


Колесников Роман Володимирович
Факультет електротехнічнийКафедра електропривод та автоматизація промислових установок
Спеціальність "Електромеханічні системи автоматизації та електропривод"
Засоби демпфування коливнь в електромеханічних системах
Науковий керівник: д.т.н., професор, зав. кафедри ЕАПУ Толочко Ольга ІванівнаРеферат по темі випускної роботи
АктуальністьМета та задачі
Пасивні засоби гасіння коливань
Система модального керування двомассовим електромеханічним об’єктом (ДЕМО)
Активні засоби гашення коливань
Пьезоактюатори
Направлення дальнійших досліджень
Перелік літератури
Актуальність
Одною з головних особливостей більшості механізмів є те, що приводний пристрій та виконавчий орган зв’язані не жорстко, а за допомогою пружного зв’язку, що в свою чергу є головною причиною виникнення коливань. Останні призводять до зношення системи, а під час резонансу підвищуються та можуть призвести до аварійних ситуацій. Тому необхідно застосовувати спеціальні міри по демпфуванню коливань.
Мета та задачі
Мета роботи – дослідити різноманітні методи демпфування коливань в електромеханічних системах. Для досягнення поставленої мети необхідно вирішити наступні задачі:
- розробити математичну модель з пружним зв’язком;
- дослідити динамічні властивості двомассової електромеханічної системи методом математичного моделювання;
- дослідити різноманітні засоби демпфування коливань;
- порівняти різні методи.
Пасивні засоби гасіння коливань
Система модального керування двомассовим електромеханічним об’єктом (ДЕМО)
Одним з пасивних способів демпфування коливань є модальне керування, розглянуте на прикладі двомассового електромеханічного об’єкту.
Структурні схеми системи ТП (тиристорний перетворювач) –ДЕМО з модальним регулятором (МР) повного порядку зображені на рис. 1.
Коефіціенти зворотніх зв’язків по мінливим стану в в.о. та в а.о. зв’язані між собою співвідношеннями

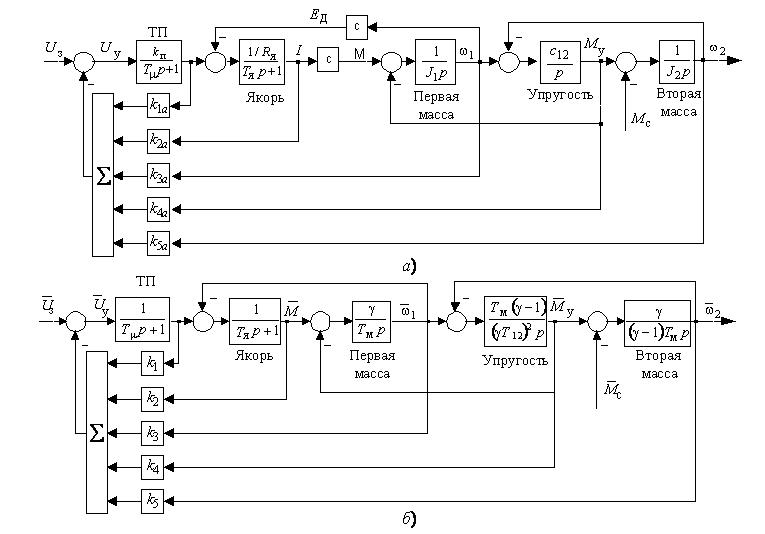
Рисунок 1 – Структурна схема системи ТП-ДЕМО, замкненої по повному вектору стану а) а.о.; б) в.о.
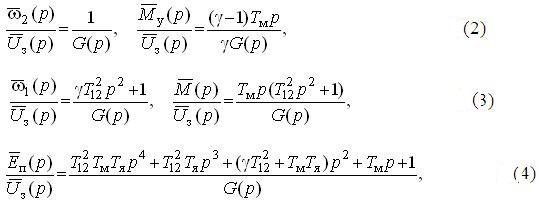
Основні ПФ системи мал. 1, б за керуючим впливом мають вигляд:
де
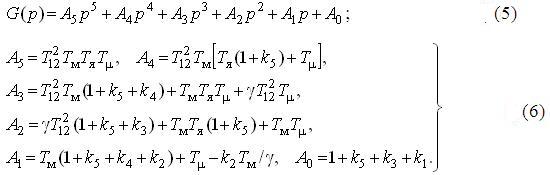
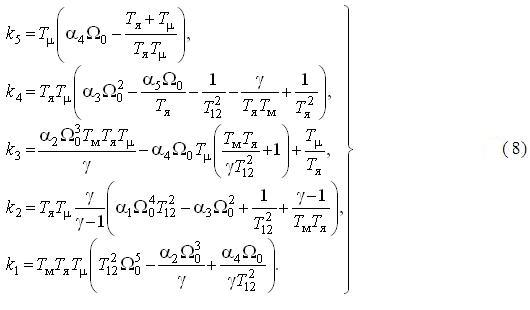
Прирівнюючи між собою подібні коефіцієнти бажаємого

