


Колесников Роман Владимирович
Факультет электротехническийКафедра электропривод и автоматизация промышленых установок
Специальность «Електромеханические системы автоматизации и электропривод»
Способы демпфирования колебаний в электромеханических системах
Научный руководитель: д.т.н., професор, зав. кафедры ЭАПУ Толочко Ольга ИвановнаРеферат по теме выпускной работы
АктуальностьЦели и задачи
Пассивные способы гашения колебаний
Система модального управления двухмассовым электромеханическим объектом (ДЭМО)
Активные способы гашения колебаний
Пьезоактюаторы
Направление дальнейших исследований
Список литературы
Актуальность
Одной из главных особенностей большинства механизмов является то, что приводное устройство и исполнительный орган связаны не жёстко, а с помощью упругих связей, что в свою очередь является основной причиной возникновения колебаний. Последние приводят к износу системы, а при резонансе возрастают и могут привести к аварийным ситуациям. Поэтому необходимо применять специальные меры по демпфированию колебаний.
Цели и задачи
Цель работы – исследовать различные методы демпфирования колебаний в электромеханических системах. Для достижения поставленной цели необходимо решить следующие задачи:
- разработать математическую модель с упругими связями;
- исследовать динамические свойства двухмассовой электромеханической системы методом математического моделирования;
- исследовать различные способы демпфирования колебаний;
- сравнить различные методы.
Пассивные способы гашения колебаний
Система модального управления двухмассовым электромеханическим объектом (ДЭМО)
Одним из пассивных способов демпфирования колебаний является модальное управление, рассмотренное на примере двухмассового электромеханического объекта.
Cтруктурные схемы системы ТП (тиристорный преобразователь) –ДЭМО с модальным регулятором (МР) полного порядка изображены на рис.1.
Коэффициенты обратных связей по переменным состояния в о.е. и в а.е. связаны между собою соотношениями

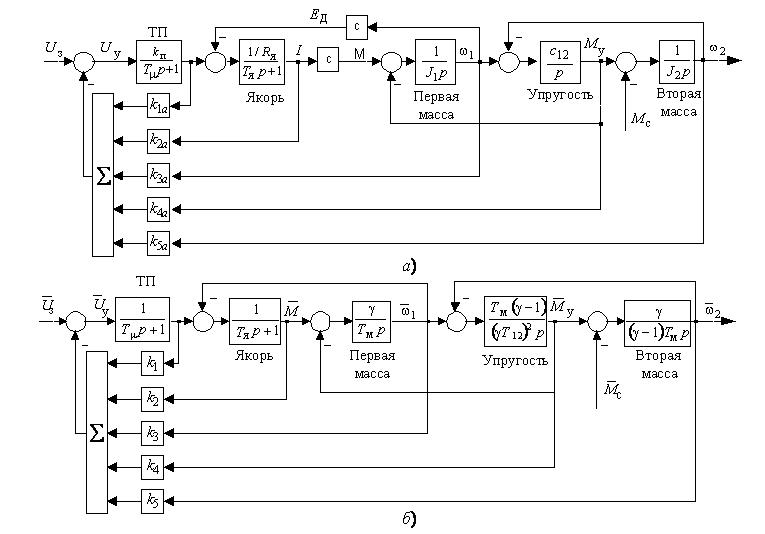
Рисунок 1 – Структурная схема системы ТП-ДЭМО, замкнутой по полному вектору состояния а) а.е.; б) о.е.
Основные передаточные функции (ПФ) системы рис. 1, б по управляющему воздействию имеют вид:
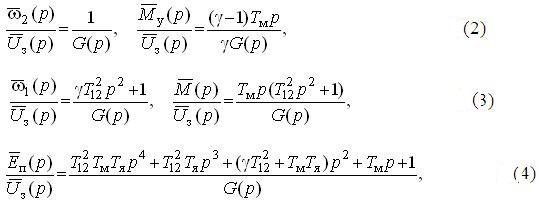
где
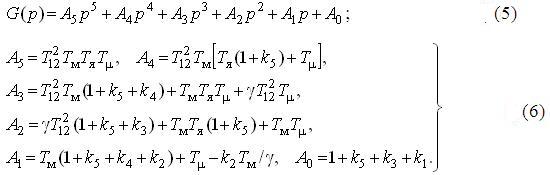
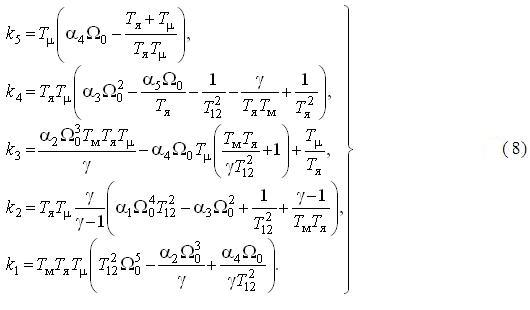
Приравнивая между собою сходственные коэффициенты желаемого

