
Aufsatz
Einleitung
Einleitung
In der modernen Welt ist es unmoglich, ohne dass der Antrieb zu tun. Das Leben ware nicht ernsthaft durch den Aufzug im Haus kompliziert sein. Ohne elektproprivoda schwer vorstellbar, das Kuhlsystem. Wenn Sie vom Allgemeinen zum Besonderen bewegen, werden die DC-Motoren in den folgenden Geraten und Systemen verwendet:
- Cranes verschiedenen Heavy Industries
- Die Antriebsgeschwindigkeitssteuerung Anforderungen uber einen weiten Bereich und hohem Anlaufmoment
- Traction Elektrolokomotiven, elektrische Lokomotiven, Schiffe, Muldenkipper, usw.
- Starter fur Autos, Traktoren, usw.
Schrittmotoren in den Antrieben von Maschinen und Mechanismen man im manuellen Modus oder in einer kontinuierlichen Bewegung treibt, wobei die Regelung uber eine Folge von elektrischen Impulsen, z. B. CNC-Maschinen definiert. Im Gegensatz Servo bietet Schrittantrieb genaue Positionierung ohne Ruckmeldung von der Drehwinkelsensors. Schrittmotoren werden in Geraten von Computer-Speicher verwendet - Diskettenlaufwerk, Festplatte, DVD-Laufwerk-Gerate.
Wenn wir berucksichtigen, die Mikromaschinen, der bequemste Weg, um Leistung bereitzustellen genannt reversible impulstny DC-DC-Wandler DC Stromkreis werden die als H-Brucke.
1. Schrittmotor
Schrittmotor ist ein burstenloser DC-Motor, der das Steuersignal in die Winkelverschiebung des Rotors umwandelt mit der Moglichkeit, den Rotor zu fixieren.
Die Vorteile des Schrittmotors:
- Der Drehwinkel des Rotors wird durch die Anzahl der Impulse bestimmt, die an den Fahrer zugefuhrt werden, die Ruckfragen sind nicht notwendig, und die Geschwindigkeit ist proportional der Frequenz der Eingangsimpulse
- Prazise Positionierung und Wiederholgenauigkeit, der Fehler wird von Schritt zu Schritt nicht akkumuliert
- Schnellstart / Ruckwartsbewegung
- Fahigkeit, niedrige Geschwindigkeit zu produzieren und daher keine Notwendigkeit fur ein Getriebe
- Kein Sammler daher hohe Zuverlassigkeit
- Bei Motoren mit Permanentmagneten ein Anzugsmoment (wenn der Stator erregt wird), der gleich etwa 10% des Haltemoments ist.
Die Nachteile des Schrittmotors:
- Stromverbrauch auch ohne Belastung
- Schrittubersprung ist moglich sowie der damit verbundene Verlust der Kontrolle
- Resonanz (Zeitpunkt Null Resonanzfrequenz)
- Arbeit mit hohen Geschwindigkeiten ist schwierig, infolge des nicht sofortigen Stromanstieges
Nach Konstruktion sind die Schrittmotoren in drei Haupttypen unterteilt:
- Motoren mit variabler Zuruckhaltung
- Motoren mit Permanentmagneten
- Hybrid-Motoren
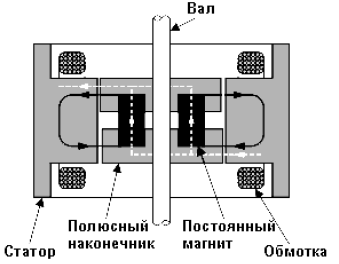
1.1 Motoren mit variabler Zuruckhaltung
Diese Motoren haben einige Polen am Stator und den Rotor in Form eines Zahnrades aus dem magnetischen Material. Die Magnetisierungsrichtung des Rotors fehlt.