та дійсного (5) характеристичних поліномів (ХП), отримаємо вираз для коефіцієнтів МР :
З ПФ (2)-(4) видно, що за відсутністю встановлені значення швидкостей зосереджених мас та ЕДС перетворювача рівні
– коефіцієнт підсилення системи модального керування (СМК) за керуючим впливом.
Якщо на виході системи рис. 1 встановити задатчик інтенсивності (ЗІ) з передавальною функцією (ПФ)
то поведінка електромагнітного та пружного моментів під час обробки керуючої дії визначається передавальними функціями
де

які післе нормування часу за величиною, зворотньою середньому геометричному корню (СГК)  , будуть мати вигляд
, будуть мати вигляд
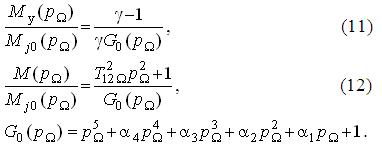
З виразів (11), (12) видно, що в перехідних процесах за керуючою дією пружній момент змінюється пропорційно бажаної перехідної функції СМК
а електромагнітний момент складається з суми сигналів, пропорційних бажаної перехідної функції СМК та її другої похідної за часом:

Головною вимогою до системи автоматичного керування (САК) ДЕМО є усунення коливань пружнього моменту. Тому бажаному ХП повинна відповідати ПФ з маленьким перерегулюванням або навіть без него. З відомих стандартних форм найбільше цим вимогам відповідають: 1) поліном Ньютона; 2) поліном, сконструйованний методом подвійних пропорцій; 3) поліном, який забезпечує “оптимальне затухання” перехідної функції; 4) поліном Бесселя; 5) поліном, сконструйований по заданому 5-процентному перерегулюванню перехідної функції з расположенням полюсів на окружності радіусом  ; 6) припущений Бургіним поліном, котрий він називає “оптимальним” для ДЕМС. Відповідно з цією нумерацією будемо називати перераховані стандартні поліноми СП1, …, СП6. Коэфіцієнти цих СП приведені в табл.1.
; 6) припущений Бургіним поліном, котрий він називає “оптимальним” для ДЕМС. Відповідно з цією нумерацією будемо називати перераховані стандартні поліноми СП1, …, СП6. Коэфіцієнти цих СП приведені в табл.1.
Понятно, що список пригодних для оптимізації ДЕМО поліномів можно розширити, але й вищеназваних достатньо для того, щоб прослідкувати тенденції їх використання.
Перехідні функції  (13) та другі похідні від перехідних функцій
(13) та другі похідні від перехідних функцій  для систем с выбранными для исследования желаемыми ХП изображены на рис. 2.
для систем с выбранными для исследования желаемыми ХП изображены на рис. 2.
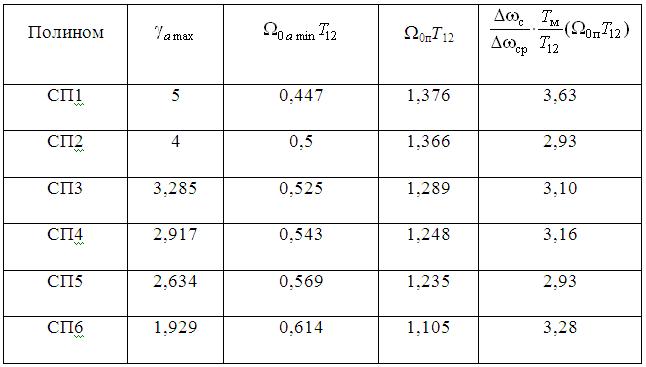
Таблиця 1 - Коефіцієнти характеристичних поліномів СП1-СП6 та деякі показники відповідних їм перехідних функцій

З аналізу графиків рис.2 та формул (14), (15) видно, що під час розгону СМК від ЗІ в момент часу, приблизно дорівнює часу досягнення функцією максимального значення, можуть спостерігатися значні кидки електромагнітного моменту, що підтверджується графіками рис. 3.
Величини цих кидків з урахуванням вказанного вище зближення можуть бути розраховані за формулою