и действительного (5) характеристических полиномов (ХП), получим выражения для коэффициентов МР :
Из ПФ (2)-(4) видно, что при отсутствии установившиеся значения скоростей сосредоточенных масс и ЭДС преобразователя равны
– коэффициент усиления системы модальног управления (СМУ) по управляющему воздействию.
Если на входе системы рис. 1 установить задатчик интенсивности (ЗИ) с передаточной функцией (ПФ)
то поведение электромагнитного и упругого моментов при отработке управляющего действия определяется передаточными функциями
где

которые после нормирования времени по величине, обратной среднему геометрическому корню (СГК)  , будут иметь вид
, будут иметь вид
Из выражений (11), (12) видно, что в переходных процессах по управляющему действием упругий момент изменяется пропорционально желаемой переходной функции СМУ
а электромагнитный момент состоит из суммы сигналов, пропорциональных желаемой переходной функции СМУ и ее второй производной по времени:

Основным требованием к системе автоматического управления (САУ) ДЭМО является устранение колебаний упругого момента. Поэтому желаемому ХП должна соответствовать переходная функция с маленьким перерегулированием или даже без него. Из известных стандартных форм в наибольшей мере этим требованиям отвечают: 1) полином Ньютона; 2) полином, сконструированный методом двойных пропорций; 3) полином, который обеспечивает “оптимальное затухание” переходной функции; 4) полином Бесселя; 5) полином, сконструированный по заданному 5-процентному перерегулированию переходной функции с расположением полюсов на окружности радиуса  ; 6) предложенный Бургиным полином, который он называет “оптимальным” для ДЭМС. Соответственно с этой нумерацией будем называть перечисленные стандартные полиномы СП1, …, СП6. Коэффициенты этих СП приведены в табл. 1.
; 6) предложенный Бургиным полином, который он называет “оптимальным” для ДЭМС. Соответственно с этой нумерацией будем называть перечисленные стандартные полиномы СП1, …, СП6. Коэффициенты этих СП приведены в табл. 1.
Понятно, что список пригодных для оптимизации ДЭМО полиномов можно расширить, но и вышеперечисленных достаточно для того, чтобы проследить тенденции их использования.
Переходные функции  (13) и вторые производные от переходных функций
(13) и вторые производные от переходных функций  для систем с выбранными для исследования желаемыми ХП изображены на рис. 2.
для систем с выбранными для исследования желаемыми ХП изображены на рис. 2.
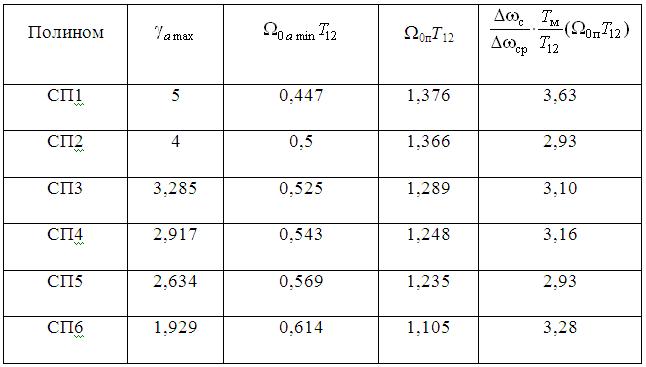
Таблица 1 - Коэффициенты характеристических полиномов СП1-СП6 и некоторые показатели соответствующих им переходных функций

Из анализа графиков рис. 2 и формул (14), (15) видно, что при разгоне СМУ от ЗИ в момент времени, приблизительно равный времени достижения функцией максимального значения, могут наблюдаться значительные броски электромагнитного момента, что подтверждается графиками рис. 3.
Величины этих бросков с учетом указанного выше приближения могут быть рассчитаны по формуле

где  – относительное время достижения второй производной от желаемой переходной функции максимального значения
– относительное время достижения второй производной от желаемой переходной функции максимального значения  .
.
Задавшись максимально-допустимым значением этого броска, можно определить и максимально-допустимый, из условия его ограничения, СГК характеристического полинома, нормированный по частоте упругих колебаний ДЭМС:

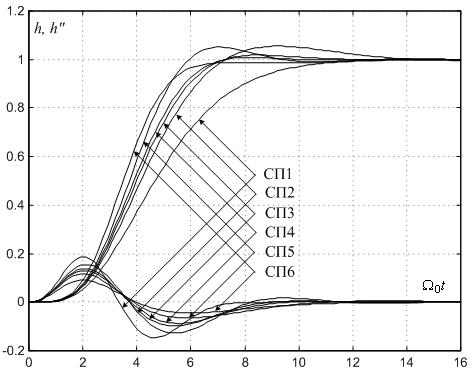
Рисунок 2 – Переходные функции, соответствующие стандартным ХП табл. 1, и их вторые производные
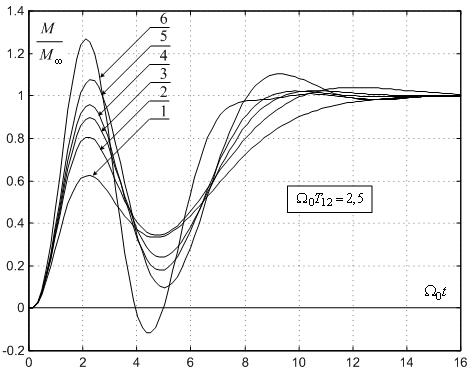
Рисунок 3 – Графики изменения электромагнитного момента при разгоне системы от ЗИ
Точность формул (16), (17) возрастает с увеличением параметров  и
и  соответственно. При небольших значениях погрешность этой формулы становится больше из-за того, что время достижения первого максимума сигналом M(t) перестает совпадать со временем достижения первого максимума функцией
соответственно. При небольших значениях погрешность этой формулы становится больше из-за того, что время достижения первого максимума сигналом M(t) перестает совпадать со временем достижения первого максимума функцией  .
.
Для облегчения синтеза рассматриваемой СМУ в табл. 1 приведены также максимальные значения вторых производных от переходных функций, времена, в которые эти максимумы достигаются, и значения переходных функций в эти моменты времени.
Анализ графиков рис. 2, 3 и данных табл. 1 показывает, что в формулах (16) и (17) в первом приближении можно пренебречь величиной переходной функции  в момент достижения ее второй производной максимума. При таком упрощении оказывается, что бросок момента увеличивается прямо пропорционально квадрату СГК характеристического полинома.
в момент достижения ее второй производной максимума. При таком упрощении оказывается, что бросок момента увеличивается прямо пропорционально квадрату СГК характеристического полинома.
Из графиков рис. 4 видно, что изменение СГК характеристического полинома влияет не только на быстродействие системы  , но и на поведение электромагнитного момента, а именно: с повышением значительно возрастает амплитуда колебаний электромагнитного момента, за счет чего, по сути, и достигается рост быстродействия.
, но и на поведение электромагнитного момента, а именно: с повышением значительно возрастает амплитуда колебаний электромагнитного момента, за счет чего, по сути, и достигается рост быстродействия.
Еще одним параметром, который следует оценить при исследовании переходных процессов по управляющему воздействию, является добротность по скорости (скоростная ошибка), то есть установившееся время запаздывания tз скорости первой и второй масс от линейного сигнала, который изменяется с заданным ускорением. В общем случае этот параметр равняется разности между коэффициентами при первых степенях оператора Лапласа в знаменателе и числителе передаточной функции, нормированной по коэффициентам при свободных членах. Для рассматриваемой системы

Значения параметров  и
и  , приведены в табл. 2. Из их сравнения видно, что показатель добротности по скорости является наилучшим при применении ХП, синтезированного методом двойных пропорций (СП2), так как он обеспечивает при одинаковом броске электромагнитного момента минимальное отставание скоростей первой и второй масс от желаемого закона их изменения.
, приведены в табл. 2. Из их сравнения видно, что показатель добротности по скорости является наилучшим при применении ХП, синтезированного методом двойных пропорций (СП2), так как он обеспечивает при одинаковом броске электромагнитного момента минимальное отставание скоростей первой и второй масс от желаемого закона их изменения.
Прежде, чем окончательно выбрать ХП системы, необходимо проанализировать ее динамические и статические свойства при отработке основного возмущающего воздействия, то есть при набросе нагрузки.
Для обоснования этого положения на рис. 5 приведены переходные функции системы по возмущающему воздействию с такими же значениями относительного СГК, как и при получении переходных процессов, изображенных на рис. 4.
Из рис. 5 видно, что при удовлетворительном характере переходных функций упругого момента и скорости механизма электромагнитный момент и скорость двигателя имеют на начальном участке переходного процесса слишком большую колебательность, которая возрастает с повышением параметра  .
.
Передаточная функция СМУ от статического момента до электромагнитного момента, выраженная через коэффициенты желаемого ХП имеет вид:

Из нее видно, что найти аналитическое выражение для величины первого броска момента в этом случае без знания аналитического выражения для переходной функции и его первой и второй производных невозможно. Это обусловлено тем, что, в отличие от переходных процессов при разгоне привода от ЗИ, даже приближенное время достижения этим броском максимального значения остается неизвестным.
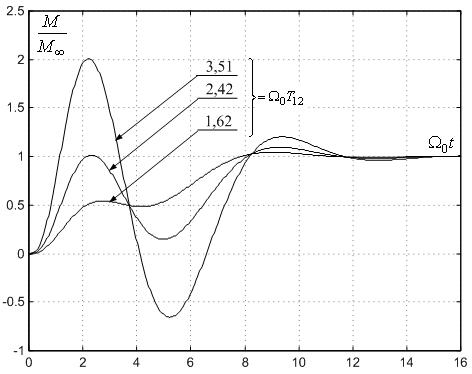
Рисунок 4 – Переходные процессы при разгоне системы с характеристическим полиномом СП4 от ЗИ при значениях СГК,рассчитанных по формуле (17) при =[2 1 0.5]
Таблица 2 - СГК и добротности по скорости в системе рис. 3 с ХП СП1-СП6 при заданных значениях первых бросков электромагнитного момента
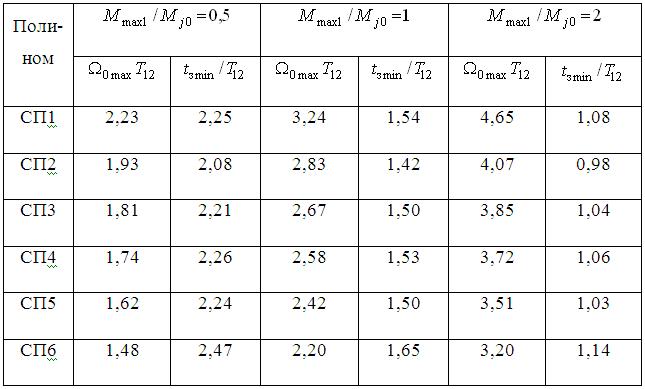
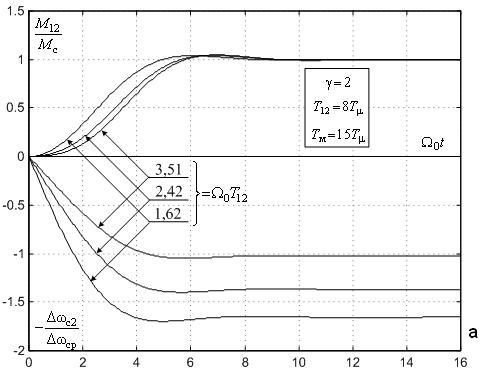
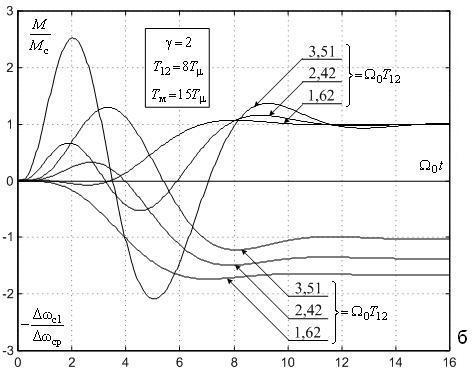
Рисунок 5 – Переходные процессы при набросе нагрузки при значениях СГК, обеспечивающих при разгоне от ЗИ =[2 1 0.5]: а – упругий момент и скорость механизма; б – электромагнитный момент и скорость двигателя
Из (19) видно также, что качество переходных процессов в СМУ при наброске нагрузки существенно зависит от коэффициента соотношения масс. Можно показать, что при малых значениях  наблюдается значительный отрицательный бросок тока, а при возрастании и увеличиваются первый положительный бросок тока и положительный бросок скорости двигателя.
наблюдается значительный отрицательный бросок тока, а при возрастании и увеличиваются первый положительный бросок тока и положительный бросок скорости двигателя.
Таким образом, при выборе СГК по формуле (17), во-первых, не следует задаваться очень большим значением броска электромагнитного момента (целесообразно выбирать его равным или даже меньшим установившегося значения), во-вторых, в любом случае необходимо проверить качество переходных процессов тока и скорости двигателя при отработке возмущающего воздействия.
Важным показателем качества систем электропривода является статическая просадка скорости  при набросе нагрузки. Проанализируем зависимость этого показателя от величины СГК.
при набросе нагрузки. Проанализируем зависимость этого показателя от величины СГК.
Из структурной схемы рис. 1 можно определить