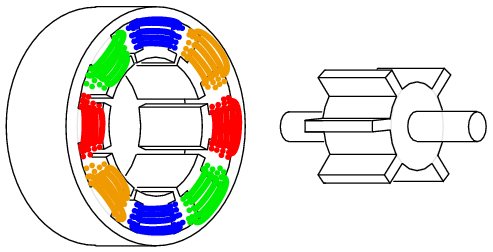
Figur 1 – Aufbau des Motors mit einem variablen Widerstand
Animation zeigt einen Schrittmotor mit sechs Polen am Stator und vier auf dem Rotor und drei unabhangige Statorwicklungen. Dieser Motor hat eine Steigung von 30 °. Wenn der Strom durch eine der Wicklungen flie?t, neigt sich der Rotor in eine Position entsprechend dem entgegengesetzten Pole zu nehmen. Um die Position des Rotors zu andern, muss man ihn von der aktuellen Spule trennen und mit dem nachsten verbinden. Zum Beispiel, falls man die Sequenz von Wicklungen 1-2-3 benutzt, wird der Rotor im Uhrzeigersinn gedreht. Im Gegensatz dazu wird mit einer 1-3-2 Sequenz der Rotor gegen den Uhrzeigersinn gedreht. Dieser Motor ist unempfindlich gegenuber der Richtung des Stromflusses in den Wicklungen. Durch das Fehlen der Magnetisierung des Rotors hat er keine Befestigungspunkte und bietet kurzere Arbeitszeit im Vergleich mit anderen Arten von Schrittmotoren.
Figur 2 – Betrieb des Motors mit einem variablen Widerstand
1.2 Motoren mit Permanentmagneten
Stator Struktur dieser Art von Motor ist nicht viel anders als die Konstruktion von Motoren mit variabler Zuruckhaltung. Der Hauptunterschied im Rotor ist im Permanentmagnet. Gestreifte Rotorpole sind geradlinig und parallel zur Motorachse angeordnet.
Figur 3 – Die Konstruktion des Motors mit Permanentmagneten
In der Animation wird ein zweiphasiger Motor mit drei Paaren von Polen des Rotors und zwei Paaren von Statorpolen gezeigt, was wie in dem vorhergehenden Beispiel eine Steigung von 30 ° ermoglicht. Fur Linkslauf, verwenden Sie die folgende Schaltfolge der Phasen (1)-(2)-(-1)-(-2), bzw. im Uhrzeigersinn (1)-(-2)-(1)-(2). Da die Magnetisierung des Rotors, bietet diese Art von Motor einen gro?eren Moment dem Motor mit variabler Reluktanz gegenuber und hat einen Rastmoment. Die maximale Geschwindigkeit eines solchen Motors ist von der Gegen-EMK des Rotors begrenzt.
Figur 4 – Betrieb des Motors mit Permanentmagneten
1.3 Hybrid-Motoren
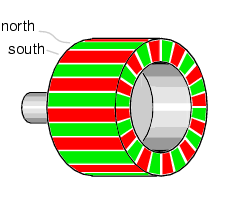
Ein Hybrid-Motor-Rotor ist in zwei Teile unterteilt, zwischen denen es einen zylindrischen Permanentmagnet gibt. Die Zahne der einen Halfte der Nordpol des Rotors, und die Zahne der anderen Halfte - Sud. Die Halften des Rotors sind zu einander um eine halbe Teilung des Winkels der Zahne positioniert. Die Anzahl der Polpaare des Rotors ist gleich der Anzahl der Zahne auf der einen Halfte.
