Назад в библиотеку
Курс систем автоматического регулированияПеревод с французского: Д.А. Ипанов
Источник: Alain Sapin – Swiss Federal Institute of Technology, Electrical Machines Laboratory (LME) auto.polytech.univ-tours.fr/telechargements/ Определение автоматики1. ВведениеНа протяжении нескольких лет, эффективность устройств цифрового моделирования была значительно улучшена. На сегодняшний день возможно детальное моделирование комплексных электрических систем, которые включают в себя несколько типов составляющих, как в электрических сетях большой мощности, так и в современных приводах переменной скорости [SIM 97]. Электрические, механические и электронные элементы мощности представлены моделями, позволяющими также принимать в расчёт нелинейность. Регулировка и управление этими системами всё чаще и чаще выполняются при помощи цифровых элементов, устройство цифрового моделирования должно представлять соответствующие модели. Такое устройство моделирования названо симулятором смешанных сигналов (аналоговых/цифровых). Одновременное наличие, в том же средстве моделирования, аналоговых и/или цифровых взаимодействующих компонентов должно быть тщательно проанализировано. Необходимо принять в расчет взаимодействия и обмен информацией между элементами обоих типов, соблюдая их физические свойства. Это требование вводит несколько задач, которые должны быть решены для построения и понимания эффективного средства смешанного моделирования. 2. Средство моделирования смешанных сигналов для электрических систем мощностиЭтот раздел представляет основные характеристики средства моделирования смешанных сигналов. 2.1 Аналоговые и цифровые компонентыПомимо возможностей, предложенных условной программой численного моделирования (модели для различных электрических и механических элементов, для мощной электроники и для аналогового контроля), устройство моделирования смешанных сигналов должно включать модель для элементов цифрового контроля, наиболее используемых в наши дни, как те, что представлены на рисунке 1 (задержка, квантователь, преобразованный в Z, опрокидывающее устройство, счетчики, генератор импульсов...) 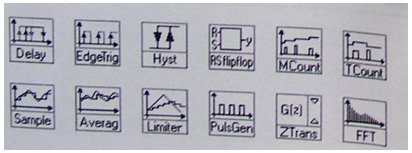
Рисунок 1 – Примеры элементов цифрового контроля Пример системы электрической мощности, включающей аналоговые и цифровые устройства контроля-управления, представлен на рис.2. Для правильного анализа такой системы, устройство моделирования должно быть пригодно для моделирования аналоговых элементов (синхронный двигатель, трансформатор, вращающаяся механическая система, регуляторы и другие элементы аналогового управления), нелинейных аналоговых элементов (прерыватели, полупроводники, насыщение) и цифровых элементов контроля-управления. 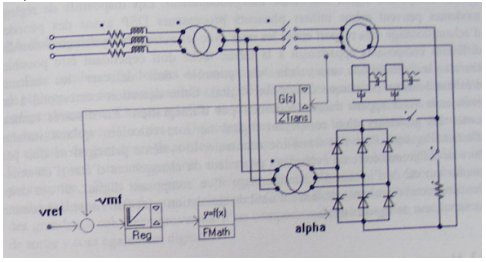
Рисунок 2 – Пример электрической системы мощности, включающей аналоговые и цифровые элементы контроля Нелинейные элементы и цифровые элементы контроля генерируют события в течение шага интеграции. Чтобы правильно принять в расчет цифровую характеристику регулирования, как например различные задачи DSP (Digital Signal Processor), средство моделирования должно быть способным вычислить каждую цифровую величину в соответствии со своим периодом выборки. Для этого, моделирующее устройство должно быть снабженным процедурами Back-Tracking, позволяющим повторить интегрирование с укороченным шагом, с целью достижения непосредственного события. Такой тип моделирующего устройства позволяет корректно имитировать одновременное наличие и цифровых аналоговых сигналов. Решение, допущенное в рамках этой статьи – следующее: после каждого шага интеграции, главная система пробегает по всем модулям, участвующим в моделировании, чтобы они были аналоговыми или цифровыми. Система полностью вычисляет новые значения, соответствующие окончанию последнего шага интеграции. Эти значения временные и использованы для распознавания событий, которые могли случиться в течение этого последнего шага интегрирования. Если никакое событие не обнаружено, система сохраняет вычисленные значения и начинает новую интеграцию. Если одно или несколько событий определены, система выбирает первое и вновь запускает новую интеграцию с шагом интеграции приведённой длины. Эта интеграция приводит совокупность систем точно в момент появления обнаруженного события. 2.2. Синхронная и асинхронная характеристикаЧтобы выполнить моделирование асинхронных задач, необходимо разработать цифровые компоненты, имеющие свой собственный датчик времени. Это означает, что каждый цифровой компонент будет функционировать независимо. Современные устройства регулирования могут использовать даже несколько процессоров DSP, имеющих периоды выборки без целого отношения одних с другими. Синхронизация различных компонентов, принадлежащих той же задаче, должна быть, тем временем, возможной. В течение моделирования, задача контроля должна обнаружить моменты отобранных образцов каждого цифрового компонента. Это распознавание соответствует событию, появившемуся в течение последнего шага интеграции. Иными словами, все величины цифрового компонента вычислены только в моменты выборки. Для максимальной гибкости, главная система не должна делать различий между происходящим событием изменения состояния полупроводника или момента выборки цифрового компонента. Если эти два последних условия удовлетворены, средство моделирования может быть рассмотрено, как моделирующее устройство смешанных сигналов. 2.3 Измерения и преобразователи A/DМоделирование измерительных приборов должно принимать в расчет точность преобразователей A/D. Это означает, например, что дискретизатор должен прочесть не только величину, измерявшуюся в моменты выборки, но также конвертировать эту измеряемую величину, принимая в расчет измерительный диапазон в числе доступных битов для преобразования. Пример рисунка 3 может иллюстрировать эту характеристику для измерения напряжения. 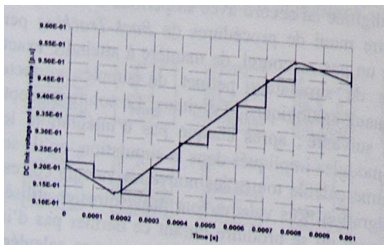
Рисунок 3 – Действительные значения и значения выборки Для определения на участке в 10 кВ с 10 битами, принимая в расчёт бит знака, решение представлено: 
Этот пример проиллюстрирован на рисунке 3 для напряжения промежуточного этапа с решением и измерительным участком, определенным выше. Список литературы
|