
Реферат за темою випускної роботи
Зміст
- Введення
- 1. Кроковий двигун
- 1.1 Двигуни зі змінним магнітним опором
- 1.2 Двигуни з постійними магнітами
- 1.3 Гібридні двигуни
- 1.4 Класифікація крокових двигунів за способом живлення
- 1.5 Способи управління кроковим двигуном
- 1.6 Управління живленням крокового двигуна
- 1.7 Пуск крокової двигуна. Явище резонансу
- 2. Двигун постійного струму
- 2.1 Гальмівні режими ДПC
- 2.2 Система підпорядкованого регулювання кутової швидкості
- 3. Понижуючий реверсивний перетворювач постійного струму в постійний (H-міст)
- Висновки
- Перелік посилань
Введення
У сучасному світі неможливо обійтися без електроприводу. Життя б серйозно ускладнилося, якщо не було би в будинку ліфта. Без електпропрівода важко собі уявити системи охолодження. Якщо переходити від загального до приватного, то двигуни постійного струму застосовуються в наступних пристроях і системах:
- Крани різних важких виробництв
- Привід, з вимогами регулювання швидкості в широкому діапазоні і з високим пусковим моментом
- Тяговий електропривод тепловозів, електровозів, теплоходів, кар'єрних самоскидів і пр.
- Стартери автомобілів, тракторів та ін.
Крокові електродвигуни застосовуються в приводах машин і механізмів, що працюють в старт-стопному режимі, або в приводах безперервного руху, де керуючий вплив задається послідовністю електричних імпульсів, наприклад, у верстатах з ЧПК. На відміну від сервоприводів, крокові приводи дозволяють отримувати прецензійне позиціонування без використання зворотного зв'язку, тобто без датчиків кутового положення. Крокові двигуни застосовуються в пристроях комп'ютерної пам'яті - НГМД, НЖМД, пристроях читання оптичних дисків.
Якщо брати до уваги мікромашини, то найбільш зручним засобом забезпечення живлення можна назвати реверсивний імпульстний перетворювач постійного струму в постійний, силова схема якого отримала назву H-міст
1. Кроковий двигун
Кроковий двигун - безколекторний електродвигун постійного струму, що перетворює сигнал керування в кутове переміщення ротора з можливою його подальшою фіксацією.
Позитивні якості крокової двигуна:
- Кут повороту ротора визначається числом імпульсів, які подані на драйвер, немає необхідності у зворотному зв'язку, а швидкість пропорційна частоті вхідних імпульсів
- Точне позиціонування і повторюваність, помилка не накопичується від кроку до кроку
- Швидкий старт / реверс
- ожливість отримання низьких швидкостей і, отже, відсутня необхідність у застосуванні редуктора
- Відсутність колектора, отже, висока надійність
- У двигунах з постійними магнітами мається фіксуючий момент (коли статор знеструмлений), рівний приблизно 10% від моменту утримання
Недоліки:
- Номінальне споживання енергії, навіть без навантаження
- Можливий пропуск кроку, отже, втрата контролю положення
- Явище резонансу (момент дорівнює нулю на частоті резонансу)
- Ускладнена робота на високих швидкостях, внаслідок не миттєвого наростання струму
По конструкції крокові двигуни діляться на три основні типи:
- Двигуни зі змінним магнітним опором
- Двигуни з постійними магнітами
- Гібридні двигуни
1.1 Двигуни зі змінним магнітним опором
Дані двигуни мають кілька полюсів на статорі і ротор зубчастої форми з магнітом'якого матеріалу. Намагніченість ротора відсутня.
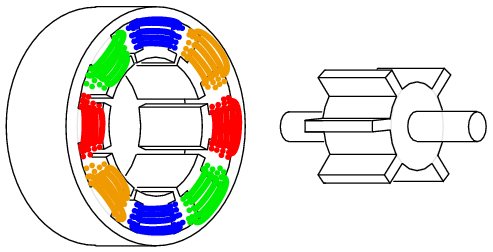
Рисунок 1 – Конструкція двигуна зі змінним магнітним опором
На анімації зображений кроковий двигун з шістьма полюсами на статорі і чотирма на роторі і має 3 незалежні статорні обмотки. Такий двигун має крок 30°. При протіканні струму через одну з обмоток, ротор прагне зайняти положення напроти відповідних їй полюсів. Для зміни положення ротора необхідно знеструмити поточну обмотку і підключити до живлення наступну. Наприклад, використовуючи послідовність обмоток 1-2-3, ротор буде обертатися в прямому напрямку. Навпаки, використовуючи послідовність 1-3-2, ротор буде обертатися в зворотньому напрямку. Даний тип двигуна нечутливий до напрямку протікання струму в обмотках. Внаслідок відсутності намагнеченості ротора, не має фіксуючого моменту і забезпечує менший робочий момент у порівнянні з іншими типами крокових двигунів.