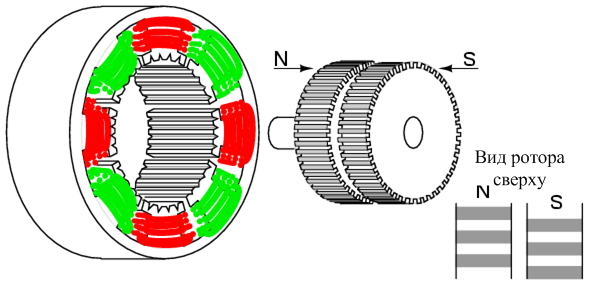
Figur 5 – Die Konstruktion eines Hybridantrieb
Figur 6 – Die Gestaltung des Rotors Hybridantrieb
Die haufigsten Schrittmotoren haben eine Anzahl der Schritte pro Umdrehung von 100 bis 500 (3,6° - 0,72° pro Schritt). Hybridantrieb kombiniert die Vorteile der ersten beiden Arten von Motoren: ein kleiner Schritt und ein gro?er Wendepunkt. Uber dem Bildschirm ist ein Permanentmagnet-Motor, aber mit einer Menge von Polen. Die Anzahl der Schritte pro Umdrehung ist proportional zur Anzahl der Stator-Phasen und der Anzahl der Pole (Zahne) Rotors. Im Moment ist dies die haufigste Art der Motoren.
Figur 7 – Arbeiten Hybridantrieb
Spater wird bei der Uberprufung der Arbeit der Schrittmotor betrachten die Zwei-Phasen-Schrittmotor mit Permanentmagneten mit zwei Polpaare des Stators und ein Paar von Polen auf dem Rotor.
1.4 Klassifizierung von Schrittmotoren nach der Speisung
Man unterscheidet der Motoren:
- Bipolare
- Unipolare
Figur 8 – Bipolar (1) unipolar (2) Motoren und Motor mit vier Wicklungen (3)
n jeder Phase haben bipolare Motoren eine Wicklung (Abb. 1), zur Anderung der Richtung des Magnetfeldes, muss man die Polaritat der Versorgungsspannung andern. Im Driver dieses Motors ist ein Bruckenkonverter erforderlich.
In unipolaren Motoren von der Mitte jeder Wicklung dem Schluss, dass ermoglicht das Umschalten Halfte der Windungen, um die Richtung des Magnetfeldes zu andern. Dies vereinfacht die Treiberschaltung, wie Jetzt gibt es keine Notwendigkeit, die Polaritat der Spannung zu andern. Man braucht nur vier einfachen Schlussel. Manchmal sind die unipolare Motoren haben vier getrennte Wicklungen. Jeder unipolaren Motor kann als bipolare Betrieb einfach verlassen, Schlussfolgerungen AB und CD unverbunden oder Kurzschlie?en A'B und C'D.
Drehmoment von dem Schrittmotor erzeugt wird, ist proportional zum magnetischen Feldes. Zur Erhohung des magnetischen Flusses ist notwendig, um die Anzahl der Umdrehungen erhohen oder den Strom. Frequency Unipolarmotor Problem, dass in jedem Augenblick nur halb Wicklung, die das Drehmoment reduziert.
1.5 Wege, um den Schrittmotor steuern
Man unterscheidet:
- Vollschrittmodus, ohne uberlappende Phasen
- Vollschrittmodus mit uberlappenden Phasen
- Halbschrittmodus
- Mikroschrittmodus
Vollschrittmodus, ohne uberlappende Phasen. In diesem Modus zu einem beliebigen Zeitpunkt nur eine Motorphase mit Strom versorgt. Rotorpols dazu neigt, eine Position gegenuber den erregten Wicklung einnehmen, abhangig von der Richtung des Stromflusses darin. Der Nachteil dieser Methode ist, geringeres Drehmoment.
Figur 9 – Diagramme Arbeit fur unipolare und bipolare Motoren
Vollschrittmodus mit uberlappenden Phasen. Ein charakteristisches Merkmal dieses Modus ist, dass gleichzeitig mit Strom zwei benachbarte Phasen versorgt werden und dass Rotor nicht am Gegenpole stoppt, sondern eine mittlere Position dazwischen einnimmt. Diese Methode bietet einen Schaltvorgang Phase in der Wurzel von zwei mal gro?er Moment. Wenn der Motor nicht wichtig ist stromlos seine Coil-Motor, Vollzeit bereitzustellen, wie es durch die halbe Steigung des Rotors und damit der Verlust der Zustand versetzt werden kann.