де  – відносний час досягнення другої похідної від бажанної перехідної функції максимального значення
– відносний час досягнення другої похідної від бажанної перехідної функції максимального значення  .
.
Задавшись максимально-допустимим значенням цього кидка, можно визначити й максимально-допустимий, з условія його обмеження, СГК характеристичного полінома, нормований за частотою пружніх коливань ДЕМС:

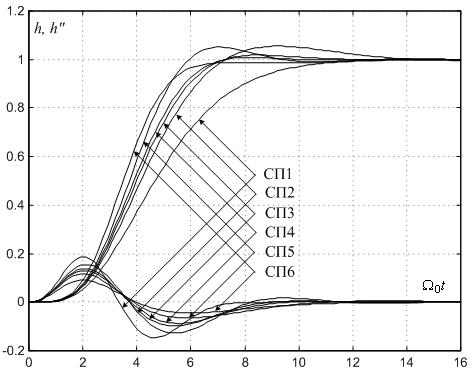
Рисунок 2 – Перехідні функції, відповідаючі стандартним ХП табл. 1, та їх другі похідні
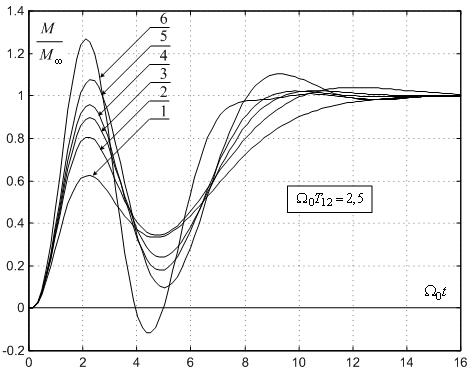
Рисунок 3 – Графіки змінення електромагнітного моменту під час розгону системи від ЗІ
Точність формул (16), (17) підвищується під час збільшення параметрів  та
та  відповідно. За невеликих значеннях похибка цієї формули стає больше тому, що час досягнення першого максимума сигналом M(t) перестає співпадати з часом досягнення першого максимума функцією
відповідно. За невеликих значеннях похибка цієї формули стає больше тому, що час досягнення першого максимума сигналом M(t) перестає співпадати з часом досягнення першого максимума функцією  .
.
Для полегшення синтезу розглядаємої СМК в табл. 1 приведені також максимальні значення других похідних від перехідних функцій, часи, в які ці максимуми досягаються, та значення перехідних функцій в ці моменти часу.
Аналіз графиків рис. 2, 3 та даних табл.1 показує, що в формулах (16) і (17) в першому наближенні можно знехтувати величиною перехідної функції  в момент досягнення його другої похідної максимума. За таким спрощенням виявляється, що кидок моменту збільшується прямо пропорційно квадрату СГК характеристичного поліному.
в момент досягнення його другої похідної максимума. За таким спрощенням виявляється, що кидок моменту збільшується прямо пропорційно квадрату СГК характеристичного поліному.
Із графіків мал. 4 видно, що змінення СГК характеристичного поліному впливає не тільки на швидкодію системи  , але й на поведінку електромагнітного моменту, а саме: з підвищенням значно збільшується амплітуда коливань електромагнітного моменту, за рахунок чого, по суті, й досягається ріст швидкодії.
, але й на поведінку електромагнітного моменту, а саме: з підвищенням значно збільшується амплітуда коливань електромагнітного моменту, за рахунок чого, по суті, й досягається ріст швидкодії.
Ще одним параметром, який слід оцінити під час дослідження перехідних процесів по керуючому впливу, є добротність за швидкістю (швидкісна похибка), тобто встановлений час запізненя tз швидкості першої та другої мас від лінійного сигналу, який змінюється із заданим прискоренням. В загальному випадку цей параметр дорівнює разності між коефіцієнтами за перших ступенях оператора Лапласа в знаменник та чисельник передавальної функції, нормованої за коефіцієнтами за вілні члени. Для розгляненої системи

Значення параметрів  та
та  , приведені в табл.2. З їх порівняння видно, що показник добротності по швидкості є найкращим під застосування ХП, синтезованого методом подвійних пропорцій (СП2), так як він забезпечує під час одинакового кидка електромагнітного моменту мінімальне відставання швидкостей першої та другої мас від бажаного закону їх змінення.
, приведені в табл.2. З їх порівняння видно, що показник добротності по швидкості є найкращим під застосування ХП, синтезованого методом подвійних пропорцій (СП2), так як він забезпечує під час одинакового кидка електромагнітного моменту мінімальне відставання швидкостей першої та другої мас від бажаного закону їх змінення.
Перш, як остаточно вибрати ХП системи, необхідно проаналізувати її динамічні та статичні властивості при обробці основного збурюючого впливу, тобто під час набросу навантаження.
Для обгрунтування цього положення на рис.5 приведені перехідні функції системи за збурюючим впливом з таким же значенням відносного СГК, як й при отриманні перехідних процесів, зображених на рис.4.
З рис.5 видно, що під час задовільного характеру перехідні функції пружнього моменту та швидкості механізму електромагнітного моменту та швидкість двигуна мають на начальній дільниці перехідного процессу дуже велику коливальність, яка збільшується з підвищенням параметру  .
.
Передавальна функція СМК від статичного моменту до електромагнітного моменту, яка виражена через коефіцієнти бажаного ХП міє вигляд:

З неї видно, що знайти аналітичний вираз для першого кидку моменту в цьому випадку без знання аналітичного виразу для перехідної функції та його першої та другої похідних неможливо. Це зумовлено тим, що, на відміну від перехідних процесів під час разгону приводу від ЗІ, навіть наближений час досягнення цим кидком максимального значення залишається невідомим.
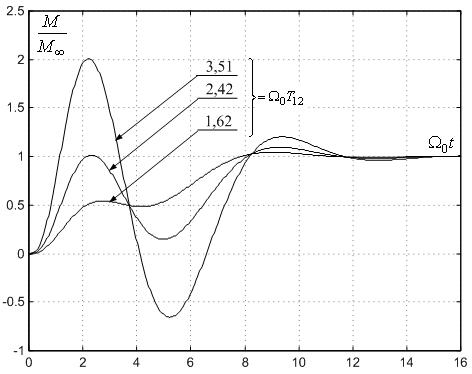
Рисунок 4 – Перехідні процесси під час разгону системи з характеристичним поліномом СП4 від ЗІ, де значення СГК,розраховані за формулою (17) де =[2 1 0.5]
Таблица 2 - СГК та добротності по швидкості в системі рис. 3 з ХП СП1-СП6, де задані значення перших кидків електромагнітного моменту
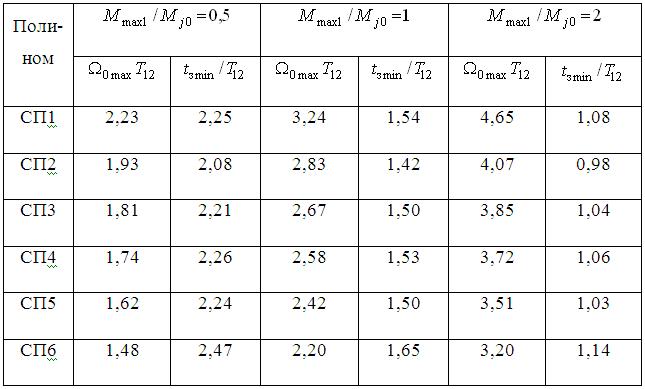
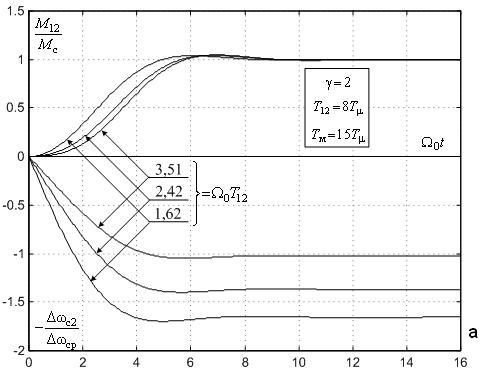
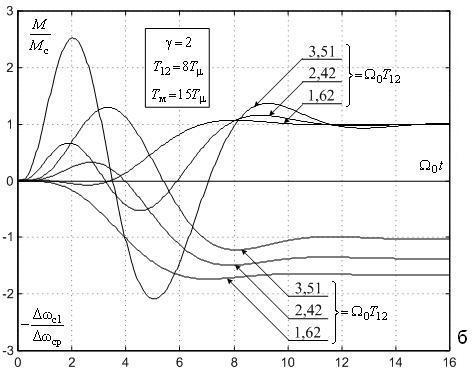
Рисунок 5 – Перехідні процеси при набросі навантаження при значеннях СГК, забезпечуючих при разгоні від ЗІ =[2 1 0.5]: а – пружній момент та швидкість механізму; б – электромагнітний момент та швидкість двигуна
З (19) видно також, що якість перехідних процесів в СМК при набросі навантаження суттєво залежить від коефіціента співвідношення мас. Можно показати, що при малих значеннях  спостерігається значний негативний кидок струму, а під зростання та збільшується перший позитивний кидок струму та позитивний кидок швидкості двигуна.
спостерігається значний негативний кидок струму, а під зростання та збільшується перший позитивний кидок струму та позитивний кидок швидкості двигуна.
Таким чином, під час вибору СГК за формулою (17), по-перше, не варто задаватися дуже великим значенням кидка електромагнітного моменту (доцільно вибрати його равним або навіть меньшим встановленого значення), по-друге, в любому випадку необхідно перевірити якість перехідних процесів струму та швидкості двигуна під час обробкие збурюючего впливу.
Важливим показником якості систем електропривода є статична просадка швидкості  під час набросу навантаження. Проаналізуємо залежність цього показника від величини СГК.
під час набросу навантаження. Проаналізуємо залежність цього показника від величини СГК.
З структурної схеми рис. 1 можно визначити

