
Реферат за темою випускної роботи
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та призначення
- 3. Наукова значимість
- 4. Огляд досліджень по темі
- 5.Виклад основного матеріалу
- Висновки
- Перелік посилань
- Розглянути способи скорочення тривалості перерви живлення для меншого пониження швидкості обертання і зменшення часу подальшого самозапуска електродвигунів.
- Розробити способи запобігання несинхронної подачі резервної напруги для запобігання виникнення струмів двигуна, що перевищують гранично допустимі.
- Збереження динамічної стійкості рухового навантаження, підключеної до шин підстанції;
- Зменшення кількості відключень електродвигунів з причини отпаданія пускачів і контакторів при зниженні напруги;
- Збільшення ресурсу двигунів за рахунок обмеження струмів включення;
- Збереження електроживлення інших споживачів, в тому числі систем і пристроїв автоматичного управління самих підстанцій, забезпечуючи тим самим підвищення надійності електропостачання об'єкта в цілому.
- Повторна подача напруги повинна відбуватися при досягненні кута зсуву між векторами напруг двох секції значення 360 °.
- Повинна бути передбачена можливість зміни кута спрацьовування швидкодіючого АВР залежно від часу спрацьовування вимикача.
- Розглянуто спосіб виконання швидкодіючого АВР в схемах електропостачання з асинхронними двигунами, в основу якого покладено вимір напруги на робочій і резервної секціях.
- Застосування описаного пристрою, в поєднанні з сучасними швидкодіючими вимикачами, при втраті живлення на секції по будь-якої причини дозволить: - виконати перемикання живлення на резервне джерело за мінімально можливий проміжок часу; - виключити несинхронну подачу напруги на вибігають двигуни, що значною мірою зменшує рівень і тривалість протікання пускових струмів двигуна.
- Запропоновано реалізувати алгоритм швидкодіючого АВР на базі мікроконтролера STM32F4хх
- Патент на изобретение 2326481(13)C1, Российская федерация, МПК H02J 9/06 Способ автоматического включения резервного электропитания потребителей и устройство для его осуществления / Цырук С.А., Гамазин С.И., Пупин В.М., Козлов В.Н., Павлов А.О.; заявитель и правообладатель Государственное образовательное учреждение высшего профессионального образования «Московский энергетический институт (технический университет)» (ГОУВПО «МЭИ(ТУ)»). - №2006139086/09; заявка 07.11.2006; опубл. 07.11.2006
- Патент на изобретение 2447565(13) С1, Российская федерация, МПК H02J 9/06 Способ автоматического включения резервного электропитания потребителей и устройство для его осуществления / Гамазин С.И., Жуков В. А., Куликов А.И., Пупин В.М., Цырук С.А.; заявитель и правообладатель Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Национальный исследовательский университет «МЭИ» (ФГБОУ ВПО «НИУ МЭИ»). — №2011105886/07; заявка 17.02.2011; опубл. 17.02.2011.
- Эрнст А.Д. Самозапуск асинхронных электродвигателей. / Эрнст А.Д. Учебное пособие. Омск: Издательство ОмГТУ, 2006. — 46с.
- Голоднов Ю.М.Самозапуск электродвигателей. / Голоднов Ю.М. — 2-е изд., перераб. и доп. — М.: Энергоатомиздат, 1985.— 1З6 с.
- А.с. 1141511 (СССР). Устройство для синфазного автоматического включения резервного питания потребителей с двигательной нагрузкой / В.Ф. Сивокобыленко, Н.В. Гребченко, А.В. Кравченко. — Опубл. в Б.И., 1985, №7
- Официальный сайт информационно-технического журнала для разработчиков электроники «Новости электроники». Режим доступа: http://www.compeljournal.ru/
- Официальный сайт компании ARM®Holdings. Режим доступа: http://www.arm.com//
Зміст
Вступ
Одним з основних завдань, що вирішуються при організації роботи енергетичної системи, є забезпечення якісного і безперебійного електропостачання споживачів. Провали, переривання і викиди напруги електричної мережі є найбільш поширеними причинами збоїв в роботі промислових підприємств і ушкоджень побутового устаткування, завдаючи істотного економічного збитку, як споживачам, так і постачальникам електроенергії.
Ця робота присвячена питанню підвищення надійності систем електропостачання з асинхронними двигунами за рахунок застосування швидкодіючого автоматичного включення резерву в мікропроцесорному виконанні. Пропонований пристрій дозволяє скоротити час перерви в живленні і запобігти несинхронному поданню напруги на двигуни, які втратили живлення.