Figur 10 – Durchfluss Werke fur unipolare und bipolare Motoren
Halbschrittmodus ist eine Kombination der beiden oben genannten, d. h., stoppt der Rotor mit den entgegengesetzten Polen, und einer Zwischenposition zwischen diesen. Einerseits reduziert es Schritt zweimal, werden die anderen Rassen auftreten in dem Moment, so dass, wenn die beiden Phasen versorgt werden, dann ist der Moment die Wurzel von zwei mal gro?er ist. Um dieses Phanomen zu vermeiden, wenn die beiden Phasen enthalten sind, mussen sie zu einer Unterbewertung der Strom auch an der Wurzel der zwei Mal, aber es wird das gesamte Drehmoment zu reduzieren. Eines der Probleme des Halbschrittmodus ist auch ein Ubergang in einen Zustand mit einer einzigen Phase geschaltet. Die Tatsache, dass es notwendig ist, so schnell wie moglich zu reduzieren, in einer schaltbaren Phasenstrom Null. Zum Beispiel wird mit der H-Brucke aus alle Schlussel, die dazu fuhrt, ausgefuhrt, dass eine gro?e Entlastung Strom durch die Dioden und der Stromquelle. Wenn Sie einen Schlussel geschlossen lassen, die Entlastung Schaltung eine Diode und einen Schlussel enthalten, so wird der Strom langsam abklingen.
Figur 11 – Schematische Darstellung der Arbeit fur die unipolare Motor
Figur 12 – Diagramm des Motors fur eine bipolare
Mikroschrittmodus. Halbschrittmodus ist ein spezieller Fall von Microstepping. Durch Variation des Verhaltnisses der Strome in den Phasen des Motors erreichen kann jede Position des Rotors zwischen benachbarten Polen. Zu den Drehimpuls konstant bleibt, muss die Amplitude der Momente durch jede Phase erzeugt aus der Beziehung M21max+ M22max = M2n gewahlt werden. Die Diagramme sind Beispiele fur solche Beziehungen.
Figur 13 – Ein Schrittmotor Drehmoment in Abhangigkeit von dem Drehwinkel wird der Rotor in Bezug auf die Phase B (1) verschoben: (1) - 30°, (2) - 22,5°, (3) - 15°
Die Abhangigkeit des Verhaltnisses der Amplituden der Momente des Drehwinkels an der Stange der nachsten Phase - die Kennlinie ist nicht linear. Koordinaten des Punktes des Gleichgewichts werden wie folgt berechnet:
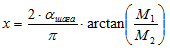
Es ist daher moglich, den Rotor an einer beliebigen Position zu fixieren.
Figur 14 – Die Beziehung zwischen dem Drehwinkel des Rotors von dem Verhaltnis der Momente
1.6 Leistungsregelung des Schrittmotors
Fur unipolar Motorsteuerung mit zwei Tasten fur jede Phase, die den Stromfluss in jeder Halfte der Wicklungen vorgesehen ist. Zusatzliche Dioden Regelung unipolaren Leistungsquelle erforderlich, weil die Halfte Wicklungen auf einem gemeinsamen Kern und eng miteinander verbunden sind, damit sie arbeiten als Spartransformator und eine Spannungsspitzen auftreten, auf beiden Enden der Wicklungen. Um jede Wicklung bipolar Motor liefern erfordert H-Brucke. Es liefert einen Strom in sowohl vorwarts als auch ruckwarts flie?en. Die Entladung flie?t wahrend schlangelt sich durch die Dioden und Netzteil. Key-Management-H-??Brucke mussen sicherstellen, dass nicht auch die beiden Tasten gleichzeitig eine Schulter, einen Kurzschluss verursachen.
