
Реферат за темою випускної роботи
Зауважте, що на момент написання реферату магістерська робота ще не завершена. Остаточні результати можна буде отримати у грудні 2012 року зв'язавшись з автором.
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 4. Особливості руху ЛА
- 5. Похибки, що виникають при проведенні траєкторних вимірювань
- 6. Виключення похибок із результатів вимірювань
- Висновки
- Перелік посилань
Вступ
При розробці і виробництві авіаційної та ракетно-космічної техніки виконується велика кількість різноманітних за складністю і характером випробувань, таких як лабораторні, стендові і найскладніші й дорогі — льотні.
Сучасні літальні апарати (ЛА) є дуже складними і дорогими системами. Вимоги до них в плані льотних, економічних, екологічних та бойових характеристик постійно збільшуються. При цьому зростає роль практичних випробувань у визначенні відповідності параметрів практичної моделі теоретичним. При розробці сучасних ЛА через неможливість повного і адекватного теоретичного опису до половини всіх виникаючих проблем виявляються при випробуваннях. А велика тривалість і вартість їх проведення стають одними з головних чинників часових та економічних витрат. Тому для вирішення проблеми скорочення витрат слід покращувати якість практичних випробувань, підвищувати точність вимірювальних систем і знімати якомога більше параметрів за один експеримент. Раціоналізувати сам процес тестування можна комплексним плануванням і максимально точної обробкою отриманих результатів.
1. Актуальність теми
Зважаючи на технічну та технологічну складність, а також високу вартість складових частин літальних апаратів та ракетно-космічної техніки виготовляти великі партії об'єктів для льотних випробувань недоцільно. Це призводить до зменшення числа експериментів і істотно обмежує можливість визначення ефективності зразків методами статистичної обробки експериментально отриманих при льотних випробуваннях даних. Таким чином, виникає необхідність розробки нових комбінованих методів аналізу, що враховують інформацію про об'єкт, накопичену раніше в попередніх дослідах, і теоретичні розрахунки і прогнози. Від достовірності та повноти апріорної інформації залежить кількість льотних випробувань для визначення необхідних показників ефективності.
Підвищення ефективності досягається вимірюванням найбільш інформативних параметрів або використанням більш високоточних систем вимірювання. У загальному випадку, рух ЛА складається з поступального руху центру мас і обертального руху відносно центру мас. У число вимірюваних входять параметри [1]:
- характеризують положення і рух центру мас щодо різних систем відліку (координати об'єкта, його лінійна швидкість і прискорення);
- визначають переміщення об'єкта щодо його центру мас (кути курсу, тангажа, атаки);
- стежать за роботою бортових систем (тиск, температура і т.д);
- параметри зовнішнього середовища (тиск, вологість і т.д.).
Перша група параметрів визначається системами зовнішньотраєкторних вимірювань, друга і третя — радіотелеметричними системами, четверта — радіозондуванням.Синхронізуються вони службою єдиного часу.
Зовнішньотраєкторні — вимірювання, що проводяться з метою визначення дійсного руху центру мас ЛА. У деяких випадках проводиться визначення його кутової орієнтації щодо прийнятої системи координат [1].
Вимірювальні системи при цьому можуть бути оптичними (кінотеодоліти) і радіотехнічними (радіолокаційні станції — РЛС). Знаходитись вони можуть на суші, кораблях або повітряних об'єктах. Радіотехнічні системи володіють тією перевагою, що вони дозволяють отримувати значно більше параметрів на великих дальностях, ніж оптичні, і в значно меншій мірі залежать від погодних умов. Але при цьому оптичні методи визначення параметрів руху ЛА є більш точними. Особливо яскраво це спостерігається на дуже малих висотах поблизу поверхні Землі або при малій відстані між ЛА і РЛС.
2. Мета і задачі дослідження та заплановані результати
Метою дослідження є аналіз даних зовнішньотраєкторних вимірювань, виявлення аномалій і виключення грубих помилок, побудова алгоритму для автоматичної обробки в цифрових обчислювальних системах.
Основні задачі дослідження:
- Аналіз сучасних методів і засобів проведення траєкторних вимірювань.
- Виявлення причин апаратних збоїв, основних параметрів точності і надійності засобів вимірювань. Пошук оптимальних методів виявлення цих збоїв.