После подстановки в формулу (20) выражений коэффициентов обратных связей МР через коэффициенты ХП  (8) она приобретет вид
(8) она приобретет вид

Решением биквадратного уравнения

получаемого из формулы (21) при  , получаем значения СГК, которые обеспечивают астатизм системы по возмущению:
, получаем значения СГК, которые обеспечивают астатизм системы по возмущению:

Из выражения под внутренним корнем формулы (23) следует возможность достижения астатизма по возмущению только при выполнении условия

Граничному параметру  соответствует граничная частота
соответствует граничная частота

При < система будет иметь два значения  и
и  , при которых обеспечивается условие отсутствия ошибки по скорости. При < < ошибка будет положительной, то есть при набросе нагрузки установившаяся скорость привода будет возрастать, что в большинстве случаев недопустимо. Можно показать, что частоту также нельзя рекомендовать для использования, так как, в сравнении с применением характеристической частоты , переходные процессы не только замедляются, но и становятся более колебательными.
, при которых обеспечивается условие отсутствия ошибки по скорости. При < < ошибка будет положительной, то есть при набросе нагрузки установившаяся скорость привода будет возрастать, что в большинстве случаев недопустимо. Можно показать, что частоту также нельзя рекомендовать для использования, так как, в сравнении с применением характеристической частоты , переходные процессы не только замедляются, но и становятся более колебательными.
На рис. 30 изображены графики переходных процессов при набросе нагрузки при выборе СГК по формуле (23) при использовании СП4. Максимальное значение коэффициента на этом рисунке (=2.63) соответствует его граничному значению . Представленные переходные процессы имеют вполне удовлетворительный характер, но при малых значениях они отличаются повышенным перерегулированием по электромагнитному моменту и повышенным динамическим падением скорости, а при больших , как показывает анализ значений СГК, становятся слишком медленными.
Таким образом, частоту можно считать минимально возможным значением СГК в системах модального управления ДЭМО, для которых выполняется условие (24), при стабильности параметров ОР. Вариация параметров ДЭМО может преобразовать параметрически астатическую СМУ в систему с положительным статизмом, что недопустимо.
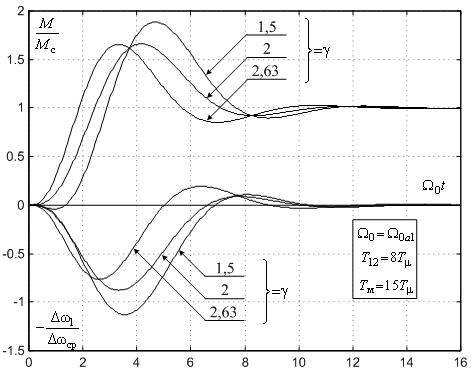
Рисунок 6 – Переходные процессы при набросе нагрузки при выборе СГК из условия обеспечения нулевой статической ошибки по скорости: а – упругий момент и скорость механизма; б – электромагнитный момент и скорость двигателя
Если параметрический астатизм не достижим ( > ) или не желателен, то следует искать другой способ выбора СГК. Решение этой задачи может быть найдено в процессе анализа статических свойств рассматриваемой системы.
Для оценки статической точности СМУ воспользуемся параметром

полученным из формулы (21).
Семейство графиков зависимостей этого параметра от СГК, отнесенного к частоте упругих колебаний ДЭМО  , для разных коэффициентов в системе с СП4 изображено на рис. 6.7 (жирной линией выделены кривые, полученные при = и =1).
, для разных коэффициентов в системе с СП4 изображено на рис. 6.7 (жирной линией выделены кривые, полученные при = и =1).
Все графики на рис. 7 пересекаются в одной точке. Это говорит о том, что существует СГК, при котором значение статической просадки скорости набросе нагрузки не зависит от .
Такой СГК существует для любых ХП. Его можно найти подстановкой в формулу (23) значения =1:

На графиках рис. 7 частоты  отмечены крестиками, точки достижения параметрического астатизма – кружочками, а частоты, обеспечивающие заданные броски электромагнитного момента при разгоне от ЗИ, – квадратиками.
отмечены крестиками, точки достижения параметрического астатизма – кружочками, а частоты, обеспечивающие заданные броски электромагнитного момента при разгоне от ЗИ, – квадратиками.
Из сопоставления этих графиков и данных, приведенных в табл. 1-3, видно, что предложенные в данной работе канонические полиномы СП2 и СП5 имеют наименьший статизм по нагрузке при одинаковых первых бросках электромагнитного момента в пуско-тормозных режимах (см. точки пересечения пунктирных вертикалей с кривыми) и при частоте  (см. последнюю колонку табл. 1).
(см. последнюю колонку табл. 1).
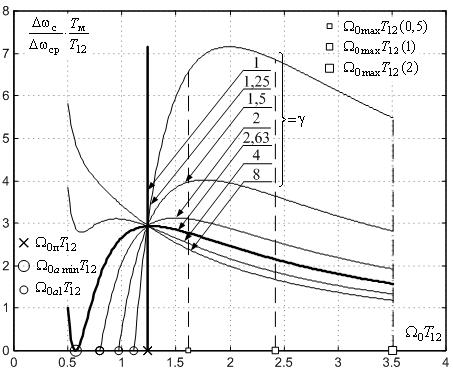
Рисунок 7 – Графики зависимости статизма по нагрузке от СГК в СМУ рис. 1 с характеристическим полиномом СП4 для разных коэффициентов соотношения масс
Таблица 3 - Характерные параметры системы рис. 1 при использовании в ней в качестве ХП канонических полиномов СП1, …, СП6
На рис. 8 изображены графики переходных процессов в исследуемой системе с СГК, рассчитанным по формуле (28) при набросе нагрузки. Для этих графиков характерны небольшие перерегулирования по электромагнитным и упругим моментам, а также отсутствие положительных бросков электромагнитного момента.
Для рассматриваемых ХП частота удовлетворяет неравенству