Figur 15 – Die Richtung der Strome in den Spannungswandler
Da die Motorwicklung eine Induktivitat der Strom in sie nicht sofort andern, wenn daher darauf aufgebrachten rechteckformigen Spannungsimpuls, wird die aktuelle eine andere Form aufweisen. Bei niedriger Geschwindigkeit, wird dieses Phanomen nicht stark beeinflussen den Moment. Bei hoheren Geschwindigkeiten kann der Strom nicht einmal ihren Hohepunkt erreichen, zyklische Crescendo und Fallenlassen. Es ist daher zu der Anfangszeit, um den Pegel der Versorgungsspannung zu erhohen, um die schnellste Geschwindigkeit des Anstiegs des Stroms sicherzustellen erforderlich. Zusatzlich zu den verschiedenen Betriebsarten ist notwendig, um aktuelle Sollwert in den Motor-Phasen zu halten ist daher angebracht, die aktuelle Controller verwenden. Fur diese Zwecke geeignete bemerkenswert Relaissteuerung, die einen vorbestimmten Stromwert in seiner Lage halt. Wenn die aktuelle versucht, die angegebene "Korridor" verlassen, wird die Schaltspannung umgekehrt, was zu einer Abnahme (Zunahme oder, abhangig von der vorherigen Zeichen di/dt) Strom. Folglich wandte die Motorspannung Stufe ±Uп. Je hoher der Elastizitatsmodul, desto gro?er ist die Rate der Stromanstieg vorgesehen sein.
Figur 16 – Spannungsteuerung
Figur 17 – Stromsteuerung
Figur 18 – Mikroschrittmodus
Wobei die Bedienung Schrittmotor vom Fahrer getragen. Er muss die folgenden Aufgaben erledigen:
- Ein-und Ausschalten des Stroms in den Wicklungen, und auch Anderung seiner Richtung;
- die aktuelle Sollwert zu pflegen;
- den bestmoglichen schnellen Aufstieg und Fall der Spannung fur eine gute Beschleunigung leisten.
Figur 19 – Blockschaltbild der Schrittmotor
1.7 Start eines Schrittmotors. Die Resonanz des Schrittmotors
Beginnend mit einer Schaltfrequenz von der Phase, mit der beginnt, stark zu verringern. Dies macht es schwierig, in hohen Geschwindigkeiten. Fur Schrittmotoren ist die folgende Beziehung, die eine Hochstgeschwindigkeit von Grundung und den Betrieb zu einem bestimmten Zeitpunkt angezeigt. Sie mussen zuerst aus dem Startbereich beginnen und dann "fahren" den Motor auf die gewunschte Geschwindigkeit. Gebremst wird in umgekehrter Reihenfolge. Wenn Sie mit einer hoheren Geschwindigkeit zu starten, wird es uberspringen Sie die Schritte.
Figur 20 – Die Beziehung zwischen dem Zeitpunkt der Schaltfrequenz
Bei einem Schritt macht der Rotor des Motors gedampfte Schwingungen. Folglich kann man das System der Stator - das Magnetfeld - der Rotor als einen Federpendel betrachten, den die Frequenz der Schwingung charakterisiert. Dies ist die Resonanzfrequenz. Bei dieser Frequenz ist die Phasenumschaltung der Zeit Null, also sie soll bei der Bedienung vermieden werden.
wo N - die Anzahl der Schritte pro Umdrehung des Motors ist. Es ist zu erkennen, dass die Resonanzfrequenz von dem Tragheitsmoment der Belastung abhangt, wobei je hoher die Belastung ist, desto niedriger ist die Frequenz.
Vorschlage gegen Resonanz:
- Die Verwendung von speziellen Kupplungen aufgrund einer Belastung
- Kurzschluss von unbenutzten Wicklungen
- Die Verwendung von Algorithmen, in denen die gro?te Anzahl der Phasen benutzt wird
- Der Einsatz vom Mikroschrittmodus
2. Der Gleichstrommotor
Gleichstrommaschine ist eine elektrische Maschine zur Umwandlung von mechanischer Energie in elektrische Gleichstrom (Generator) oder umgekehrt (Motor).