- Аналіз ситуацій, коли відбулися сильні зміни в характері руху ЛА і система приймає рішення про помилку. Пошук способів обліку таких подій при обробці результатів вимірювань.
Об'єкт дослідження: апаратура та алгоритми аналізу зовнішньотраєкторних вимірювань.
Предмет дослідження: виключення грубих помилок (промахів) з аналізу результатів зовнішньотраєкторних вимірювань.
У рамках магістерської роботи планується отримання актуальних наукових результатів: розробка алгоритму пошуку і виключення грубих похибок вимірювань, що враховує прийняття помилкового рішення про помилку.
3. Огляд досліджень та розробок
Необхідність у зовнішньотраєкторних вимірах виникла в першій половині XX століття в зв'язку з розвитком авіації та необхідністю проведення бойових випробувань. Перший полігон для таких цілей в СРСР був обладнаний на Керченському півострові. Це обумовлювалося великою кількістю сонячних днів, необхідних для проведення льотних дослідів, тому що в якості вимірювальних систем використовувалися кінотеодоліти. Завданнями траєкторних вимірювань займалися Корнюшин І.В., Богомолов А.С., Кушнарьов П.І. [11]. Для забезпечення надійності за випробуваним об'єктом стежили все радіолокаційні і кінотеодолітние станції, розташовані на чотирьох вимірювальних постах. Всього вимірювалося 28 координат, з яких тільки 3 — 4 використовувалися для аналізу [12]. Через нераціональність такого підходу велась робота над створенням нових методів обробки, що дозволяють використовувати всі отримані дані.
У 1963 році такий метод запропонував Огороднійчук М.Д. Його розробка дозволяла використовувати як мінімум інформації (три виміри), так і весь ансамбль просторово надлишкових вимірів. Продовженням його роботи стала розробка методики обліку як просторової, так і тимчасової надмірності. Головною складністю при цьому був той факт, що траєкторії ЛА мали довільну форму. В результаті, в 1974 році були представлені два методи [12]:
- метод роздільного реалізації просторової і тимчасової надмірності даних вимірів;
- метод спільної їх реалізації.
Перший відразу став широко використовуватися, а другий вимагав великих обчислювальних потужностей, недоступних на той час. Зараз другий метод вже може бути реалізований.
Разом з Огороднійчуком М.Д. надалі працювали Кушнарьов П.І., лаврак В.М., Глушков В.Г., Пасльон В.В., Парасіч Ю.Н.
Кушнарьов займався самоконтролем точності вимірювальних засобів; Лаврак — адаптивними алгоритмами згладжування, що базуються на різних критеріях оптимальності; Глушков — виявлення та усунення збоїв; Парасіч — вплив автокореляції помилок на точність визначення траєкторії; Паслен — створенням пристрою адаптивного оптимального згладжування і програмуванням другого методу на ЕОМ.
В роботах Б.Ф. Жданюка розглядаються питання статистичної обробки результатів вимірювань, використання згладжуючих фільтрів для попереднього аналізу, визначення руху літальних апаратів за результатами траєкторних вимірювань на основі динамічних і кінематичних моделей, вплив помилок геодезичної прив'язки вимірювальних засобів, виключення аномальних результатів вимірювань з обробки, оцінка точності некерованого руху ЛА і планування проведення траєкторних змін [2].
Є.І. Крінецкій, Л.Н. Александровська, В.С. Мельников, Н.А. Максимов займалися математичним описом руху ЛА в просторі, точністю і методами виявлення просторового розташування ЛА, впливом розташування вимірювальних засобів на точність оцінок параметрів руху, основними алгоритмами і комплексами обробки інформації [1].
Також, проблемами траєкторних вимірювань займалися такі вчені, як Аким Е.А і Енеев Т.М. [4], Ельясберг П.Є. [5], Агаджанов П.А., Дулевіч В.Є., Коростельов А.А. [8], Башхіян Б.Ц. [9], Назаренко О.І. [10] та інші. Із зарубіжних авторів варто відзначити Харві Р.А [3], Кінг-Хілі Д. [6], Раух Г. [7] та інші.
Починаючи з 1998 року в Донецькому національному технічному університеті на базі кафедри Радіотехніки та захисту інформації під керівництвом кандидата технічних наук, доцента Пасльона В.В. ведеться робота з удосконалення та реалізації алгоритмів обробки даних траєкторних вимірювань, що володіють просторової і тимчасової надмірністю, а також виявлення та усунення помилок і створення статистичних методів згладжування. Цими питаннями займаються Мотильов І.К., Мільштейн А.В., Дрозда І.В.