т.е. с этой частотой первый бросок электромагнитного момента при разгоне от ЗИ будет практически отсутствовать. Учитывая статические и динамические свойства системы рис. 1 при =, указанную частоту можно рекомендовать в качестве первого приближения СГК характеристического полинома при синтезе СМУ.
Если система управления ДЭМО должна быть астатической по нагрузке, то, в условиях нестабильности параметров ОР, ее следует дополнить контуром регулирования скорости второй массы с интегральным регулятором, как это показано на рис. 9. Для повышения быстродейсвия такой системы в пуско-тормозных режимах в нее целесообразно включить узел упреждающей коррекции, реализующий принцип комбинированного управления по задающему воздействию.
Переходные процессы в системе рис. 9, демонстрирующие эффективность упреждающей коррекции и преимущества использования метода двойных пропорций при формировании характеристического полинома по сравнению с использованием полинома Баттерворта, показаны на рис. 10.
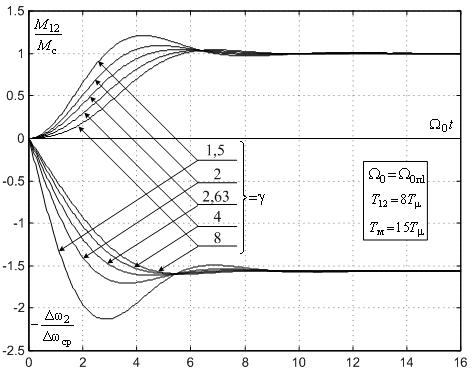
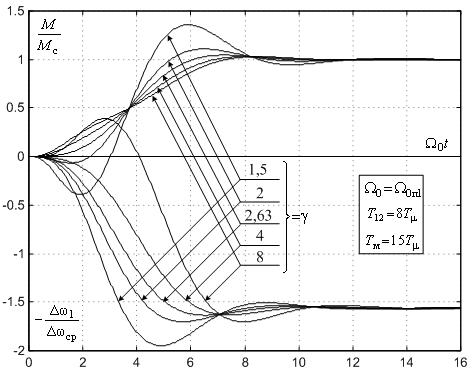
Рисунок 8 – Переходные процессы при набросе нагрузки в системе рис. 1 с характеристическим полиномом СП4 с СГК, рассчитанным по формуле (27)
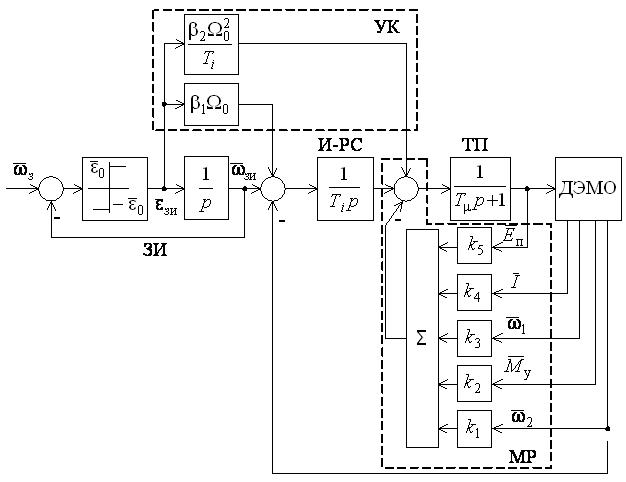
Рисунок 9 – Структурная схема астатической системы модального управления с упреждающей коррекцией по каналу задания
Графики получены при  .
.
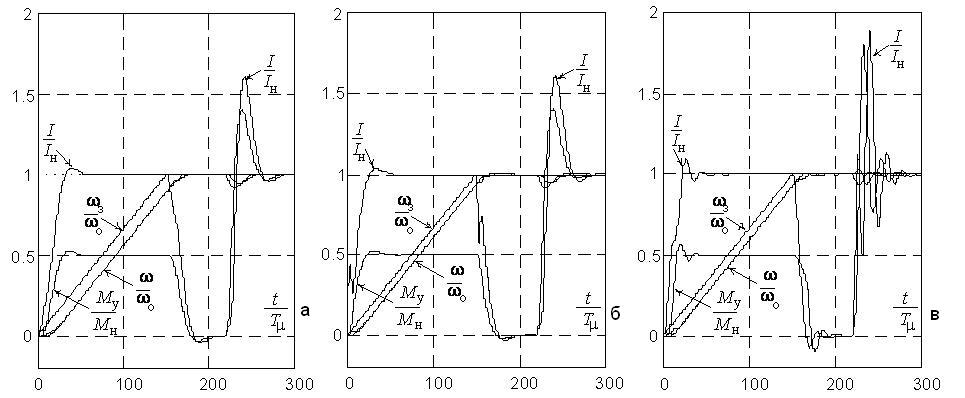
Рисунок 10 – Перехлдные процессы в статической СМУ двухмассовым электромеханическим объектом: а - ХП синтезирован методом двойных пропорций; б - ХП синтезировани методом двойных пропорций; ХП является полиномом Баттерворда
На основании выполненных в данном подразделе исследований можно сделать следующие выводы:
1) при разгоне СМУ от ЗИ в графиках M(t) могут наблюдаться значительные положительные броски, амплитуда которых, в первом приближении, прямо пропорциональна квадрату величины , и максимальному значению второй производной  от переходной функции, соответствующей выбранному ХП; графики электромагнитного момента в этом режиме не зависят от коэффициента соотношения масс ;
от переходной функции, соответствующей выбранному ХП; графики электромагнитного момента в этом режиме не зависят от коэффициента соотношения масс ;
2) для ДЭМО, работающих от ЗИ, с малыми и (или) медленно изменяющимися моментами статического сопротивления, СГК можно выбирать из условия ограничения первого броска электромагнитного момента в пуско-тормозных режимах по полученной формуле (17), исходные данные для которой при использовании в качестве ХП полиномов СП1-СП6 приведены в табл. 1;
3) при одинаковых бросках момента наименьшую скоростную ошибку при разгоне привода от ЗИ обеспечивает характеристический полином СП2, сконструированный методом двойных пропорций (см. табл. 2 и формулу 18);
4) при наброске нагрузки характер изменения электромагнитного момента M(t) зависит не только от СГК, но и от коэффициента соотношения масс: наиболее благоприятные переходные процессы наблюдаются при 2<<4; при <2 возрастает перерегулирование по моменту и динамическое падение скорости двигателя; при >4 появляются положительные броски скорости первой массы;
5) при скачкообразном изменении нагрузки броски электромагнитного момента чаще всего превышают аналогичные броски в пуско-тормозных режимах;
7) при < СМУ можно сделать параметрически астатической по нагрузке, рассчитывая ; при этом значения , рассчитанные по формуле (23), можно считать наименьшим допустимым значением СГК при стабильных параметрах ДЭМО;
8) для каждого ХП существует значение СГК, обеспечивающее независимость статической просадки скорости при набросе нагрузки от величины ; оно рассчитывается по полученной формуле (27) и может быть принято за рекомендуемое в первом приближении значение СГК для приводов, работающих при резко изменяющихся нагрузках;
Активные способы гашения колебаний
Пьезоактюаторы