Arbeitsweise. Die Maschine hat eine DC-Feldwicklung auf den vorspringenden Polen angeordnet. Die Wicklung Konstantstrom (Erregerstrom) erzeugt ein Magnetfeld, Anregung. Der Rotor ist eine zweischichtige Wicklung, bei dem die Drehung des Rotors ein Wechselfeld EMF induziert. Mit Hilfe der Elektromaschine - eines Kollektoren, wird dies durch die EMF gleichgerichtet. Fur eine gegebene Drehrichtung des Ankers emf in den Leitern induziert wird, hangt es von der Stange, die unter einer Leiter befindet, so dass in allen Leitern, die unter dem gleichen Pol sind, die EMF Richtung gleich und unabhangig von der Geschwindigkeit ist.
Figur 21 – Die Arbeit der DC-Motor
Strukturell besteht die Gleichstrom-Maschine aus einem Stator (mit einer Feldwicklung), dem Rotor (Anker) und dem Burste-Kollektor-System (Umwandlung einer variablen Spannung in konstante Spannung oder umgekehrt).
Nach der Methode der elektrischen Verbindung der Wicklung werden DC-Motoren in unabhangige, parallele, serielle und mit gemischter Anregung unterteilt. Das Verfahren zum Wickeln von Verbindungen beeinflusst die Form der statischen und dynamischen Eigenschaften.
Figur 22 – Anschluss-Schema der Wicklungen des Gleichstrommotors
Am meisten werden die Gleichstrommotoren mit separatem Anregung verwendet. Ein besonderes Merkmal ist die Moglichkeit der Trennung des Ankerstroms (Steuerung des ersten Bereichs unterhalb der Leerlaufdrehzahl) und des magnetischen Flusses (die zweite Zone oberhalb der Leerlaufdrehzahl). Unter Verwendung der Gleichung der Ankerkette, Exprimieren des EMF davon, und dividiert durch das Produkt aus dem magnetischen Fluss konstant und konstruktiv, so erhalt man statische mechanische Eigenschaften.
Daraus ist deutlich zu erkennen, dass die Motordrehzahl in dreierlei Hinsicht geandert werden kann - durch Anderung der Ankerspannung, die Anderung des magnetischen Flusses, die Einfuhrung von zusatzlichen Widerstanden. Verordnung durch die Einfuhrung von zusatzlichem Widerstand ist extrem ineffizient aufgrund der verringerten Effizienz und der Notwendigkeit fur High-Power-Widerstande, die eine ordnungsgema?e Kuhlung erfordern. Daher wird dieses Steuerverfahren nicht behandelt. Es ist zu erkennen, dass die Eigenschaften der Feldschwachung eine unterschiedliche Steifigkeit aufweisen, die kleiner als die der naturlichen mechanischen Eigenschaften sind.
Figur 23 – Drehzahlregelung durch Variieren der Spannung
Figur 24 – Veranderung der Drehzahl Ankerwiderstand
Figur 25 – Drehzahlregelung Schwachung des Magnetflusses
Figur 26 – Gesetze, die die Geschwindigkeit der ersten und zweiten Zone
DC Maschine kann in dem Motor (Motordrehzahl unterhalb der Leerlaufdrehzahl) und einem Generator (oberhalb der Leerlaufdrehzahl)-Modus arbeiten, so dass Energie an das Netzwerk eingespeist wird.
Die Bewegung wird umgekehrt entweder durch eine Anderung der Richtung des Ankerstroms oder durch die Anderung der Richtung des Erregerstromes.