4. Особливості руху ЛА
Рух ЛА є досить складним процесом, оскільки він весь час перебуває під дією зовнішніх сил і залежить від параметрів навколишнього середовища, конструкції, системи управління та інших факторів. Все це ускладнює аналіз, тому реальний рух замінюється спрощеною моделлю, що відбиває основні закономірності руху ЛА. Моделі поділяються на динамічно і кінематичні в залежності від обліку інформації про інертність ЛА і силах, що діють на нього під час польоту.
Шукані параметри руху можуть бути отримані інтегруванням відповідної системи диференціальних рівнянь руху ЛА:

де — вектор деяких постійних
параметрів,
що характеризують ЛА,
його систему керування та зовнішнє
середовище, в якому здійснюється політ.
— вектор деяких постійних
параметрів,
що характеризують ЛА,
його систему керування та зовнішнє
середовище, в якому здійснюється політ.
Така система диференціальних рівнянь являє собою динамічну модель руху ЛА. Її розробка складається з наступних пунктів:
- схематизація сил, що діють на ЛА під час польоту;
- вибір системи відліку, пов'язаної з будь-яким матеріальним об'єктом, щодо якого ведеться спостереження за рухом ЛА;
- визначення вихідних векторних співвідношень, що характеризують закони руху;
- вибір системи координат;
- проектування вихідних векторних співвідношень на осі обраної системи координат і запис скалярних рівнянь руху.
При вирішенні конкретних завдань вибирають схеми ЛА і діючих на нього сил такими, щоб математична модель руху могла забезпечити необхідну точність опису дійсного руху ЛА. Майже у всіх практичних завданнях визначення руху об'єкта на основі математичної обробки траєкторних вимірювань ЛА можна представити як тверде тіло постійної або змінної маси, пр русі якого вісь симетрії ЛА збігається з вектором швидкості його центру мас.
Динамічна модель називається детермінованою, якщо всі діючі сили описуються детермінованими залежностями. Такі моделі застосовують для опису руху штучних супутників Землі (ШСЗ), частин балістичних ракет та інших ЛА на ділянці некерованого (балістичного) польоту. При цьому допускається, що щільність атмосфери, аеродинамічний опір і інші зовнішні фактори вважаються відомими. В реальності це не так, тому така модель часто не дозволяє досягти необхідної точності визначення руху ЛА.
Випадкові флуктуації повітряних мас можуть викликати значні відхилення від вихідної траєкторії польоту. Тому врахування всіх випадкових факторів їх вводять в модель, яка називається стохастичною.
Якщо відомості про деякі силах, що діють на об'єкт відсутні, то застосовується кінематична модель руху, тобто не враховується інерційність (маса) ЛА.
Динамічна модель руху застосовується при визначенні некерованого руху, що здійснюються під дією описуваних математичними залежностями сил. Кінематична — для визначення керованого руху ЛА. нижче на малюнку представлені траєкторії руху, описувані динамічної і кінематичної моделями, тобто детермінована і недетерміновані траєкторії.
Рисунок 1 –
Детермінована та недетермінована траекторії ЛА,
біла смуга — недетермінована, жовта
смуга — детермінована
(анімация: 8 кадрів, 7 циклів повторення, 300х400 пікселів, 31 кілобайт, тривалість
одного кадру 500 мс, зроблено в GIMP)
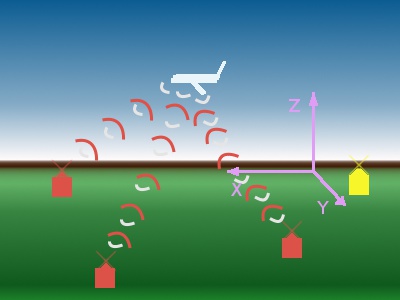
Рисунок 2
– Методика проведення зовнішньотраєкторных вимірювань.
Червоні прямокутники — активні РЛС, що опромінюють ціль
(показано червоним) и приймаючі відбитий сигнал (показано сірим).
Жовтим позначено кинотеодолитну станцію.