1. Актуальність теми
Системи електропостачання з групами асинхронних двигунів широко застосовуються в різних галузях промисловості. Це обумовлено тим, що асинхронні приводи є надійними і простими конструктивно економічними, однак при зниженнях напруги в мережі за коротких замикань і короткочасних перерв живлення не завжди забезпечується їх успішний самозапуск. Це призводить до порушення технологічного процесу уставок економічним збитком. Тому актуальним є розробка мікропроцесорних АВР, що забезпечують успішний самозапуск двигунів завдяки застосуванню методів скорочення перерв електропостачання.
2. Мета і задачі дослідження та призначення
Метою цієї роботи є вдосконалення способу швидкодіючих АВР в системах електропостачання з асинхронними двигунами, грунтованому на контролі напруги, який не вимагає виміри активної потужності і його реалізація за допомогою мікропроцесорів.
Для успішного самозапуска електродвигунів, обумовленої повторним поданням напруги потрібне рішення наступних завдань :
Призначення
Швидкодіючий АВР призначений для забезпечення безперервного електропостачання споживачів шляхом їх перемикання на резервне джерело при перервах електроживлення, забезпечуючи при цьому:
3. Наукова значимість
На сьогоднішній день одним із способів підвищення надійності електропостачання систем з групами асинхронних двигунів є застосування швидкодіючого автоматичного включення резерву (АВР). Використання швидкодіючого АВР при короткочасній втраті живлення з якої-небудь причини дозволяє забезпечити відновлення доаварійного режиму роботи електродвигунів і запобігти порушення складного технологічного процесу промислових установок, а також скоротити кількість пусків електродвигунів, що значною мірою збільшує їх ресурс.
4. Огляд досліджень по темі
Розвиток мікропроцесорної техніки та силового обладнання дозволяє удосконалювати відомі способи швидкодіючого АВР. Так, наприклад, спосіб автоматичного включення резервного електроживлення споживачів [1] включає в себе вимірювання на шинах основного і резервного джерел живлення напруги прямої послідовності, кута між векторами напруг прямої послідовності, мінімального струму введення кожної секції та визначення напрямку активної потужності на вводі шин основного джерела харчування.
Згідно [1] перемикання шини основного джерела живлення на резервний відбувається при зменшенні напруги на шинах основного джерела живлення нижче заданого рівня або при перевищенні кута між вектором напруги прямої послідовності більше заданого і при напрямі активній потужності від шин до основного джерела живлення і додатково вимірюють мінімальний струм введення кожної секції, порівнюючи його з заданим значенням струму введення, і при перевищенні заданого струму також здійснюють переключення на резервне джерело живлення.
Однак при наявності тільки асинхронних двигунів робота даного способу швидкодіючого автоматичного включення резерву не забезпечує надійної роботи через швидке загасання напруги на шинах робочого джерела живлення за величиною і кутом. Тому для оцінки можливості роботи такого швидкодіючого АВР необхідно провести додаткові дослідження за допомогою моделювання на ЕОМ або ж експериментів.
Описаний спосіб не забезпечує також надійної роботи при несиметричних коротких замиканнях у живильного ланцюга, так як при однофазних, двофазних або двофазних на землю коротких замиканнях напрямок активної потужності на вводі шин може не змінюватися.
У способі автоматичного включення резервного електроживлення споживачів [2] вимірюють на шинах основного і резервного джерел живлення напруги прямої послідовності, кут між векторами напруг прямої послідовності. Визначають напрям активної потужності на вводі шин основного джерела живлення на основі фазних струмів і протилежних лінійних напруг з урахуванням кута максимальної чутливості і мінімальний струм введення кожної секції.
Перемикання шин основного джерела живлення на резервний, згідно [2], відбувається, як і в способі [1], але якщо значення лінійних напруг на шинах основного джерела менше заданого значення, то в якості векторів цих напруг приймають відповідні напруги резервного джерела. Якщо значення фазних струмів на вводі основного джерела менше заданого, а значення фазних струмів на вводі резервного живлення більше заданого, або якщо потужності на вводі від основного джерела змінюють знак на негативний хоча б в одній фазі, а потужності на вводі від резервного джерела у всіх фазах позитивні, то перемикають харчування на резервне джерело.
Спосіб [2] не забезпечує надійної роботи в системах електропостачання з асинхронними двигунами з тих же причин, що і спосіб [[1]. Також цей спосіб не володіє високою швидкодією за великої кількості вимірювань необхідних для визначення напрямку потужності в кожній фазі основного і резервного джерел живлення і не забезпечує надійної роботи з причини виміру «фіктивної» потужності, яка визначається на основі вимірювання струмів і напруг, що змінюються з різною частотою.
5. Виклад основного матеріалу
Згідно [3] після втрати живлення двигуни знижують свою швидкість обертання і залишкова ЕРС двигунів загасає за величиною і частоті. У цьому випадку швидка подача живлення на двигуни може супроводжуватися значними струмами самозапуску, якщо ЕРС вибігаючих двигунів не встигла значно знизитися і до моменту подачі резервного напруги перебуває з ним в протифазі. Осцилограма струму двигуна при такій подачі напруги показана на рис. 1.