Після подстановки в формулу (20) виразів коефіцієнтів зворотніх зв’язків МР через коефіцієнти ХП  (8) вона набуває виду
(8) вона набуває виду

Рішення біквадратного рівняння

отримуємо з формули (21) при  , отримуємо значення СГК, які забезпечують астатизм системи за збуренням:
, отримуємо значення СГК, які забезпечують астатизм системи за збуренням:

З виразу під внутрішнім корнем формули (23) слідує можливість досягнення астатизму за збуренням тільки при виконанні умов

Граничному параметру  відповідає гранична частота
відповідає гранична частота

При < система буде мати два значення  та
та  , при яких забезпечується умова відсутності похибки за швидкістю. При < < похибка буде позитивною, тобто при набросі навантаження встановлена швидкість приводу буде збільшуватись, що в більшості випадків недопустимо. Можно показати, що частоту також неможна рекомендувати для використання, так як, в порівнянні з застосуванням характеристичної частоти , перехідні процеси не тільки уповільнюються, але й становляться більш коливальними.
, при яких забезпечується умова відсутності похибки за швидкістю. При < < похибка буде позитивною, тобто при набросі навантаження встановлена швидкість приводу буде збільшуватись, що в більшості випадків недопустимо. Можно показати, що частоту також неможна рекомендувати для використання, так як, в порівнянні з застосуванням характеристичної частоти , перехідні процеси не тільки уповільнюються, але й становляться більш коливальними.
На рис. 3 зображені графіки перехідних процесів при набросі навантаження під час вибору СГК за формулою (23) при використанні СП4. Максимальне значення коефіцієнта на цьому рисунку (=2.63) відповідає його граничному значенню . Представлені перехідні процеси мають цілком задовільний характер, але при малих значеннях вони віідрізняються підвищенним перерегулюванням за електромагнітним моментом та підвищеним динамічним падінням швидкості, а при великих , як показує аналіз значень СГК, становляться занадто повілними.
Таким чином, частоту можно рахувати мінімально можливим значенням СГК в системах модального керування ДЕМО, для яких виконується умова (24), при стабільності параметрів ОР. Варіація параметров ДЕМО може преобразувати параметрично астатичну СМК в систему з позитивним статизмом, що недопустимо.
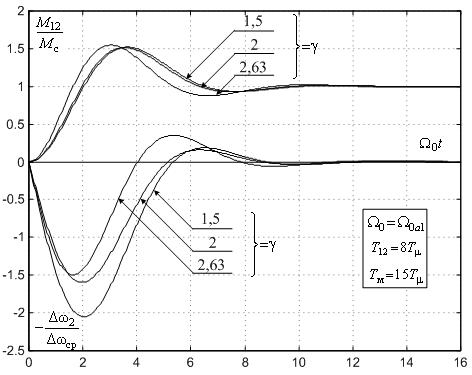
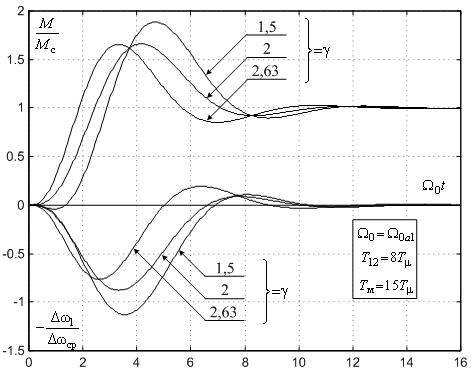
Рисунок 6 – Перехідні процеси при набросі навантаження при виборі СГК з умови забезпечення нульової статичної похибки за швидкістю: а – пружній момент та швидкість механізму; б – електромагнітний момент та швидкість двигуна
Якщо параметричний астатизм не досягаємий ( > ) або не бажаний, то слід шукати інший спосіб вибору СГК. Рішення цієї задачі може быти знайдено в процесі анализу статичних властивостей розглядаються системи.
Для оцінки статичної точності СМК використаємо параметр