5. Похибки, що виникають при проведенні траєкторних вимірюваннь
Під час вимірювання навігаційних параметрів в результаті впливу на систему великої кількості невраховуваних випадкових факторів виникають помилки вимірювань. Наявність випадкових помилок у виміряних навігаційних параметрах призводить до помилок у визначенні поверхонь і ліній положення, а отже і до помилок у визначенні координат ЛА. При цьому значення помилки місцевизначення залежить як від значення помилки навігаційних параметрів, так і від методів розрахунку координат.
Сумарну помилку варто розглядати як що складається з трьох частин: сингулярної, регулярної і грубою.
Сингулярні помилки є наслідком впливу на вимірювальну систему постійних або медленнозмінних невраховуваних факторів (умови поширення радіохвиль, неточність градуювання шкал і прив'язки до системи єдиного часу і т.д.). В межах одного сеансу вимірювання такі помилки змінюються неістотно, тому їх називають систематичними. Вони визначаються як різниця між середнім арифметичним та істинним значенням вимірюваної величини:
Регулярні помилки виникають при флуктуаційних відхиленнях умов вимірювань від нормальних. Наприклад, відхилення умов поширення радіохвиль, дрейф робочої частоти опорного генератора, теплові шуми апаратури і т.д. Такі помилки прийнято називати швидкоплинними або випадковими. Розподіл ймовірності таких помилок внаслідок впливу великої кількості випадкових незалежних факторів у більшості випадків підпорядковане нормальному закону розподілу. Випадкова складова характеризується дисперсією :
Третя складова — груба помилка — виникає внаслідок різкого порушення умов роботи вимірювальної системи при окремих вимірах. Варто відзначити, що іноді за грубу помилку приймається різкі зміни поведінки вимірюваного параметера, які іноді можуть виникати в певних ситуаціях (наприклад, скидання бомби призводить до полегшення літака і збільшення його прискорення).
Між систематичної і випадкової складовими сумарною помилки існує кореляційний зв'язок. При цьому для сингулярної помилки коефіцієнт кореляції відмінний від нуля, а інтервал кореляції порівняємо і часто перевершує інтервал вимірювань. Для регулярної інтервал кореляції значно менше часу вимірювання, а коефіцієнт кореляції близький до нуля.
6. Виключення похибок із результатів вимірюваннь
Систематичні помилки можуть бути усунені точною юстировкою вимірювальної системи по реперних точок. Грубі помилки різко виділяються із загальної серії вимірювань і повинні відбраковувати ще до аналізу даних. Тоді вважають, що помилка вимірювальної системи має нормальний закон розподілу з нульовим математичним очікуванням і дисперсією, пропорційною шумам, впливаючим на систему. Така помилка зазвичай враховується при обробці. Існує кілька способів оцінки випадкових помилок:
- Метод найменших квадратів. При цьому відбувається наближене подання (апроксимація) заданої функції іншими (простішими) функціями.
- Метод Гаусса — Ньютона, якщо є достатньо достовірні апріорні значення шуканих параметрів.
- Метод максимальної правдоподібності. Невідомі параметри оцінюються на припущенні, що відомий закон розподілу вимірюваних випадкових величин, що залежать від шуканих параметрів.
- Метод максимуму апостеріорної ймовірності. Грунтується на припущенні, що оцінюваний вектор параметрів випадковий і має своє розподіл ймовірностей.
Попередня обробка даних траєкторних вимірювань включає в себе згладжування результатів:
- згладжування дискретних вимірювань алгебраїчними многочленами;
- згладжування лінійною комбінацією ортогональних поліномів;
Виключення аномальних результатів з сукупності вимірів доцільно здійснювати в процесі їх отримання та математичної обробки. При цьому враховується закономірність зміни параметрів руху ЛА. Перевірку на аномальність в процесі отримання результатів проводять за умовою знаходження результату в допустимих межах вимірів:
hmin ≤ hi ≤ hmax
де hi – виміряне значення, hmin, hmax – допустиме значення.
Додатково може здійсьнюватись перевірка модуля разності двох сусідніх у часі вимірювань:
|hi+1 – hi| ≤ | zmax |ti+1 – ti||
zmax – максимальне значення швидкості зміни параметра для даного типу траєкторії ЛА.
Перевірка висірювань на аномальність виконується у наступній послідовності:
- складання выбірки з перших вимірювань;
- обчислення згладжених вимфрювань;
- разрахунок оцінки середньоквадратичного відхилення (СКВ) похибок;
- складання довірчого интервала.