Одним из активных способов демпфирования колебаний в электромеханических системах является использование пьезоактюаторов.
Первое коммерческое использование обратного пьезоэффекта произошло во время Первой мировой войны, когда были созданы первые сонары. В 1940 году ученые обнаружили пьезоэлектрические свойства у титаната бария. В начале 70-х годов 20 века были созданы пьезоактюаторы, получившие коммерческий спрос.
Внешние механические силы, воздействуя в определенных направлениях на пьезоэлектрический кристалл, вызывают в нем не только механические напряжения и деформации (как во всяком твердом теле), но и электрическую поляризацию и, следовательно, появление на его поверхностях связанных электрических зарядов разных знаков. При изменении направления механических сил на противоположное становятся противоположными направление поляризации и знаки зарядов. Это явление называют прямым пьезоэффектом. Он используется при создании пьезоактюаторов, направленных на подавление механических колебаний.
Пьезоэффект обратим. При воздействии на пьезоэлектрик, например кристалл, электрического поля соответствующего направления в нем возникают механические напряжения и деформации. При изменении направления электрического поля на противоположное соответственно изменяются на противоположное направления напряжений и деформаций. Это явление получило название обратного пьезоэффекта. Он используется при создании высокоточных систем позиционного привода, в которых пьезоактюатор выполняет роль двигателя, осуществляя нано- и микроперемещения с высокой степенью точности.
Для описания преобразования пьезоматериалами электрического сигнала в механическую реакцию в начале 80-х годов прошлого века был введен термин «пьезомеханика».
Пьезоактюаторы преобразовывают электрические сигналы (напряжения или заряда) в механическое перемещение или силу. Диапазон рабочих частот пьезоакюаторов варьируется от статического состояния до половины резонансной частоты механической системы. Следует отметить, что есть отдельный класс актюаторов, которые работают именно на резонансных частотах, известные как ультразвуковые преобразователи. Они преобразуют электрическую энергию в механическую.
В зависимости от используемого пьезоэлектрического материала пьезоактюаторы могут быть пьезокристаллическими (на базе монокристаллов) и пьезокерамическими (на базе поликристаллов – пьезокерамики). На практике пьезокерамические актюаторы нашли более широкое применение.
Рисунок 11 – Структура пьезоактюатора
Направление дальнейших исследований
Следующим этапом исследований данной магистерской работы будет изучение способов и эффективности гашения упругих колебаний в электромеханических системах при помощи пьезоактюаторов. Кроме математического моделирования, предполагается выполнение экспериментальных исследований на оборудовании, которое будет передано на кафедру ЭАПУ Версальским университетом (Париж).
Список литературы
- Толочко О. И. Анализ и синтез электромеханических систем с наблюдателями состояния: Дис. докт. техн. наук: 05.09.03. – Донецк, 2004. – 457 с.
- Панич А.Е. Пьезокерамические актюаторы. Учебное пособие. Ростов-на-Дону, 2008.
- Dierk Schroder. Elektrishe Antriebe – Regelung von Antriebssystemen. 2009 Springer – Verlag Berlin Heidelberg
- Борцов Ю.А. Соколовский Г. Г. Автоматизированный электропривод с упругими связями. Санкт-Петербург,1992.
- Julien Ducarne. Modelisation et optimisation de dispositifs non-lineaires d’amortissement de structures par systemes piezoelectriques commutes. Conservatoire National des Arts et Metiers, le 27 Mars 2009.
- Казаков В., Климашин В., Никифоров В., Сафронов А., Чернов В. Многослойные пьезоэлектрические актюаторы и особенности их применения. Компоненты и технологии №6, 2007.
- Климашин В., Никифоров В., Сафронов А., Парфенов Б., Ярошевич В. Пьезокерамические пакетные и моноблочные актюаторы. Компоненты и технологии №6, 2002.
Резюме | Биография | Ссылки | Библиотека | Отчет о поиске | Индивидуальное задание