отриманим з формули (21).
Сімейство графіків залежностей цього параметру від СГК, віднесеного до частоти пружніх коливань ДЕМО  , для різних коефіцієнтів в системі з СП4 зображено на рис. 7.
, для різних коефіцієнтів в системі з СП4 зображено на рис. 7.
Всі графіки на рис. 7 пересікаються в одній точці. Це говорить про те, що існують СГК, при якому значення статичної просадки швидкості під час набросу навантаження не залежить від .
Такий СГК існує для любих ХП. Його можно знайти подстановкою в формулу (23) значення =1:

На графіках рис. 7 частоти  помічені крестиками, точки досягнення параметричного астатизму – кружочками, а частоти, забезпечуючі заданні кидки електромагнітного моменту при розгоні від ЗІ, – квадратиками.
помічені крестиками, точки досягнення параметричного астатизму – кружочками, а частоти, забезпечуючі заданні кидки електромагнітного моменту при розгоні від ЗІ, – квадратиками.
З зіставлення цих графиків та данних, приведених в табл. 1-3, видно, що припущені в цій роботі каноничні поліноми СП2 и СП5 мають найменьший статизм за навантаженням при однакових перших кидках електромагнітного моменту в пуско-тормозних режимах (див. точки перетинання пунктирних вертикалій з кривими) та при частоті  (див. останню колонку табл. 1).
(див. останню колонку табл. 1).
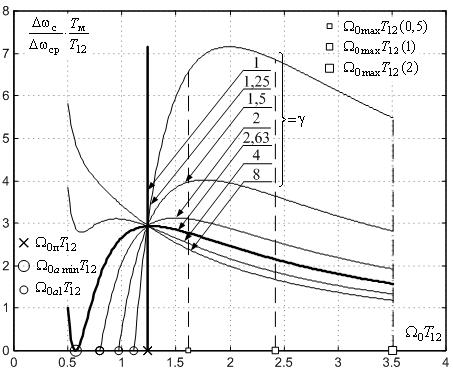
Рисунок 7 – Графіки залежності статизму за навантаженням від СГК в СМК рис. 1 з характеристичним поліномом СП4 для різних коефіцієнтів співвідношення масс
Таблиця 3 - Характерні параметри системи рис. 1 при використанні в ній в якості ХП канонічних поліномів СП1, …, СП6
На рис. 8 зображені графіки перехідних процесів в досліджувальній системі з СГК, розрахованим за формулою (28) при набросі навантаження. Для цих графиків характерні найбільші перерегулювання по електромагнітним та пружнім моментам, а також відсутність позитивних кидків електромагнітного моменту.
Для роздивляємих ХП частота задовільняє нерівності