Рисунок 2 – Робота двигуна зі змінним магнітним опором
1.2 Двигуни з постійними магнітами
Конструкція статора даного типу двигунів мало чим відрізняється від конструкції двигунів зі змінним магнітним опором. Головна відмінність в роторі, він містить постійні магніти. Полюса ротора, що чергуються, мають прямолінійну форму і розташовані паралельно осі двигуна.
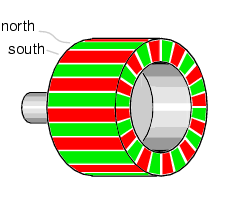
Рисунок 3 – Конструкція ротора двигуна з постійними магнітами
На анімації наведено двофазний двигун, що має три пари полюсів ротора і дві пари полюсів статора, що дозволяє забезпечити аналогічно попередньому прикладу розмір кроку 30°. Для обертання проти годинникової стрілки необхідно використовувати наступну послідовність комутації фаз (+1)-(+2)-(-1)-(-2), відповідно за годинниковою (+1)-(-2)-(-1)-(+2). Внаслідок намагнеченості ротора, даний тип двигунів забезпечує більший момент у порівнянні з двигуном із змінним магнітним опором, а також має фіксуючий момент. Максимальна швидкість цього типу двигунів обмежується зворотного ЕРС з боку ротора.
Рисунок 4 – Робота двигуна з постійними магнітами
1.3 Гібридні двигуни
У гібридного двигуна ротор розділений на дві частини, між якими розташований циліндричний постійний магніт. Зубці однієї половини ротора є північними полюсами, а зубці іншої половини - південними. Половини ротора повернені один відносно одного на половину кута кроку зубців. Число пар полюсів ротора дорівнює кількості зубців на одній з його половин.
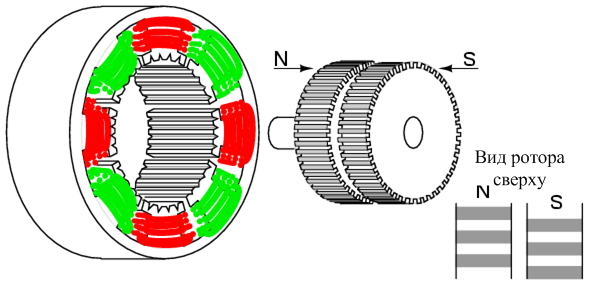
Рисунок 5 – Конструкція гібридного двигуна
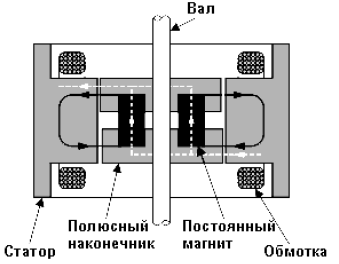
Рисунок 6 – Конструкція ротора гібридного двигуна
Найбільш поширені крокові двигуни з числом кроків на оборот від 100 до 500 (3,6° - 0,72° на один крок). Гібридний двигун поєднує переваги перших двох типів двигунів: малий крок повороту і великий момент. По суті це двигун з постійними магнітами, але з великою кількістю полюсів. Кількість кроків на оборот пропорційно кількості фаз статора та кількістю полюсів (зубців) ротора. В даний момент цей тип двигуна найбільш поширений.
Рисунок 7 – Робота гібридного двигуна
Надалі при розгляді роботи крокової двигуна будемо розглядати двофазний кроковий двигун з постійними магнітами, з двома парами полюсів на статорі і однією парою полюсів на роторі.
1.4 Класифікація крокових двигунів за способом живлення
Розрізняють двигуни:
- Біполярні
- Уніполярні
Рисунок 8 – Біполярний (1), уніполярний (2) і чотирьохобмотковий (3) двигуни
У біполярних двигунах кожна фаза має одну обмотку (рис. 8.1), отже, для зміни напрямку магнітного поля необхідно змінювати полярність напруги живлення. У дрвайвері такого двигуна необхідно використовувати мостовий перетворювач.