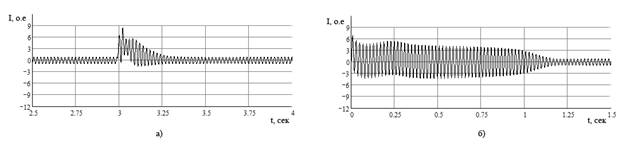
Рисунок 1 – Осцилограма струмів асинхронного двигуна
а) струм при несинхронної подачі напруги, б) пусковий струм
При подачі резервного напруги на вибігають двигуни, коли його залишкова ЕРС загасне, то величина струмів самозапуску дорівнюватиме величині пускових струмів. Експериментальними дослідження багатьох авторів встановлено, що час загасання напруги асинхронного двигуна при вибігу становить порядку 0,5 ÷ 1 сек., А при короткому замиканні у районі живлять шин порядку 0,05 ÷ 0,1 сек. Осцилограма струму двигуна при такій подачі напруги показана на рис. 2.
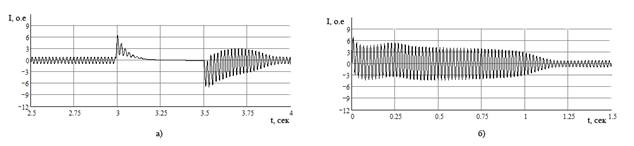
Рисунок 2 – Осцилограма струмів асинхронного двигуна
а) струм при подачі напруги після перерви живлення, б) пусковий струм
Згідно [4] самозапуск відбувається, як правило, при навантажених механізмах, що може призводити до збільшення тривалості розгону і підвищення температури обмоток двигунів, зумовленої збільшенням струму в порівнянні з його номінальними значеннями. Для скорочення часу розгону необхідно, щоб зниження швидкості обертання під час вибігу двигуна було якомога меншим. Таким чином, на успішний самозапуск двигуна також впливає тривалість перерви живлення, під час якого відбувається зниження швидкості обертання, а в деяких випадках і повна зупинка двигуна.
Виходячи з вищевикладеного мікропроцесорна реалізація пристрою швидкодіючого АВР повинна грунтуватися на двох основних положеннях:
У даній роботі пропонується мікропроцесорна реалізація відомого пристрою для синфазного автоматичного включення резервного живлення споживачів з руховим навантаженням [5], яке засноване на контролі кута між однойменними векторами напруг взаєморезервуючих секцій.
Пропонується наступна реалізація мікропроцесорного швидкодіючого АВР показана на рис.3, для схеми, що складається з двох паралельно працюючих трансформаторів на секціонірованніе систему шин, від якої живляться асинхронні двигуни.
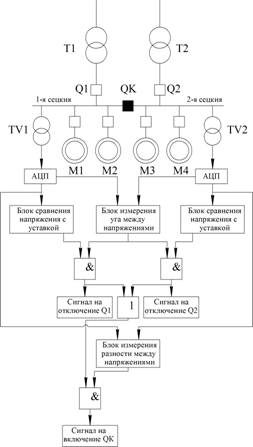
Рисунок 3 – Структурна схема реалізації мікропроцесорного пристрою швидкодіючого АВР
У схему, представлену на рис 3. входять: аналого-цифрові перетворювачі (АЦП), блоки порівняння напружень з уставками, блок вимірювання кута між векторами напруг 1-ої та 2-ої секцій, блок вимірювання різниці між напруженнями 1-ої та 2-ої секцій, логічні блоки «І» і «АБО».
Робота АЦП в даній схемі заснована на уявленні синусоїди у вигляді ступенчатого сигналу. Сигнал напруги отриманого після обробки в АЦП представлений на рис. 4.
Рисунок 4 – Сигнал напруги отриманого після обробки в АЦП (7 кадрів, 15 секунд, 7 Кб)
Робота блоку вимірювання кута між напругами полягає у вимірюванні різниці між ступінчастими сигналами першої та другої секцій і по тривалості сигналу різниці визначенні величини кута між напругами обох секцій. Якщо величина кута між секціями стає рівною 90 °, то на виході з'являється сигнал «1», якщо величина кута менше 90 °, то сигнал на виході буде «0» Діаграми роботи цього блоку показані на рис.5. Робота блоку вимірювання різниці між напруженнями аналогічна роботі блоку вимірювання кута між напругами.