Румшинський [13] пропонує для усунення грубих помилок наступний підхід:
- При відомому СКВ σ знаходять середньоарифметичне значення всіх
результатів крім перевіряємого. Потім порівнюють абсолютну величину різниці перевіряємого і середнього
значення, обчислюють величину:
і підраховують значення ймовірності 1 - 2Ф(t). Тут n — кількість вимірювань крім перевіряємого, Ф(t) — інтеграл ймовірності. Якщо ймовірність 1 - 2Ф(t) виявиться дуже малою, то перевіряєме значення містить грубу помилку і його слід виключити.
- Якщо σ заздалегідь невідома, то вона оцінюється приблизно за
результатами вимірювань, тобто замість неї застосовують емпіричний стандарт
При цьому абсолютну величину різниці між середньоарифметичним і перевіряємим ділять на емпіричний стандарт. Отримане відношення порівнюють з критичними значеннями tn(P), які заздалегідь розраховані і зібрані в таблиці [13]. Якщо при заданому числі n прийнятних результатів відношення знаходиться між двома критичними значеннями при надійностях P1 і P2 (P1 < P2), то можна стверджувати, що перевіряєме значення містить грубу помилку і його слід виключити з результатів обробки.
Висновки
Проведення зовнішньотраєкторних вимірювань і знаходження оптимальних способів обробки отриманих результатів являють собою актуальну задачу. Вартість і терміни їх проведення інколи складають до половини всіх витрат на проектування літальних апаратів. У зв'язку з значно збільшеною потужністю сучасної комп'ютерної техніки стають популярної статистичної обробки результатів вимірювань, недоступна раніше через складність обчислень. Запропоновані в роботі методи дозволяють значно підвищити точність вимірювання параметрів дійсного руху ЛА, виключивши або зменшивши вплив різних зовнішніх факторів, що становлять похибки.
Перелік посилань
- Кринецкий Е.И.,
Александровская Л.Н., Мельников В.С., Максимов Н.А. / Основы испытаний
летательных аппаратов: Учебник для втузов / Под общ. ред. Е.И
Кринецкого. — М.: Машиностроение, 1989. — 312 с.:
ил.
ISBN 5-217-00355-3 - Жданюк Б.Ф. / Основы статистической обработки траекторных измерений. — М.: Сов. радио, 1978. — 384 с., ил.
- Harvey R.A. Probability, Approach to Aeronautical Research and Development / Aeronautical Jornal, 1973, 74, p 373 — 378/
- Аким М.А.,
Энеев Т.М. Определение параметров движения космических аппаратов по
данным траекторных измерений. —
Космические исследования
, 1963. / М. Минский. — М.: Мир, 1971. – 364 с. - Эльясберг П.Е.
Определение движения по результатам измерений. М.,
Наука
, 1976. - Кинг-Хили Д.
Теория орбит искусственных спутников Земли в атмосфере. Пер с англ.,
М.:
Мир
, 1966. - Раух Г.
Оптимальная оценка траекторий спутника с учётом случайных флюктуаций
лобового сопротивления. Пер с англ. —
Ракетная техника и космонавтика
, 1965, №4. - Агаджанов П.А.,
Дулевич В.Е., Коростелёв А.А.
Космические траекторные измерения. Радиотехнические методы измерений и
математическая обработка данных. М.:
Советское радио
, 1969. - Бахшиян Б.Ц.
Оптимальный выбор информации, используемой при определении траетории
движения космического аппарата. —
Космические исследования
, 1969. - Назаренко А.И.
Некоторые вопросы оптимизации обработки орбитальных измерений
искусственных спутников Земли. —
Космические исследования
, 1968. - Куликов С.М. — Авиация и ядерные испытания [Электронный ресурс]. — Режим доступа: http://militera.lib.ru/h/kulikov_sm/01.html.
- Михайлов М.В., Мотылев К.И., Щербов И.Л., Паслен В.В. — История возникновения и развития обобщённых методов и адаптивных алгоритмов обработки траекторной информации. — Матеріали IV Міжнародної науково-практичної конференції "Динаміка наукових досліджень — 2005". Том 25. Історія. — Дніпропетровськ: Наукаі освіта, 2005, с. 9 — 12.
- Румшинский
Л.З. Математическая обработка результатов эксперимента. Главная
редакция физико-математической литературы изд-ва
Наука
, 1971