Назад в библиотеку
Разработка способа управления инвалидным креслом с электроприводом на базе аппарата нейронных сетейАвторы: Д.А. Ипанов, В.Н. Хоменко, А.А. Мельник АннотацияИпанов Д.А., Хоменко В.Н., Мельник А.А. Разработка способа управления инвалидным креслом с электроприводом на базе аппарата нейронных сетей. У статті розглядаються загальні властивості нейронних мереж, доцільність їх застосування для керування інвалідним кріслом, визначення способу створення нейроконтроллера, який має виконувати задачу компенсації та полегшення впливу особи що супроводжує при керуванні інвалідним кріслом. Теория и методы синтеза нейронных сетей находят свое применение для построения систем управления технологическими и подвижными объектами различного назначения. Нейросети обладают рядом уникальных свойств [1], которые делают их мощным инструментом для создания систем управления: способностью к обучению на примерах и обобщению данных, способностью адаптироваться к изменению свойств объекта управления и внешней среды, пригодностью для синтеза нелинейных регуляторов. Многослойные нейронные сети находят применение и как идентификаторы состояния динамических объектов [2], успешно конкурируя с традиционными линейными и нелинейными идентификаторами. В силу упомянутых свойств такие сети служат универсальным средством построения моделей практически любых нелинейных структур, в том числе и нестационарных. Существует множество способов организации искусственных нейронных сетей, которые могут содержать различное число слоёв нейронов. Нейроны могут быть связаны между собой как внутри отдельных слоёв, так и между слоями. В зависимости от направления передачи сигнала эти связи могут быть прямыми или обратными. Слой нейронов, непосредственно принимающий информацию из внешней среды, называется входным слоем, а слой, передающий информацию во внешнюю среду, – выходным слоем. Остальные слои, если они имеются в сети, называются промежуточными, или скрытыми. В ряде случаев такого функционального распределения слоёв сети не производится, так что входы и выходы могут присоединяться к любым слоям и иметь произвольное число компонент. Структура нейронной сети зависит от той или иной конкретной задачи, которую должна решать сеть. Она может быть однослойной без обратных связей или с обратными связями, двухслойной с прямыми связями, трехслойной с обратными связями и др. Сети с обратными связями называют рекуррентными. В настоящее время, нейронные сети широко применяются при создании контроллеров, для управления инвалидными креслами с электроприводом. Нейроконтроллеры позволяют управлять движением на базе накопленных знаний [3]. В таких нейроконтроллерах на вход поступает информация о переменных состояния системы (механического устройства, двигателей, силовых преобразователей), действующих обобщенных силах и моментах, а также векторы задающих и возмущающих воздействий. Выходом нейронной сети является вектор управляющих сигналов, выдаваемых устройством управления на исполнительные приводы. Целью исследования является определение способа создания нейроконтроллера, способного компенсировать и облегчать воздействие сопровождающих лиц при управлении инвалидным креслом. Принцип работы такого нейроконтроллера заключается в следующем: для приведения в движение кресла-каталки сопровождающим лицом прикладывается некоторое усилие, которое измеряется при помощи тензометрических датчиков, расположенных на ручках управления инвалидным креслом. Далее полученный сигнал, через усилитель сигнала с тензодатчика, подсоединенный к аналоговому входу микроконтроллера, поступает на вход нейронной сети, где в процессе обучения происходит настройка весовых коэффициентов согласно обучаемому алгоритму таким образом, чтобы для каждого входного вектора был получен приемлемый уровень отклонения выходного вектора от целевого. На выходе нейроконтроллера образуется управляющий сигнал, который поступает на электродвигатели кресла-каталки, тем самым обеспечивая желаемый характер движения. Другими словами, выполняется компенсация управляющего воздействия. Как вариант, в случае применения в системе стандартных ПИД-регуляторов, на выходе сети получаем значения соответствующих коэффициентов. Решение поставленной задачи может выполняться на базе рекуррентных нейронных сетей, характерная особенность которых – наличие блоков динамической задержки и обратных связей, что позволяет им обрабатывать динамические модели. К основным недостаткам таких сетей следует отнести низкую скорость обучения [4], основанного на процедуре обратного распространения ошибки, и сложность обеспечения устойчивости, связанную с отсутствием аналитических методов исследования устойчивости нелинейных динамических систем. Преодолеть эти недостатки можно при помощи введённых Г. Егером нейронных эхо-сетей. Архитектура такой сети сходна с рекуррентными нейронными сетями и содержит входной слой, скрытый слой, охваченный обратными связями и называемый также «динамическим резервуаром», а также выходной слой, считывающий информацию из скрытого слоя. 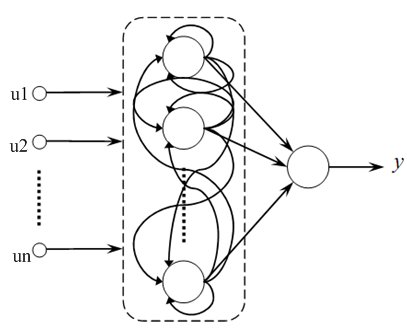
Рисунок 7 – Архитектура нейронной эхо сети Основная особенность нейронных эхо-сетей заключается в том, что настраиваемыми являются только синаптические веса выходного слоя, для обучения которых могут применяться оптимальные по быстродействию адаптивные алгоритмы линейной идентификации. Веса же скрытого слоя сети задаются один раз при инициализации сети и не изменяются в процессе ее функционирования. При подаче на вход такой сети некоторого сигнала он фиксируется во входном слое. Затем производится несколько итераций в скрытом слое сети, пока его выходные сигналы не стабилизируются. При этом в скрытом слое наблюдаются ослабленные по амплитуде образы предыдущих состояний сети, откуда и произошло название «эхо-сеть» (echo-state network). Выходной сигнал сети формируется с помощью считывания выходным слоем информации из скрытого слоя сети. Характерные преимущества применения нейронных эхо-сетей
ВыводыНа основании рассмотренных архитектуры и особенностей нейронных эхо-сетей будет разработан нейроконтроллер для облегчения и компенсации воздействия сопровождающих лиц при управлении инвалидным креслом с электроприводом. Список использованной литературы
|