
Реферат по теме: Определение основных параметров математической модели и обоснование методов повышения качества допплеровского пеленгатора
Содержание
- Введение.
- 1. Актуальность темы.
- 2. Цель и задачи исследования, планируемые результаты.
- 3. Cуществующие методы радиопеленгации.
- 3.1 Амплитудный метод.
- 3.2 Фазовый метод.
- 4. Обзор доплеровского пеленгатора с вращающейся антенной.
- Выводы.
- Список источников.
Введение
Радиопеленгация – область радиотехники, предметом которой является обнаружение направления на различные объекты, определение их местоположения и параметров движения. Радиопеленгация основывается на приеме отраженных от различных объектов (целей) радиоволн или собственных излучений объектов. По характеру сигнала, который принимается, радиолокационные станции, делят на три вида: активные, с активным ответом и пассивные [1].
Радиопеленгатор измеряет угол прихода электромагнитной волны к приемнику, и позволяет определить направление на источник радиоизлучения [1].
Пеленг – угол между направлением на источник радиоизлучения из точки пеленгования и некоторым исходным направлением.
В активной радиолокационной станции принимается сигнал, образованный после отражения от цели излученного (зондирующего) сигнала.
В радиолокации с активным ответом на объекте радиолокационного наблюдения (РЛН) устанавливается ответчик – приемопередающее устройство, которое принимает зондирующий сигнал, усиливает и переизлучает его в направлении радиолокационной станции (РЛС). Это делается для увеличения помехоустойчивости или повышения дальности действия РЛС. Характерным примером этого направления является система государственного опознавания, в которой объект оснащён активным ответчиком, излучающим электромагнитную волну в ответ на запросную (облучающую) волну радиолокатора.
В пассивной радиолокации зондирующий сигнал не излучается, а принимается лишь собственное излучение объекта радиолокационного излучения [4].
В данной магистерской работе будут рассмотрены пассивные радиолокационные станции
1. Актуальность темы
В настоящее время наиболее востребованными являются широкодиапазонные пеленгационные системы. Для реализации которых наилучшим способом подходят фазовые радиопеленгаторы. Так же отличительной особенность этих пеленгаторов является то, что для них не имеет принципиального значения вид модуляции принимаемых колебаний. Пеленгаторы этого типа позволяют решить задачи уменьшения ошибок вызванных непостоянством фазы принимаемых колебаний. Разработками систем основанных на базе этого метода занимаются такие фирмы как «Roden & Sсhwarz», «Fernau», «ОКБ МЭИ» «ИРКОС», и многие другие.
2. Цель и задачи исследования, планируемые результаты
Цель данной магистерской работы – сравнительный анализ схем построения доплеровского пеленгатора, и определение границ их применения.
Основные задачи исследования:
- Анализ методов работы доплеровских пеленгационных устройств;
- Описание различных вариантов схем построения доплеровского пеленгатора;
- Определение достоинств и недостатков каждой из схем;
- Определение областей применения исследуемых методов.
Предмет исследования: структурные схемы пеленгаторов, работающих на основе доплеровского метода определения координат.
Для достижения поставленных целей необходимо провести:
- Изучить основные методы построения доплеровских пеленгаторов;
- Провести анализ существующих методов построения доплеровских пеленгаторов;
- На основании анализа выбрать методы, позволяющие добиться наилучших результатов;
- Провести моделирование выбранных схем, для подтверждения теоретических результатов;
- Выявить достоинства и недостатки, присущие каждому из вариантов построения радиопеленгатора;
- Определить границы применения каждой из схем.
3. Cуществующие методы радиопеленгации.
Для определения угловых координат целей используются пеленгационные радиолокационные устройства.
Угломерное устройство включает антенную систему, приёмник для обработки принятых радиолокационных сигналов и измерительное устройство. Одной из основных характеристик угломерного устройства является его пеленгационная характеристика, представляющая собой зависимость выходного напряжения приёмника от направления прихода радиоволны Uвых(φ). В зависимости от того, какой параметр сигнала – амплитуда, частота или фаза – оказывает основное влияние на формирование пеленгационной характеристики, методы измерения угловых координат можно подразделять на амплитудные, частотные или фазовые. Практически находят применение амплитудные и фазовые методы [3].
3.1 Амплитудный метод
Для него используется антенная система с одним или несколькими явно выраженными максимумами или минимумами диаграммы направленности. В пространство излучаются импульсы с длительностью τ и периодом Т. Дальность до цели определяется по времени запаздывания отраженного от цели сигнала, принятого антенной системой. И вычисляется по формуле d= сt/2 [6], где d – дальность, с – скорость света (3·108), t – время запаздывания (время прошедшее от момента излучения сигнала до его приема). В настоящее время широко известны и используются следующие амплитудные методы: максимума, минимума и равносигнальный метод.