В уніполярних двигунах з середини кожної обмотки зроблений вивід, що дозволяє перемиканням половин обмоток змінювати напрямок магнітного поля. Це спрощує схему драйвера, тому що тепер немає необхідності зміни полярності напруги. Достатньо лише використовувати чотири простих ключа. Іноді уніполярні двигуни мають чотири роздільних обмотки. Будь який уніполярний двигун може працювати як біполярний, просто треба залишити виводи AB і CD непідключеними або закоротити виводи A'B і C'D.
Момент, що створює кроковий двигун, пропорційний його магнітному полю. Щоб збільшити магнітний потік необхідно збільшити число витків або збільшити струм. Проблемою використання уніполярного двигуна є те, що в кожен момент часу використовується тільки половина обмотки, що призводить до зниження моменту.
1.5 Способи управління кроковим двигуном
Розрізняють:
- Повнокроковий режим без перекриття фаз
- Повнокроковий режим з перекриттям фаз
- Напівкроковий режим
- Мікрокроковий режим
Повнокроковий режим без перекриття фаз. У цьому режимі в один момент часу отримує живлення тільки одна фаза двигуна. Полюса ротора прагнуть зайняти положення навпроти обмотки, що живиться, залежно від напрямку протікання струму в ній. Недоліком даного способу є менший момент двигуна.
Рисунок 9 – Діаграми роботи для уніполярного та біполярного двигунів
Повнокроковий режим з перекриттям фаз. Характерною рисою даного режиму є те, що одночасно отримують живлення дві суміжні фази і ротор зупиняється не навпроти полюсів, а в проміжному положенні між ними. Даний спосіб комутації фаз забезпечує в корінь з двох разів більший момент. При зупинці двигуна важливо не знеструмлювати його обмотки, щоб двигун забезпечував повний момент, бо може статися зсув ротора на половину кроку і відповідно втрата положення.
Рисунок 10 – Діаграми роботи для уніполярного та біполярного двигунів
Напівкроковий режим є комбінацією двох вищеназваних, тобто ротор зупиняється як навпроти полюсів, так і в проміжному положенні між ними. З одного боку це дозволяє зменшити крок у два рази, з іншого будуть мати місце коливання моменту, бо коли дві фази отримують живлення, то момент буде в корінь з двох разів більше. Щоб уникнути цього явища, в момент, коли включені дві фази, необхідно занижувати на них струм теж у корінь з двох разів, але це призведе до загального зменшення моменту. Однією з проблем напівкрокового режиму також є перехід в стан з однією включеної фазою. Справа в тому, що потрібно якомога швидше звести в фазі, що вимикається, струм до нуля. Наприклад, використовуючи H-міст, це здійснюється вимиканням всіх ключів, що призводить до того, що великий розрядний струм тече через діоди і джерело живлення. Якщо ж залишити один ключ замкненим, то контур розряду буде включати в себе діод і ключ, тому струм буде спадати повільніше.
Рисунок 11 – Діаграма роботи для уніполярного двигуна
Рисунок 12 – Діаграма роботи для біполярного двигуна
Мікрокроковий режим. Напівкроковий режим є окремим випадком мікрокрокового. Змінюючи співвідношення струмів у фазах двигуна, можна досягти будь-якого положення ротора між сусідніми полюсами. Щоб сумарний момент залишався постійною величиною, амплітуди моментів, створювані кожною фазою, повинні вибиратися зі співвідношення M21max+ M22max = M2ном. На графіках наведені приклади таких співвідношень.
Рисунок 13 – Момент крокового двигуна у функції кута повороту, ротор зміщений щодо фази B на: (1) - 30°, (2) - 22,5°, (3) - 15°
Залежність співвідношень амплітуд моментів від кута повороту до полюса наступної фази - характеристика не лінійна. Координати точки рівноваги розраховуються як:
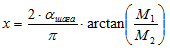
Отже, можливо фіксувати ротор у будь-якій довільній позиції.