2.1 Bremsbetrieb des Gleichstrommotors
Bremsen konnen in den folgenden Arten erfolgen:
- Regeneratie Bremsen
- Gegenschaltung
- Dynamische Bremsen
Regenerative Bremsen werden beim Ubergang zu einer geringeren Geschwindigkeit eingesetzt. Wenn die Spannung und somit die elektromotorische Kraft nicht sofort andern, verursacht es, dass die Stromrichtung umkehrt und beginnt, von dem Motor mit einer Spannungsquelle zu flie?en.
Figur 27 – Regenerativmodus
Plugging wird aktiviert durch Umschalten der Polaritat der Ankerspannung und der Einfuhrung in die Kette des zusatzlichen Widerstandes. Nach Erreichen des Punktes 3 ??muss man den Motor trennen, und je nachdem, welche Punktlasten angebracht sind, die mechanische Bremse benutzen.
Figur 28 – Gegenschaltung
Dynamische Bremsen funktionieren durch die Schlie?ung des Motorankers fur zusatzlichen Widerstand. Mit dem aktiven Lastmoment muss auch eine mechanische Bremse bei Drehzahl Null verhangen.
Figur 29 – Dynamische Bremsen
2.2 Das System der Slave-Steuerung der Winkelgeschwindigkeit.
Wie aus den statischen mechanischen Eigenschaften zu sehen ist, mit der Zeit verringert sich die Winkelgeschwindigkeit, was nicht hinnehmbar in Anwendungen ist, bei denen eine prazise Steuerung erforderlich ist, um die gleiche Drehzahl und Drehmoment bei unterschiedlichen Geschwindigkeiten zu gewahrleisten. Zu diesem Zweck kann das Steuersystem mit der geschlossenen Schleife oder der elektromotorischen Kraft / Spannung, die Inanspruchnahme Geschwindigkeit durch Erhohen der Ankerspannung oder die Abschwachung des Magnetfeldes in Abhangigkeit von der Verstellung kompensiert werden.
Verordnung Winkelgeschwindigkeit Anker. Die Gleichung der Ankerkette, die Zeitgleichung, EMF und zweite Newtonsche Gesetz fur Drehbewegung, und gehen wir uber zur Betreiber-Notation, finden dann die Transfer-Funktion und bilden das Blockschaltbild.
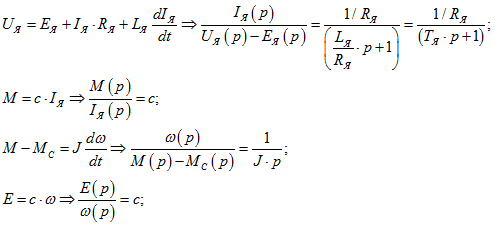
Bei Kalkulation der aktuellen Controller und Geschwindigkeit, berucksichtigen wir die Wirkung von Back-EMF nicht.
Das Wesen der Anpassung - Umsetzung der PD-Regler mit Feedback zu dem Produkt aus der Fermi-Flache des vorderen Zweig und Aste Betrieb Schleife.
Fur die aktuelle Schleife:
aber da die Tragheit des Wandlers nicht kompensiert werden kann, schlie?en wir sie aus der Synthese. Da in der Schleife des Stroms die Storung vorhanden ist, und es ist notwendig, dass astatic Stromregler PI-Typen sein muss, aber auf der Grundlage des oben genannten bekommen wir PD PD:
urch Multiplikation der PF an den Integrator erhaltene ZeitkonstanteTт erhalten wir die gewunschte PF:
Die Ubertragungsfunktion der Stromschleife:
Figur 30 – Blockschaltbild des Regelkreises aktuellen
Figur 31 – Block Diagramm des Drehzahl-Regelkreises
Ebenso wird die Drehzahl-Regelkreis konfiguriert. Als Ergebnis erhalt man PF Regler und ein Blockschaltbild des gesamten Systems:
Figur 32 – Blockschaltbild des gesamten Systems
Da der Zweck der weiteren Forschung DC-Motoren mit geringer Leistung, die mit permanent erregten durchgefuhrt sind, wird die Regelung der Geschwindigkeit der zweiten Zone nicht berucksichtigt.