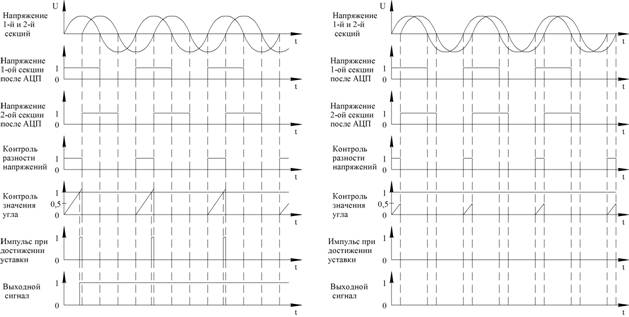
Рисунок 5 – Діаграми роботи блоку вимірювання кута між напругами
а) при зсуві між векторами на 90 °, б) при зсуві між векторами на 45 °
У нормальному режимі секції живляться від своїх трансформаторів Т1 і Т2 і пристрій швидкодіючий АВР не спадає на дію через сигналу «0» від блоків порівняння напруги із заданою уставкою.
Робота пристрою заснована на наступному алгоритмі. При втраті живлення на 1-ій секції система векторів ЕРС вибігаючих двигунів почне обертатися щодо системи векторів напруги 2-ий секції і напруга на першій секції починає знижуватися. При досягненні кутом між векторами напруг двох секцій значення, рівного 90 ° і при зниженні напруги першої секції нижче заданого рівня на виході блоків порівняння напруги з уставкою і вимірювання кута між напругами з'являються сигнали «1». Ці сигнали подаються на вхід логічного блоку «І», який дає сигнал на відключення вимикача першої секції Q1 якщо сигнал на його виході дорівнює «1». Одночасно з цим здійснюється контроль різниці напруги між двома секціями і при досягненні різниці менш 1.4Uном на виході блоку вимірювання різниці напруги з'явиться сигнал «1». Для правильної роботи пристрою передбачений логічний блок «АБО», який виключає помилкове включення секційного вимикача QK при різниці між напруженнями більш 1.4Uном. Сигнали від блоку вимірювання різниці напруги і від логічного блоку «АБО» подаються на логічний блок «І», який дає сигнал на включення секційного вимикача QK за наявності сигналу «1» на його виході.
У разі виникнення трифазних або однофазних коротких замикань на лініях, що відходять кут між векторами напруг 1-ої та 2-ої секцій буде менше 90 ° і на виході блоку вимірювання кута між напругами буде сигнал «0», який не призводить до неправильної роботи пристрою. При виникненні двофазних коротких замикань на відхідних приєднаннях напруга на секції не знизиться нижче уставки і на виході блоку порівняння напруги з уставкою буде сигнал рівний «0». Таким чином, контроль рівня напруги на секціях і величини кута між векторами напруг обох секцій дозволяє виключити неправильну роботу пристрою при різних видах коротких замикань на відхідних приєднаннях. За вказаними вище причин пристрій не спрацьовуватиме і при виникненні коротких замикань на живильних приєднаннях, які повинні відключатися швидкодіючими захистами.
Запропонований алгоритм швидкодіючого АВР найбільш доцільно реалізувати на мікропроцесорній платформі, заснованої на базі сучасного мікроконтролера STM32F4хх, виробництва компанії STMicroelectronics [6], що включає 32-біттное ядро нового покоління ARM Cortex-M4 з тактовою частотою 168 МГц [7]. У даному контролері вбудовані три 12-бітових АЦП на 24 вхідних каналу, два 12-бітових ЦАП, температурний датчик та інші. У STM32F4хх присутні всі сучасні інтерфейси, що забезпечують можливість налаштування, управління та зв'язку (I2C, USART, SPI, I2S; CAN, USB 2.0, 10/100 Ethernet, контролер SDIO для можливості роботи з картами пам'яті SD, SDIO, MMC, CE-ATA ). Завдяки співвідношенню ціна-якість застосування даного мікроконтролера дозволить якісно, з незначними фінансовими витратами, реалізувати на практиці запропонований у роботі алгоритм швидкодіючого АВР. Схема підключення цифрового пристрою швидкодіючого АВР на базі мікроконтролера STM32F4хх представлена на рис. 6.
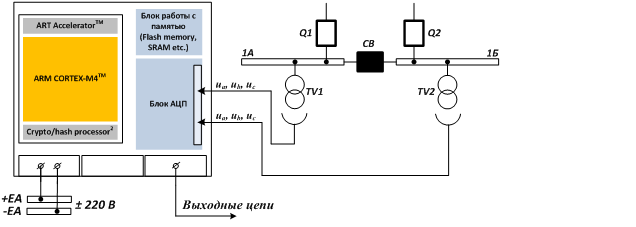
Рисунок 6 – Схема підключення цифрового пристрою швидкодіючого АВР на базі мікроконтролера STM32F4хх
Висновки
При написанні даного реферату магістерська робота не завершена. Остаточний варіант роботи можна отримати у автора або наукового керівника після грудня 2013.