Рисунок 14 – Залежність кута повороту ротора від співвідношення моментів
1.6 Управління живленням крокового двигуна
Для управління уніполярним двигуном достатньо двох ключів на фазу, які забезпечують протікання струму в кожній з половин обмоток. Додаткові діоди в схемі з уніполярним живленням необхідні через те, що половини обмоток знаходяться на загальному сердечнику і тісно пов'язані одина з одною, отже, вони працюють як автотрансформатор і викиди напруги виникають на виводах обох обмоток. Для живлення кожної обмотки біполярних двигунів необхідний H-міст. Він забезпечує протікання струму, як у прямому, так і зворотному напрямку. Розрядний струм обмотки при цьому протікає через діоди і джерело живлення. При управлінні ключами H-мосту необхідно переконається, щоб не були включені одночасно два ключі одного плеча, що призведе до короткого замикання.
Рисунок 15 – Напрямок протікання струмів в перетворювачі напруги
Так як обмотка двигуна містить індуктивність, то струм в ній не може змінитися миттєво, отже, якщо прикладати до неї імпульси напруги прямокутної форми, то струм буде мати іншу форму. На низькій швидкості це явище не буде сильно впливати на момент. На високій швидкості струм може навіть не досягати свого максимуму, циклічно наростаючи і спадаючи. Тому необхідно в початковий момент часу підвищити рівень напруги, що подається, для забезпечення максимально швидкого темпу наростання струму. Крім того для різних режимів роботи необхідно підтримувати заданиі значення струму у фазах двигуна, тому доцільно застосування регулятора струму. Для цих цілей чудово підходить релейний регулятор, який підтримує задане значення струму в межах своєї уставки. Якщо струм намагається покинути заданий «коридор», то відбувається перемикання значення напруги на протилежне, що призводить до зменшення (або збільшення, залежно від попереднього знака di/dt) струму. Отже, до двигуна прикладається два рівня напруги ±Uп. І чим вище її модуль, тим більший темп наростання струму можна забезпечити.
Рисунок 16 – Управління напругою
Рисунок 17 – Управління струмом
Рисунок 18 – Мікрошаговий режим
Всі функції управлінням кроковим двигуном лягають на драйвер. Він повинен вирішувати такі завдання:
- мати можливість включати і вимикати струм в обмотках, а також змінювати його напрямок;
- підтримувати задание значення струму;
- забезпечувати якомога більш швидке наростання і спад струму для хороших швидкісних характеристик.
Рисунок 19 – Функціональна схема системи управління кроковим двигуном
1.7 Пуск крокової двигуна. Явище резонансу
Починаючи з деякої частоти комутації фаз, момент починає різко зменшуватися. Це ускладнює пуск на високих швидкостях. Для крокових двигунів наводиться така залежність, яка відображає максимальну швидкість пуску і роботи при заданому моменті. Спочатку необхідно виконати запуск з області старту і далі «розігнати» двигун до потрібної швидкості. Гальмування виконується у зворотному порядку. Якщо ж спробувати стартувати на більшій швидкості, то це призведе до пропуску кроків.
Рисунок 20 – Залежність моменту від частоти комутації
Резонанс крокового двигуна. Роблячи крок, ротор двигуна здійснює затухаючі коливання. Отже, систему статор - магнітне поле - ротор можна розглядати як пружинний маятник, який характеризує частота коливань. Ця частота і є резонансною. На цій частоті комутації фаз момент буде дорівнювати нулю, отже, при роботі її потрібно уникати.
де, N - число кроків на оборот двигуна. Як бачимо, резонансна частота залежить він моменту інерції навантаження, причому, чим більше навантаження, тим менше частота резонансу.
Способи боротьби з резонансом:
- Застосування спеціальних муфт зв'язку з навантаженням
- Замикання накоротко невикористовуваних обмоток
- Використання алгоритмів роботи, за яких одночасно використовується найбільше число фаз
- Застосування мікрокрокового режиму
2. Двигун постійного струму
Машина постійного струму - електрична машина, призначена для перетворення механічної енергії в електричну постійного струму (генератор) або для зворотного перетворення (двигун).
Принцип дії. Машина постійного струму має обмотку збудження, розташовану на явно виражених полюсах. Через обмотку протікає постійний струм (струм збудження), що створює магнітне поле збудження. На роторі розташована двошарова обмотка, в якій при обертанні ротора індукується змінна ЕРС. За допомогою механічного перетворювача енергії - колектора, ця ЕРС випрямляється. При заданому напрямку обертання якоря напрямок ЕРС, індукований в його провідниках залежить від того, під яким полюсом цей провідник знаходиться, тому у всіх провідниках, розташованих під одним полюсом, напрям ЕРС однаковий і зберігається таким незалежно від частоти обертання.