тобто з цією частотою перший кидок електромагнітного моменту під час разгону від ЗІ буде практично відсутнім. Враховуючи статичне та динамічне властивості системи рис. 1 при =, вказану частоту можно рекомендувати в якості першого наближення СГК характеристичного поліному при синтезі СМК.
Якщо система управління ДЕМО повинна бути астатичною за навантаженням, то, в умовах нестабільності параметрів ОР, її слід доповнити контуром регулювання швидкості другої маси з інтегральним регулятором, як це показано на рис. 9. Для підвищення швидкодії такої системи в пуско-тормозних режимах в неї доцільно включити вузел упереджувальної корекції, реалізуючий принцип комбінованого керування по задающему впливу.
Перехідні процеси в системі рис. 9, демонструючі ефективність упереджувальної корекції та переваги використання методу подвійних пропорцій при формуванні характеристичного поліному в порівнянні з використанням поліному Баттерворта, показані на рис. 10.
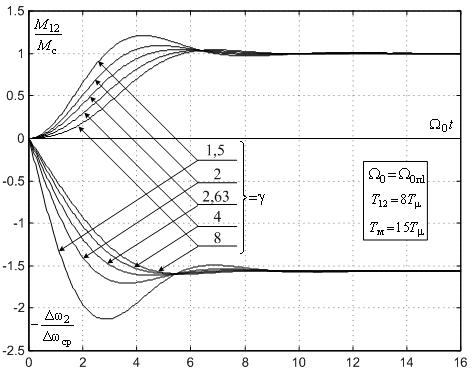
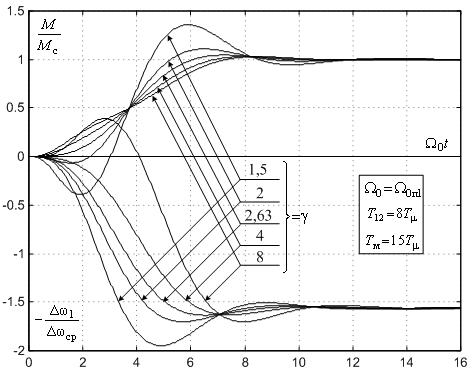
Рисунок 8 – Перехідні процеси при набросі навантаження в системі рис. 1 з характеристичним поліномом СП4 з СГК, розрахованим за формулою (27)
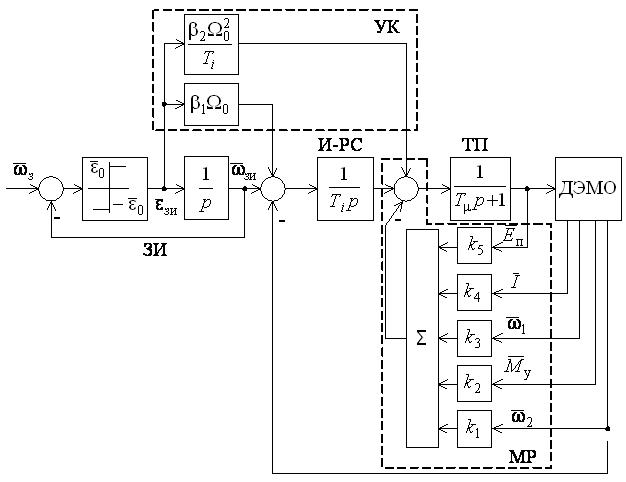
Рисунок 9 – Структурна схема астатичної системи модального керувння з упереджувальною корекцією по каналу задання
Графіки отримані при  .
.
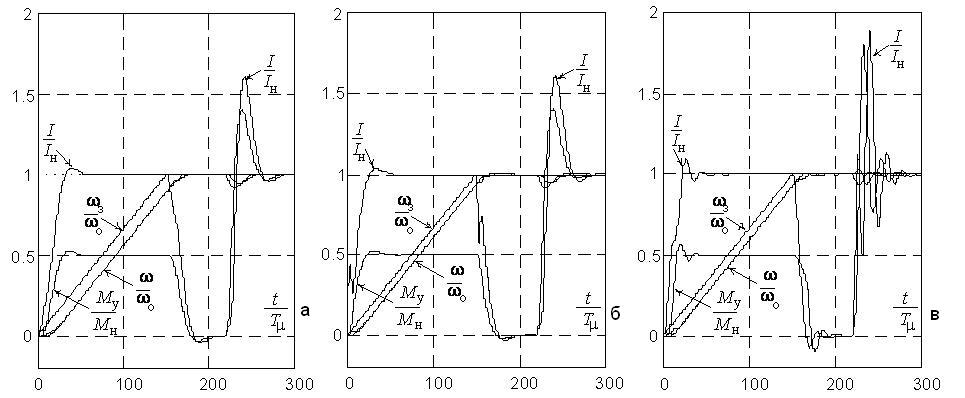
Рисунок 10 – Перехлдные процессы в статической СМУ двухмассовым электромеханическим объектом: а - ХП синтезирован методом двойных пропорций; б - ХП синтезировани методом двойных пропорций; ХП является полиномом Баттерворда
Спераючись на виконані в данному підрозділі дослідження можно зробити слідуючі висновки:
1) при розгон СМК від ЗІ в графіках M(t) можуть спостерігатися значні позитивні кидки, амплітуда яких, в першому приближенні, прямо пропорційна квадрату величини , та максимальному значенню другої похідної  від перехідної функції, відповідній обраному ХП; графіки електромагнітного моменту в цьому режимі не залежать від коефіцієнта співвідношення мас ;
від перехідної функції, відповідній обраному ХП; графіки електромагнітного моменту в цьому режимі не залежать від коефіцієнта співвідношення мас ;
2) для ДЕМО, роботаючих від ЗІ, З малими та (або) повільно змінюючимися моментами статичного опору, СГК можно вибирати з умови обмеження першого кидку електромагнітного моменту в пуско-тормозних режимах по отриманій формулі (17), вихідні данні для якої при використанні в якості ХП поліномів СП1-СП6 приведені в табл. 1;
3) при однакових кидках моменту найменьшу швидкісну похибку при розгоні приводу від ЗІ забезпечує характеристичний поліном СП2, сконструйований методом подвійних пропорцій (див. табл. 2 та формулу 18);
4) при наброскі навантаження характер змінення електромагнітного моменту M(t) залежить не тільки від СГК, але й від коефіцієнта співвідношення мас: найбільш сприятливі перехідні процеси спостерігаються при 2<<4; при <2 підвищується перерегулювання по моменту та динамічне падіння швидкості двигуна; при >4 появляються позитивні кидки швидкості першої маси;
5) при стрибкоподібному зміненні навантаження кидки електромагнітного моменту частіше всього перевищують аналогічні кидки в пуско-тормозних режимах;
7) при < СМК можно зробити параметрично астатичною по навантаженню, рораховуя при цьому значення , розраховані по формулі (23), можно рахувати найменьшим допустимим значенням СГК при стабільних параметрах ДЕМО;
8) для кожного ХП існує значення СГК, яке забезпечує незалежність статичної просадки швидкості при набросі навантаження від величини ; воно розраховується по отриманій формулі (27) та може бути прийнято за рекомендоване в першому зближенні значення СГК для приводів, роботаючих при різко змінюючихся навантаженнях;