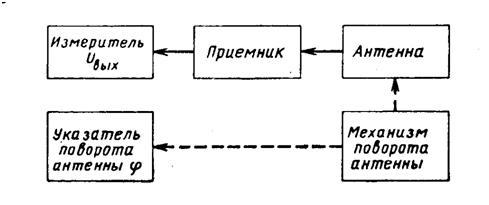
Рис. 1. Упрощенная блок схема амплитудного пеленгатора.
При пеленгации по методу максимума происходит непрерывное изменение углового положения антенны, во время которого она принимает сигналы цели, определение направления на цель производится в тот момент, когда амплитуда сигналов на выходе приемника достигает максимального значения. Угол направления на цель совпадает с углом поворота антенны в момент когда выходное напряжение приемника достигнет максимума.
Достоинства данного метода:
- Простота технической реализации;
- Относительно малое влияние собственных шумов на точность пеленгования [3].
Недостатки:
- Низкая точность измерения угловых координат;
- Низкая разрешающая способность.
При пеленгации по методу минимума используется диаграмма направленности с явно выраженным минимумом. Отсчет угловых координат происходит в момент уменьшения уровня выходного напряжения до минимума. Диаграмма направленности антенны пеленгатора должна иметь в средней части глубокий минимум [1] (рис2).
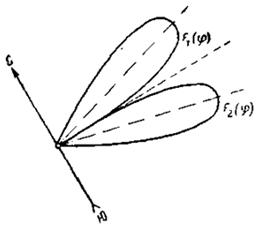
Рис 2. Диаграмма направленности антенны при пеленгации по методу минимума.
При пеленгации по минимуму может быть получена относительно высокая точность измерения угловой координаты, но амплитуда сигнала вблизи направления пеленга становиться очень малой.
Практически по методу минимума можно пеленговать только источники мощного собственного излучения. Поэтому метод пеленгации по минимуму, получил широкое применение в радионавигации.
Определение максимума (или минимума) сигнала может производиться как визуально, с помощью монитора, так и на слух, с помощью головного телефона.
Равносигнальный метод может быть реализован при использовании одной антенны, диаграмма направленности которой периодически изменяет своё положение в пространстве. В этом случае сравнению подлежат сигналы, принятые в различные моменты времени при разных положениях диаграммы направленности.
3.2 Фазовый метод
Метод основан на измерении разности фаз принятых электромагнитных колебаний. Для приема используются две разнесенные в пространстве антенны на расстояние b – называемое базой.
Разность фаз в антеннах равна Δφ: [8]
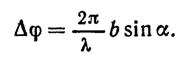
Где α угол прихода электромагнитной волны, λ – длина волны.
Зависимость Δφ (α) является в данном случае пеленгационной характеристикой, а её крутизна определяет точность метода.
Сдвиг фаз между напряжениями, наводимыми в антеннах зависит от направления прихода электромагнитной волны. Разность фаз двух колебаний может рассматриваться как мера запаздывания одного колебания по отношению к другому, выраженная в долях периода колебаний [7].
Фазовые методы пеленгации обладают наибольшей точностью. Он может быть использован для автоматического слежения за целями по угловым координатам. Недостатком фазового метода являются отсутствие разрешающей способности. Одной из разновидностей фазовой радиопеленгации является допплеровский метод, на котором остановимся подробней.
4. Обзор доплеровского радиопеленгатора с вращающейся антенной.
Эффект Доплера заключается в изменении частоты приходящих электромагнитных колебаний, при изменении расстояния R между объектом (источником радиосигнала) и приемником [5]. При использовании гармонической несущей с частотой f0 и начальной фазой φ0 текущее значение фазы колебания на входе приемника определяется значением [2].
При изменении расстояния R, например, из – за движения излучателя с радиальной скоростью
Частота принимаемого колебания
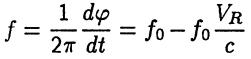
Отличается от частоты излучаемого колебания на значение
Где λ = с/f0 – длина волны (при условии, что VR << c). Величина fD называется частотой Доплера, или доплеровским смещением частоты [2].
Если источник радиоизлучения движется на приемник – то доплеровский сдвиг имеет положительный знак, если ИРИ удаляется от приемника, доплеровский сдвиг будет иметь отрицательный знак.