Рисунок 21 – Робота двигуна постійного струму
Конструктивно машина постійного струму складається зі статора (на якому знаходиться обмотка збудження), ротора (якоря) і щітково-колекторного апарату (перетворення змінної ЕРС в постійну напругу або навпаки).
За способом електричного з'єднання обмоток двигуни постійного струму бувають незалежного, паралельного, послідовного і змішаного збудження. Спосіб з'єднання обмоток впливає на вигляд статичних і динамічних характеристик.
Рисунок 22 – Cхеми з'єднання обмоток ДПС
Найбільшого поширення набули ДПС з незалежним збудженням. Відмінною їх рисою є можливість роздільного управління струмом якоря (управління в першій зоні, нижче швидкості холостого ходу) і магнітним потоком (у другій зоні, вище швидкості холостого ходу). Використовуючи рівняння якірного кола, виразивши з нього ЕРС і розділивши на добуток магнітного потоку і конструктивної постійної, одержимо рівняння механічної статичної характеристики:
З нього добре видно, що швидкість двигуна можна змінити трьома способами - зміною напруги якоря, зміною магнітного потоку, введенням додаткових опорів. Регулювання за допомогою введення додаткових опорів вкрай неефективно, зважаючи на зменшення ККД і необхідності в потужних резисторах, що вимагають гарного охолодження. Тому даний спосіб регулювання розглянуто не буде. При цьому можна помітити, що характеристики отримані послабленням поля мають різну жорсткість, яка менше ніж у природної механічної характеристики.
Рисунок 23 – Регулювання швидкості зміною напруги
Рисунок 24 – Регулювання швидкості зміною опору якоря
Рисунок 25 – Регулювання швидкості послабленням магнітного потоку
Рисунок 26 – Закони регулювання швидкості в першій і другій зонах
Машина постійного струму може працювати як в руховому (швидкість двигуна нижче швидкості холостого ходу), так і в генераторному (вище швидкості холостого ходу) режимі, віддаючи енергію в мережу.
Реверс здійснюється або зміною напрямку струму якоря, або зміною напрямку струму збудження.
2.1 Гальмівні режими ДПТ
Гальмування можна здійснювати такими способами:
- Генераторне гальмування
- Гальмування противмиканням
- Динамічне гальмування
Генераторне гальмування (рекуперативне) - таке гальмування застосовується при переході на більш низьку швидкість. При зниженні напруги швидкість і відповідно ЕРС не можуть миттєво змінитися, це призводить до того, що струм змінює напрямок і починає протікати від двигуна до джерела напруги.
Рисунок 27 – Генераторне гальмування
Гальмування противмиканням проводиться шляхом перемикання полярності напруги якоря і введенням в його коло додаткового опору. По досягненні точки 3 необхідно знеструмити двигун і, залежно від того який момент навантаження прикладений, накласти механічний гальмо.
Рисунок 28 – Гальмування противмиканням
Динамічне гальмування здійснюється замиканням якоря двигуна на додатковий опір. При активному моменті навантаження необхідно також накласти механічний гальмо при нульовій швидкості.
Рисунок 29 – Динамічне гальмування
2.2 Система підпорядкованого регулювання кутової швидкості
Як видно з статичних механічних характеристик, із зростанням моменту кутова швидкість зменшується, що неприпустимо в пристроях, де необхідне точне регулювання швидкості та забезпечення однакового моменту на різних швидкостях. Для цих цілей застосовують замкнені системи регулювання із зворотним зв'язком за швидкостю або ЕРС/напругою, що компенсують просідання швидкісті шляхом підняття напруги якоря або послабленням магнітного поля, в залежності від зони регулювання.
Регулювання кутової швидкості по колу якоря. Запишемо рівняння якірного ланцюга, рівняння моменту, ЕРС а також другий закон Ньютона для обертального руху, і, перейшовши в операторну форму запису, знайдемо передатні функції і складемо структурну схему.
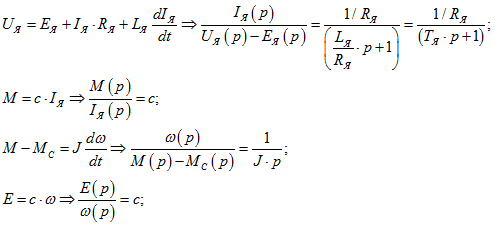
Розраховуючи регулятори струму і швидкості, нехтуємо впливом проти-ЕРС, вважаючи його незначним.
