Назад в библиотеку
Обзор методов нейроуправленияАвторы: А.Н. Чернодуб, Д.А. Дзюба АннотацияА.Н. Чернодуб, Д.А. Дзюба. Обзор методов нейроуправления. Рассматриваются методы применения нейронных сетей для решения задач управления динамическими объектами. Для каждого вида нейроуправления приводятся схемы соединения нейросетей внутри системы управления и детально описываются процедуры их обучения. Анализируются преимущества и недостатки описанных методов. Нейроуправление динамическими объектами является новым перспективным направлением, находящимся на стыке таких дисциплин, как автоматическое управление, искусственный интеллект, нейрофизиология. Нейронные сети обладают рядом уникальных свойств, которые делают их мощным инструментом для создания систем управления: способностью к обучению на примерах и обобщению данных, способностью адаптироваться к изменению свойств объекта управления и внешней среды, пригодностью для синтеза нелинейных регуляторов, высокой устойчивость к повреждениям своих элементов в силу изначально заложенного в нейросетевую архитектуру параллелизма. В литературе описаны многочисленные примеры практического применения нейронных сетей для решения задач управление самолетом [1-3], автомобилем [4], горнообогатительным процессом [5], скоростью вращения вала двигателя [6], электропечью, турбогенератором, сварочным аппаратом, пневмоцилиндром. По-видимому, идея применения нейронных сетей для управления динамическими объектами впервые была высказана У. Видроу еще в 1964 г., однако интенсивные исследования этого направления развернулись лишь в конце 80-х годов прошлого века. Один из первых обзоров в области нейроуправления (1992 г.) упоминает 5 методов обучения нейросети для непосредственного управления объектом. С тех пор количество методов нейроуправление многократно увеличилось, появились новые решения на основе многомодульного подхода и приближенного динамического программирования. В ходе развития нейроуправления, исследовались различные способы построения нейроконтроллеров с применением различных типов нейронных сетей: линейных типа «Адалина», многослойных персептронов, рекуррентных сетей, сетей радиальных базисных функций [1] и др. Наилучшие результаты получены при использовании многослойных персептронов с линиями задержек. Сформировались два основных направления в применения нейронных сетей внутри синтезируемых регуляторов: прямые методы, основанные на непосредственном управлении объектом с помощью нейронной сети, и непрямые методы, когда нейронная сеть используется для выполнения вспомогательных функций управления, таких как фильтрация шума или идентификация динамического объекта. В зависимости от числа нейронных сетей, составляющих нейроконтроллер, системы нейроуправления могут быть одномодульными или многомодульными. Схемы нейроуправления, которые применяются совместно с традиционными контроллерами, называются гибридными. Ключевой проблемой при решении задач управления динамическими объектами является реализация модели инверсной динамики управляемого объекта. Аналитическое решение этой задачи не всегда возможно, поскольку требуется обращение причинно-следственных зависимостей поведения реального объекта. Применение нейронных сетей позволяет находить приближенные решения этой задачи путем обучения сети на примерах управления реальным объектом. При использовании прямых методов нейроуправленяия, в частности, в методе обобщенного инверсного нейроуправления это достигается путем непосредственного обучения нейронной сети на примерах поведения управляемого объекта. Однако, используемые для такого обучения последовательности примеров, полученные путем обращения результатов наблюдения реальных объектов часто содержат противоречия, резко снижающие качество обучения нейронной сети. Для решения этой проблемы предложен ряд методов. В методе специализированного инверсного нейроуправления и некоторых версиях систем адаптивной критики [3] проблема обучения инверсной динамике решается путем аппроксимации аналитической модели управляемого объекта и вычисления локальных значений якобиана для различных областей пространства состояний. В методе обратного распространения ошибки через прямой нейроэмулятор для формирования линеаризованной модели инверсной динамики объекта используется обычная схема обратного распространения ошибки, применяемая для обучения многослойных персептронов. В системах многомодульного нейроуправлении эта же задача решается путем разделения пространства состояний объекта на локальные области, в которых инверсные модели представлены однозначными функциями. Для каждой такой области выделяется отдельный нейронный модуль. Перспективными для моделирования инверсной динамики могут оказаться новые типы нейронных сетей, позволяющие моделировать многозначные функции, в частности, вероятностные сети Бишопа на основе смесей гауссовских моделей (Mixture Density Networks) [24]. Структура системы управления динамическими объектамиВ задачах нейроуправления для представления объекта управления используют модель черного ящика, в котором наблюдаемыми являются текущие значения входа и выхода. Состояние объекта считается недоступным для внешнего наблюдения, хотя размерность вектора состояний обычно считается фиксированной. Динамику поведения объекта управления можно представить в дискретном виде: 
где S(k)– значение N-мерного вектора состояния объекта на k-м такте; u(k) – значение P-мерного вектора управления; y(k+1) – значение V-мерного выхода объекта управления на такте k+1. Общая схема управления динамическим объектом показана на рис.2 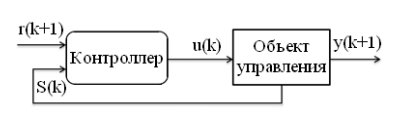
Рисунок 2 – Общая схема управления по обратной связи Для оценки вектора состояния динамического объекта порядка может быть использована модель нелинейной авторегрессии с дополнительными входными сигналами(NARX): 
На практике, это соотношение обычно используют без ретроспективных управляющих входов: 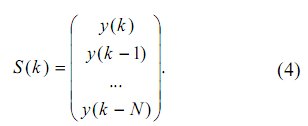
Состояние динамического объекта можно также представить мгновенным снимком его фазовой траектории: 
При описании конкретных схем нейроуправления мы будем отдавать предпочтение модели (4). На схемах для ввода в контроллер задержанных данных обратной связи будет использоваться модуль линии задержек «TDL» (Tapped Delay Line). Для упрощения мы будем рассматривать только одноканальные системы управления (SISO), однако приводящиеся соотношения могут использоваться и для многоканальных систем (MIMO). Для этого следует лишь заменить в формулах скалярные переменные на входе и выходе объекта управления векторными. Список литературы
|