические свойства контуров регулирования тока. Регуляторы тока (ПИ-типа) получаются идентичными, и их настраивают из условия обеспечения приемлемого быстродействия. Регулятор скорости настраивают на модульный (П-регулятор) или симметричный (ПИ-регулятор) оптимум, регулятор потокосцепления (при его наличии) синтезируют ПИ-типа. Для реализации частотно-регулируемого асинхронного электропривода с векторным управлением принципиально возможно использование любого из известных типов преобразователей частоты. Однако наиболее универсальным является электропривод на основе преобразователя частоты с автономным инвертором напряжения (АИН).

Рисунок 5 — Структурная схема системы векторного управления с ориентацией по вектору потокосцепления ротора АД
-
Общий вид лабораторного стенда представлен на рис. 6. В состав стенда входят:
- Приборная панель.
- Асинхронный двигатель с короткозамкнутым ротором.
- Электропривод на базе инвертора напряжения с широтно-импульсной модуляцией.
- Коммутационная аппаратура.
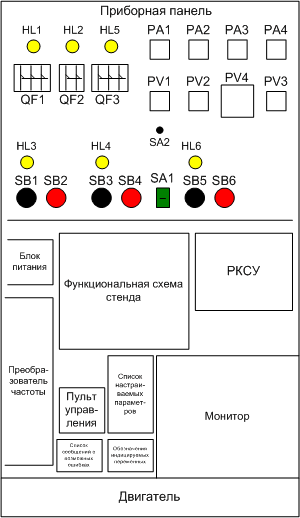
Рисунок 6 — Общий вид лабораторного стенда
-
Электропривод включает следующие функциональные блоки:
- Силовая часть, которая включает в себя входной фильтр, выпрямитель, звено постоянного тока с клампером для сброса энергии, получаемой от двигателя при его работе в генераторных режимах, инвертор, а также датчики выходных токов инвертора и напряжения звена постоянного тока.
- Управляющий контроллер, в задачи которого входит получение задания на отработку скорости/момента, расчет алгоритма векторного управления АД, расчет векторной ШИМ, выдача импульсов управления ключами инвертора, а также управление ключом клампера, опрос сигналов обратных связей по току и скорости, реализация всех защитных функций, а также общее управление всей системой.
- Схемы согласования сигналов между управляющей и силовой частями, которые, кроме согласования уровней сигналов, должны обеспечивать гальваническую развязку силовых и управляющих цепей, что придает более высокую помехозащищенность системе управления, а также предотвращает выход со строя системы управления при аварийных ситуациях в силовой части.
- Датчик сети, основное назначение которого — слежение за питающей сетью с целью заблаговременного выявления потенциально опасных режимов работы питающей сети, приводящих к аварии силовой части электропривода. К таким режимам, в частности, относятся превышение напряжения сети допустимого уровня, перекос фаз, пропадание одной из фаз, кратковременное пропадание напряжения, и др..
- Интерфейс пользователя, к которому относятся: сигналы дискретного и аналогового ввода/вывода, пульт управления, обеспечивающий ввод параметров в систему, вывод информации о состоянии системы, значениях переменных, а также сигнализацию об ошибках, сбоях либо аварийных ситуациях в системе.
- Источник питания асинхронного электропривода, к которому предъявляются высокие требования в части устойчивости работы при нарушении режимов работы питающей сети.
В качестве датчика скорости в лабораторной установке используется импульсный датчик, выполненный в сочетании с устройством распознавания направления вращения. Преобразователь частоты выполнен по традиционной схеме трехзвенного ПЧ с транзисторным инвертором с ШИМ [6].
Данный реальный стенд на данном этапе имеет ограниченные возможности (в части нагружения исследуемого двигателя, исследования аварийных режимов, возможностей программы, обеспечивающей визуализацию переходных процессов, и др.). Поэтому виртуальный стенд разрабатывался с целью сохранения идентичности процессов в штатных режимах, расширения возможностей виртуального стенда в областях исследования аварийных режимов, вариантов виртуального нагружения двигателя, расширения возможности визуализации процессов и др..
Внешний вид передней панели виртуального стенда, разработанного в среде пакета LabVIEW, представлен на рис.7 (на виртуальных осциллографах и приборах стенда отражены значения и графики, полученные в результате выполнения моделирования произвольного штатного режима работы).