Суть налаштування - реалізація регулятора з ПФ зворотньою добутку ПФ прямої гілки і гілки ЗЗ контуру регулювання.
Для контуру струму:
Але так як інерційність перетворювача неможливо скомпенсувати, ми її виключаємо з синтезу. Так як в контурі струму присутнє зобурення, а його необхідно виконати астатичним, отже, регулятор струму повинен бути ПІ типу, але, виходячи з вище сказаного, отримуємо ПД ПФ.
Помноживши отриману ПФ на інтегратор зі сталою часу Tт отримаємо шукану ПФ:
Передатна функція всього контуру струму:
Рисунок 30 – Структурна схема контуру регулювання струму
Рисунок 31 – Структурна схема контуру регулювання швидкості
Аналогічно виконується настройка контуру регулювання швидкості. У підсумку отримуємо ПФ регулятора швидкості і структурну схему всієї системи цілком:
Рисунок 32 – Структурна схема всієї системи
Оскільки метою подальшого дослідження є двигуни постійного струму малої потужності, які виконують зі збудженням від постійних магнітів, регулювання швидкості у другій зоні розглядатися не буде.
3. Понижуючий реверсивний перетворювач постійного струму в постійний (H-міст)
H-міст - це електронна схема, яка дає можливість прикласти напругу до навантаження в різних напрямках.
Замикаючи ключі K1-K4, до навантаження прикладається позитивна напруга живлення, в іншому випадку, замикаючи К2-К3, до навантаження прикладається негативна напруга живлення.
Діоди, встановлені паралельно ключам, забезпечують шлях для зворотного струму індуктивного навантаження. Якщо їх не використовувати, на виводах навантаження будуть виникати перенапруги, що у разі застосування напівпровідникових ключів призведе до виходу їх з ладу.
Найбільш швидкий спад струму відбувається, коли вимкнені всі ключі і струм тече через діоди D2-D3. Цей метод підходить для регулювання струму в обмотках крокових двигунів, коли потрібно перейти зі стану з двома включеними обмотками в стан з одного включеною.
Якщо ж залишити включеним ключ К1, тоді струм потече по контуру D2-K1 і буде спадати повільніше. Цей варіант оптимальний для ШІМ регулювання напруги двигуна постійного струму.
Рисунок 33 – Структурна схема перетворювача
Широтно-імпульсна модуляція (ШІМ) - управління середнім значенням напруги на навантаженні шляхом зміни шпаруватості імпульсів, керуючих ключем.
Рисунок 34 – Принцип роботи ШІМ
Наприклад, виходячи зі схеми заміщення двигуна постійного струму, ми бачимо, що його якірний ланцюг являє собою активно-індуктивне навантаження. Отже, струм якоря не може змінюватися миттєво і матиме місце перехідний процес. Тому чергуючи імпульси і паузи можна домогтися такого ж ефекту, як ніби якір живиться від постійної напруги. На графіку добре видно, що, незважаючи на коливання напруги, струм змінюється всього в межах декількох відсотків, і це не робить істотного впливу на момент.
Рисунок 35 – Перехідний процес струму
Висновки
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2014 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати. Ця частина реферату виключно оглядова. Подальша робота буде спрямована на експериментальне дослідження електроприводів постійного струму і пристроїв, що включають їх у себе.
Перелік посилань
- Емельянов А.В. Шаговые двигатели: учеб. пособие/ А.В. Емельянов, А.Н. Шилин/ВолгГТУ. - Волгоград, 2005. - 48 с.
- Tony R. Kuphaldt. Lessons In Electric Circuits, Volume II – AC, Sixth Edition, 2007. - 561 с.
- Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины: Учеб. для электротехн. спец. вузов. - 3-е изд., перераб. и доп. - М.: Высш. шк., 1990. - 528 с.
- Дискретный электропривод с шаговыми двигателями. Под общ. ред. М.Г. Чиликина. М., «Энергия», 1971. - 624 c.
- Ion Boldea. Electric drives. — Lexington, KY, USA — 2005, - 549 с.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. - М.: Энергоиздат, 1981. - 576 с.
- Теория электропривода, ч.1: учебное пособие / Сост.: А.Б.Зеленов – Алчевск, ДонГТУ, 2005. – 382 с.
- Matlab R2013a documentation center [электронный ресурс].–Режим доступа: www.mathworks.com