Активні засоби гашення коливань
Пьезоактюатори
Одним з активних способів демпфування коливань в електромеханічних системах є використання пьезоактюаторів.
Перше комерційне використання зворотнього пьезоефекту було під час Першої світової війни, коли були створені перші сонари. В 1940 році вчені виявили пьезоелектричні властивості у титаната барія. На початку 70-х років 20 віку були створені пьезоактюатори, які отримали комерційний попит.
Зовнішні механічні сили, впливая в певних направленнях на пьезоелектричний кристал, викликають в ньому не тільки механічні напруги та деформації (як в твердому тілі), але й електричну полярізацію та, слідувательно, появлення на його поверхнях зв'язаних електричних зарядів різних знаків. При зміненні направлення механічних сил на протилежні становляться протилежними направлення полярізації та знаки зарядів. Це явище називають прямим пьезоефектом. Він використовується при створенні пьезоактюаторів, направлених на подавлення механічних коливань.
Пьезоефект може бути зворотнім. При впливі на пьезоелектрик, наприклад кристал, електричного поля відповідного направлення в ньому виникають механічні напруження та деформації. При зміненні направлення електричного поля на протилежне відповідно змінюються направлення напружг та деформацій. Це явище отримало назву зворотнього пьезоефекту. Він використовується при створенні високоточних систем позиційного приводу, в яких пьезоактюатор виконує роль двигуна, здійснюючи нано- та мікропереміщення з високою ступінню точності.
Для опису перетворювання пьезоматеріалами електричного сигналу в механічну реакцію на початку 80-х років прошлого віку був введен термін «пьезомеханіка».
Пьезоактюатори перетворюють електричні сигнали (напруги або заряда) в механічне переміщення або силу. Діапазон рабочих частот пьезоакюаторів варіює від статичного стану до половини резонансної частоти механічної системи. Слід відзначити, що є окремий клас актюаторів, які роботають саме на резонансних частотах, відомі як ультразвукові перетворювачі. Вони перетворюють електричну енергію в механічну.
В залежності від використаємого пьезоелектричного матеріалу пьезоактюатори можуть бути пьезокристалічними (на базі монокристалів) та пьезокерамічними (на базі полікристалів – пьезокераміки). На практиці пьезокерамічні актюатори знайшли більш широке пристосування.
Рисунок 11 – Структура пьезоактюатора
Направлення дальнійших досліджень
Слідуючим етапом досліджень данної магістерської роботи буде вивчення засобів та ефективності гашення пружніх коливань в електромеханічних системах за допомогою пьезоактюаторів. Крім математичного моделювання, припускається виконання експериментальних досліджень на обладнанні, яке буде передано на кафедру ЕАПУ Версальським університетом (Париж).
Перелік літератури
- Толочко О. И. Анализ и синтез электромеханических систем с наблюдателями состояния: Дис. докт. техн. наук: 05.09.03. – Донецк, 2004. – 457 с.
- Панич А.Е. Пьезокерамические актюаторы. Учебное пособие. Ростов-на-Дону, 2008.
- Dierk Schroder. Elektrishe Antriebe – Regelung von Antriebssystemen. 2009 Springer – Verlag Berlin Heidelberg
- Борцов Ю.А. Соколовский Г. Г. Автоматизированный электропривод с упругими связями. Санкт-Петербург,1992.
- Julien Ducarne. Modelisation et optimisation de dispositifs non-lineaires d’amortissement de structures par systemes piezoelectriques commutes. Conservatoire National des Arts et Metiers, le 27 Mars 2009.
- Казаков В., Климашин В., Никифоров В., Сафронов А., Чернов В. Многослойные пьезоэлектрические актюаторы и особенности их применения. Компоненты и технологии №6, 2007.
- Климашин В., Никифоров В., Сафронов А., Парфенов Б., Ярошевич В. Пьезокерамические пакетные и моноблочные актюаторы. Компоненты и технологии №6, 2002.
Резюме | Біографія