3. Reversibel Gleichspannungswandler (H-Brucke)
H-Brucke ist eine elektronische Schaltung, die eine Spannung auf eine Last in unterschiedlichen Richtungen ermoglicht.
Beim Schlie?en des K1-K4 wird die Last positiven Spannungsversorgung angelegt, andernfalls wird beim Schlie?en des K2-K3 die Last negativen Spannungsversorgung angelegt.
Dioden, die parallel zu den Tasten montiert sind, gewahrleisten einen Pfad fur den Ruckstrom der induktiven Lasten. Bei Nichtbenutzung wird das Klemmen Spannungsspitzen auftreten, dass bei der Nutzung von den Halbleiterschaltern zum Versagen fuhren wird.
Die schnelle Abnahme vom Strom tritt auf, wenn alle Tasten ausgeschaltet sind und Strom durch die Dioden D2-D3 flie?t. Diese Methode eignet sich zur Steuerung des Stroms in den Wicklungen der Schrittmotoren, wenn man aus dem Zustand mit zwei Wicklungen in den Zustand mit einer eingeschalteten ubergehen will.
Wenn man das Telefon Schlussel K1 lassen will, dann wird der Stromfluss durch die Schaltung D2-K1 und der Strom langsam nachlassen. Diese Option ist am besten geeignet fur PWM-Spannung Steuerung mit einem DC-Motor.
Figur 33 – Blockschaltbild des Senders
Puls-Weiten-Modulation (PWM) steuert den Mittelwert der Spannung an der Last durch Veranderung des Tastverhaltnisses, das den Schlussel regelt.
Figur 34 – Betrieb eines PWM
Zum Beispiel auf dem Schaltbild des Gleichstrommotors konnen wir sehen, dass seine Ankerkette eine aktiv-induktive Last darstellt. Daher kann der Ankerstrom nicht sofort geandert werden, und es wird einen Ubergang geben. Daher konnen alternierende Impulse und Pausen die gleiche Wirkung haben, als ob der Anker durch eine Gleichspannung versorgt wird. Die Grafik zeigt deutlich, dass, trotz Schwankungen in der Spannung, Strom nur um eine kleine Prozentzahl geandert wird, und es keinen signifikanten Einfluss auf den Moment hat.
Figur 35 – Die transienten Strom
Befund
Beim Schreiben dieses Aufsatzes Master-Arbeit ist noch nicht abgeschlossen. Die endgultige Fertigstellung: Dezember 2014. Der vollstandige Text der Arbeit und Materialien zum Thema kann vom Autor oder seinem Manager nach diesem Zeitpunkt erhalten werden. Dieser Teil des Aufsatzes nur Sightseeing. Weitere Arbeiten werden im experimentellen Forschung DC Antriebe und Gerate, sie in sich selbst gerichtet sein.
Schriftenverzeichnis
- Емельянов А.В. Шаговые двигатели: учеб. пособие/ А.В. Емельянов, А.Н. Шилин/ВолгГТУ. - Волгоград, 2005. - 48 с.
- Tony R. Kuphaldt. Lessons In Electric Circuits, Volume II – AC, Sixth Edition, 2007. - 561 с.
- Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины: Учеб. для электротехн. спец. вузов. - 3-е изд., перераб. и доп. - М.: Высш. шк., 1990. - 528 с.
- Дискретный электропривод с шаговыми двигателями. Под общ. ред. М.Г. Чиликина. М., «Энергия», 1971. - 624 c.
- Ion Boldea. Electric drives. — Lexington, KY, USA — 2005, - 549 с.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. - М.: Энергоиздат, 1981. - 576 с.
- Теория электропривода, ч.1: учебное пособие / Сост.: А.Б.Зеленов – Алчевск, ДонГТУ, 2005. – 382 с.
- Matlab R2013a documentation center [электронный ресурс].–Режим доступа: www.mathworks.com