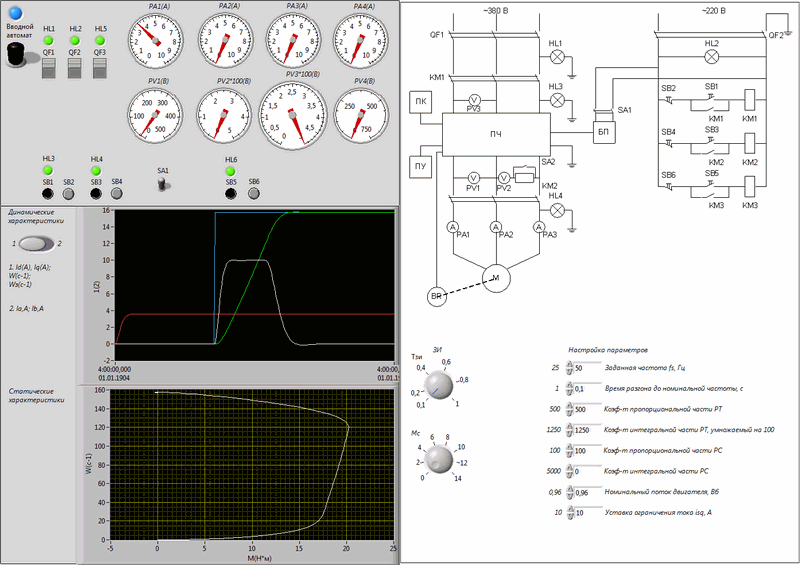
Рисунок 7 — Внешний вид передней панели виртуального стенда
Виртуальный стенд имеет свойства, которые и планировалось обеспечить на этапе постановки цели его разработки, сохраняет функциональность основных элементов реального стенда. В сравнении с реальным стендом предоставляет гораздо более широкие возможности исследования штатных и аварийных режимов работы системы электропривода. К типовым задачам относятся последовательная настройка контуров системы регулирования, визуализация любых координат электропривода с векторным управлением, оценка статических и динамических процессов в штатных и аварийных режимах и др.. Это позволяет использовать его для отработки методики работы с реальным оборудованием, а также для исследовательских целей [7].
4. Выводы
-
На данном этапе разработаны два следующих виртуальных стенда в среде LabVIEW:
- • Виртуальный стенд по исследованию двухконтурной системы подчинённого регулирования скорости электропривода постоянного тока;
- • Виртуальный стенд для исследования системы векторного управления асинхронным двигателем.
Как и планировалось, полученные виртуальные стенды сохраняют функциональность реальных лабораторных установок, но более технологичны в плане исследования широкой гаммы режимов работы систем электропривода. Важно отметить, что в настоящее время данные виртуальные стенды находятся в стадии непрерывного совершенствования.
5. Список использованной литературы
- Евдокимов Ю.К., Кирсанов А.Ю. Организация типовой дистанционной автоматизированной лаборатории с использованием LabVIEW-технологий в техническом вузе. Сборник трудов Международной научно-практической конференции «Образовательные, научные и инженерные приложения в среде LabVIEW и технологии National Instruments». Москва, Россия. 14-15 ноября, 2003. — 15-17 c.
- Н.А.Виноградова, Я.И.Листратов, Е.В.Свиридов. Разработка прикладного программного обеспечения в среде LabVIEW: Учебное пособие — М.: Издательство МЭИ, 2005. — 49 с.
- Є.Ю. Голубцова, М.В. Гамаєва, Г.С. Чекавський. Застосування програмного пакету LabVIEW для дослідження систем електропривода. Електротехнічні та електромеханічні системи: Матеріали XVI Всеукраїнської студен. наук.-техн. конф., м. Севастополь, 18-20 квітня 2011 / М-во освіти і науки, молоді та спорту України, Севастоп. нац. тех. ун-т; наук. ред. О.М. Дегтярьов — Севастополь: СевНТУ, 2011. — 176 с., с. 41-42
- Исследование двухконтурной системы подчиненного регулирования. Инструкция к лабораторной работе по курсу «Системы управления электроприводами» (для студентов специальности «Электромеханические системы автоматизации и электропривод»). — Донецк: ДонГТУ, 1997. — 13 с.
- Голубцова Е. Ю., Чекавский Г. С.. Виртуальный стенд по исследованию двухконтурной системы подчинённого регулирования скорости электропривода постоянного тока в среде LabVIEW. Вісник кафедри «Електротехніка» за підсумками наукової діяльності студентів. — Донецьк, ДонНТУ, 2011 — 181 с., с. 25-26
- Исследование характеристик асинхронного двигателя при векторном управлении с косвенной ориентацией по вектору потокосцепления ротора. Инструкция к лабораторной работе по курсу «Системы векторного управления» (для студентов специальности «Электромеханические системы автоматизации и электропривод») / Cост.: Чекавский Г.С.. — Донецк: ДонНТУ, 2008. — 20 с.
- Голубцова Е. Ю., Чекавский Г. С.. Виртуальный стенд для исследования системы векторного управления асинхронным двигателем. Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць ХІ науково-технічної конференції аспірантів та студентів в м. Донецьку 17-20 травня 2011 р. — Донецьк, ДонНТУ, 2011. — 306 с., с. 251-253