Рассмотрим фазовый пеленгатор, принцип работы которого, основанный на доплеровском смещении частоты.
Фазовыми называются радионавигационные системы, у которых навигационный параметр определяется путем измерения разности фаз сигналов, принимаемых на разнесенные антенны [9].
Пусть одна из антенн неподвижная (ненаправленная в горизонтальной плоскости), расположенная в начале координат, а вторая вращается с угловой частотой Ω по окружности радиуса R в поле, создаваемым удаленным передатчиком электромагнитных колебаний ω0. Тогда разность фаз принятых колебаний во вращающейся и неподвижной антенне будет равна [9]
Таким образом, фаза сигнала, наводимого в антенне, будет модулирована по синусоидальному закону, а отклонение мгновенной частоты от номинального значения ω0
также будет изменяться с частотой. Причем начальная фаза модулирующего колебания соответствует азимуту на пеленгуемую радиостанцию.
Упрощенная структурная схема фазового пеленгатора с циклическим изменением фазы по высокой частоте показана на рис. 3.

Рис. 3. Упрощенная блок – схема доплеровского пеленгатора.
Приемное устройство должно содержать антенную систему, линейный тракт, устройство понижения частоты, фазовый детектор, выделяющий низкочастотную составляющую сигнала, усилитель низкой частоты и фазовый индикатор, по которому отсчитывается фаза выходного напряжения, соответствующая пеленгу.
Для выделения начальной фазы а, следовательно, определение азимута на передатчик, сигнал с выхода подвижной антенны подается на фазовый детектор, где сравнивается по фазе с опорным напряжением, взятым с неподвижной антенны.
Схемы построения доплеровского пеленгатора.
Существует вариант построения доплеровского пеленгатора без неподвижной антенны.
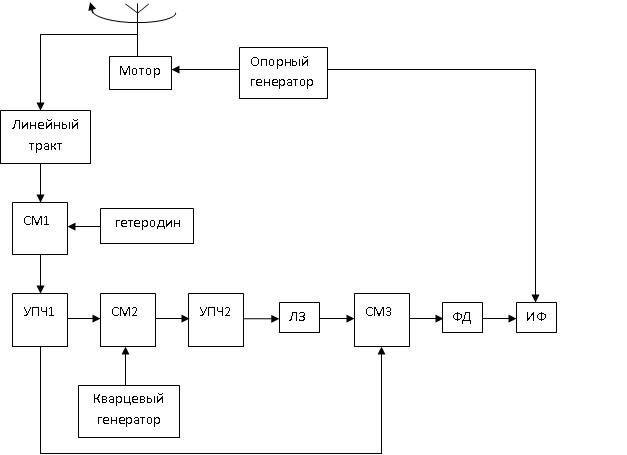
Рис. 4. Блок – схема доплеровского пеленгатора.
Принцип работы такого пеленгатора состоит в следующем.
Приемная антенна представляет собой ненаправленный в горизонтальной плоскости вибратор, который движется по окружности радиусом R, с угловой скоростью равной Ω.
При приеме сигналов во вращающейся антенне будет наводиться электродвижущая сила, модулированная по фазе с частотой Ω. При этом фаза огибающей модулированных колебаний окажется непрерывной функцией азимутального угла θ. После усиления принятых сигналов в радиоприемном тракте в результате детектирования может быть выделена огибающая. Путем сопоставления её фазы с фазой опорного напряжения, представляется возможным определить пеленг на источник радиоизлучения [12].
В качестве опорного напряжения используются колебания местного гетеродина с частой Ω, согласованные с вращением антенны так, что нулевая фаза этих колебаний будет иметь место при прохождении антенны через северное направление меридиана [10].
Для выделения разности фаз, используется следующий прием. Путем смешивания принятого сигнала во втором преобразователе (СМ 2) с напряжением кварцевого генератора, получается напряжение второй промежуточной частоты с тем же законом фазовой модуляции, что и принятое колебание. Это напряжение задерживается в линии задержки (ЛЗ). После этого задержанный сигнал и сигнал первой промежуточной частоты подаются на третий преобразователь частоты, где выделяются колебания с законом изменения фазы, соответствующим закону изменения разности фаз огибающих прямого и задержанного сигналов. В детекторе выделяется значение третьей промежуточной частоты, фаза которой, соответствует азимуту пеленгуемой радиостанции [12].
Напряжения с фазового детектора и опорного генератора подаются на индикатор фазы (ИФ), с которого считывается пеленг.
Рассмотрим принцип работы доплеровского пеленгатора с вращающейся и неподвижной антенной.
Рис. 5 Блок – схема дифференциально – фазового радиопеленгатора. (анимация: 10 кадров, 7 циклов повторения, задержка одного кадра – 0.5 сек., 164 килобайтa)
Мотор вращает подвижную антенну по окружности радиусом R, и угловой скоростью равной Ω, на одном валу с мотором находиться так же генератор опорных напряжений, создающий колебания, фазовый сдвиг которых равен нулю, в момент прохождения вращающейся антенной северного направления [10]. Это напряжение питает индикатор. Вспомогательная ненаправленная антенна применяется для преобразования частоты сигнала в стабильную частоту, определяемую гетеродином, стабилизированным кварцем. Напряжения от обеих антенн поступают на самостоятельные усилители (УВЧ) и смесители (СМ 1), питаемые от общего генератора. Полученные напряжения промежуточной частоты раздельно усиливаются в усилителях промежуточной частоты (УПЧ). Напряжение промежуточной частоты канала вспомогательной антенны смешивается во втором смесителе (СМ 2) с напряжением кварцевого гетеродина частоты fкв. В результате преобразования получается частота fпч — fкв. Напряжение этой частоты смешивается во втором смесителе (СМ2) с выходным напряжением УПЧ основного канала, образуя напряжение частоты fпч — (fпч — fкв) = fкв. Таким образом, напряжение на выходе второго смесителя имеет стабильную частоту, равную частоте кварцевого гетеродина и независимую от частоты сигнала и частоты первого гетеродина, а также и от возможных их изменений. После дополнительного усиления напряжение сигнала подвергается амплитудному ограничению и подается на фазовый детектор как непосредственно, так и через фильтр временной задержки [11]. Где сигнал задерживается на время τ, эквивалентное сдвигу антенны на угол β = Ωτ. Этим достигается уменьшение индекса фазовой модуляции в доплеровских пеленгаторах с большой базой [10]. Фазовый детектор выделяет напряжение частоты коммутации. Последнее сравнивается по фазе с опорными напряжениями в индикаторе. Отсчет по индикатору дает непосредственно значение пеленга.
Выводы
Рассмотренные варианты построения доплеровского пеленгатора позволяют решить задачу уменьшения ошибок пеленгования, возникающих из – за непостоянства фазы поля от радиопередатчика, обусловленного как характером модуляции, так и нестабильностью работы передатчика. Достоинством данных пеленгаторов является возможность пеленгования станций, работающих с любым видом модуляции.
В магистерской работе будут рассмотрены достоинства и недостатки каждой из приведенных схем, и определены возможности и границы применения обоих вариантов.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: январь 2013 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя, Сорочана Анатолия Григорьевича, после указанной даты.
Список источников
- Мазор Ю.Л., Мачусский Е.А., Правда В.И. Радиотехника: Энциклопедия. M.: Додэка XXI, 2002г 948 с.
- Котоусов А.С. Теоретические основы радиосистем. Радиосвязь, радиолокация, радионавигация. М.: Радио и связь, 2002, 224 с.
- Рембровский А. М., Ашихмин А. В., КозьминА. В., Радиомониторинг – задачи, методы, средства. 2 - е издание М. Горячая линия Телеком М. 2010. 624 с.
- Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981. 416 с.
- Колчинский В.Е., Мандуровский И.А., КонстантиновскийМ.И. Автономные доплеровские устройства системы навигации летательных аппаратов. М. «Советское радио» 1975, 432 с.
- Родс Д.Р. Введение в моноимпульсную радиолокацию. Перевод с английского Герасимова Б.М., под редакцией Бахрах Л.Д. М. «Советское радио» 1960, 156 с.
- Кинкулькин И. Е. Рубцов В.Д. Фабрик М.А. Фазовый метод определения координат. М.: «Советское радио» 1979, 280 с.
- Финкельштейн М. И. Основы радиолокации: учебник для вузов. 2 - е издание, «Радио и связь» М. 1983, 645c.
- Айзинов М. М. Байрашевский А.М. Радиотехника и радионавигационные приборы. М.: «Транспорт» 1975, 432 с.
- Вартенесян В. А., Гойхман Э.Ш., Рогаткин М.И. Радиопеленгация. Военное издательство министерства обороны СССР. Москва 1966, 248 с.
- Кукес И.С. Старик М.Е. Основы радиопеленгации. М., «Советское радио» 1964, 640 с.
- Астафьев Г. П., Шебшаевич В. С., Юрков Ю. А., Радионавигационные устройства и системы. М.: «Советское радио», 1958, 863 с.