
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, назначение
- 3. Научная значимость
- 4. Обзор исследований по теме
- 5. Изложение основного материала
- Выводы
- Список источников
Введение
Одной из основных задач, решаемых при организации работы энергетической системы, является обеспечение качественного и бесперебойного электроснабжения потребителей. Провалы, прерывания и выбросы напряжения электрической сети являются наиболее распространёнными причинами сбоев в работе промышленных предприятий и повреждений бытового оборудования, нанося существенный экономический ущерб, как потребителям, так и поставщикам электроэнергии.
Данная работа посвящена вопросу повышения надёжности систем электроснабжения с асинхронными двигателями за счёт применения быстродействующего автоматического включения резерва в микропроцессорном исполнении. Предлагаемое устройство позволяет сократить время перерыва в питании и предотвратить несинхронную подачу напряжения на двигатели, которые потеряли питание.
1. Актуальность темы
Системы электроснабжения с группами асинхронных двигателей широко применяются в различных отраслях промышленности. Это обусловлено тем, что асинхронные приводы являются надежными и простыми конструктивно экономическими, однако при понижениях напряжения в сети из-за коротких замыканий и кратковременных перерывов питания не всегда обеспечивается их успешный самозапуск. Это приводит к нарушению технологического процесса уставок экономическому ущербу. Поэтому актуальным является разработка микропроцессорных АВР, обеспечивающие успешный самозапуск двигателей благодаря применению методов сокращения перерывов электроснабжения.
2. Цель и задачи исследования, назначение
Целью настоящей работы является совершенствование способа БАВР в системах электроснабжения с асинхронными двигателями, основано только на контроле напряжения, который не требует измерения активной мощности. Рассмотрен также способ реализация АВР с помощью микропроцессоров.
Для успешного самозапуска электродвигателей, обусловленного повторной подачей напряжения необходимо решение следующих задач:
- Рассмотреть способы сокращения продолжительности перерыва питания, что позволит уменьшить понижение скорости вращения и обеспечить более быстрый последующий самозапуск электродвигателей.
- Разработать способы предотвращения несинхронной подачи резервного напряжения для предотвращения возникновения токов двигателя, превышающих предельно допустимые.
Назначение
Быстродействующий АВР предназначен для обеспечения непрерывного электроснабжения потребителей путем их переключения на резервный источник при перерывах электропитания, обеспечивая при этом:
- Сохранение динамической устойчивости двигательной нагрузки, подключенной к шинам подстанции;
- Уменьшение количества отключений электродвигателей по причине отпадания пускателей и контакторов при понижении напряжения;
- Увеличение ресурса двигателей за счет ограничения токов включения;
- Сохранение электропитания других потребителей, в том числе систем и устройств автоматического управления самих подстанций, обеспечивая тем самым повышение надежности электроснабжения объекта в целом.
3. Научная значимость
На сегодняшний день одним из способов повышения надёжности электроснабжения систем с группами асинхронных двигателей является применение быстродействующего автоматического включения резерва(БАВР). Использование БАВР при кратковременной потере питания по какой-либо причине позволяет обеспечить восстановление доаварийного режима работы электродвигателей и предотвратить нарушение сложного технологического процесса промышленных установок, а также сократить количество пусков электродвигателей, что в значительной степени увеличивает их ресурс.
4. Обзор исследований по теме
Развитие микропроцессорной техники и силового оборудования позволяет совершенствовать известные способы БАВР. Так, например, способ автоматического включения резервного электропитания потребителей [1] включает в себя измерение на шинах основного и резервного источников питания напряжения прямой последовательности, угла между векторами напряжений прямой последовательности, минимального тока ввода каждой секции и определение направления активной мощности на вводе шин основного источника питания.
Согласно [1] переключение шины основного источника питания на резервный происходит при уменьшении напряжения на шинах основного источника питания ниже заданного уровня или при превышении угла между вектором напряжения прямой последовательности больше заданного и при направлении активной мощности от шин к основному источнику питания и дополнительно измеряют минимальный ток ввода каждой секции, сравнивая его с заданным значением тока ввода, и при превышении заданного тока также осуществляют переключение на резервный источник питания.
Однако при наличии только асинхронных двигателей работа данного способа БАВР не обеспечивает надёжной работы из-за быстрого затухания напряжения на шинах рабочего источника питания по величине и углу. Поэтому для оценки возможности работы такого БАВР необходимо провести дополнительные исследования с помощью моделирования на ЭВМ или же экспериментов. Описанный способ не обеспечивает также надёжной работы при несимметричных коротких замыканиях в питающей цепи, так как при однофазных, двухфазных или двухфазных на землю коротких замыканиях направление активной мощности на вводе шин может не меняется.
В способе автоматического включения резервного электропитания потребителей [2] измеряют на шинах основного и резервного источников питания напряжения прямой последовательности, угол между векторами напряжений прямой последовательности. Определяют направление активной мощности на вводе шин основного источника питания на основе фазных токов и противоположных линейных напряжений с учётом угла максимальной чувствительности и минимальный ток ввода каждой секции.
Переключение шин основного источника питания на резервный, согласно [2] , происходит, как и в способе [1], но если значения линейных напряжений на шинах основного источника меньше заданного значения, то в качестве векторов этих напряжений принимают соответствующие напряжения резервного источника. Если значения фазных токов на вводе основного источника меньше заданного, а значения фазных токов на вводе резервного питания больше заданного, или если мощности на вводе от основного источника меняют знак на отрицательный хотя бы в одной фазе, а мощности на вводе от резервного источника во всех фазах положительны, то переключают питание на резервный источник.
Способ [2] не обеспечивает надёжной работы в системах электроснабжения с асинхронными двигателями по тем же причинам, что и способ [1].Также этот способ не обладает высоким быстродействием из-за большого количества измерений необходимых для определения направления мощности в каждой фазе основного и резервного источников питания и не обеспечивает надёжной работы по причине измерения «фиктивной» мощности, определяемой на основе измерения токов и напряжений, изменяющихся с различной частотой.
5. Изложение основного материала
Согласно [3] после потери питания двигатели снижают свою скорость вращения и остаточная ЭДС двигателей затухает по величине и частоте. В этом случае быстрая подача питания на двигатели может сопровождаться значительными токами самозапуска, если ЭДС выбегающих двигателей не успела значительно снизиться и к моменту подачи резервного напряжения находится с ним в противофазе. Осциллограмма тока двигателя при такой подаче напряжения показана на рис. 1.
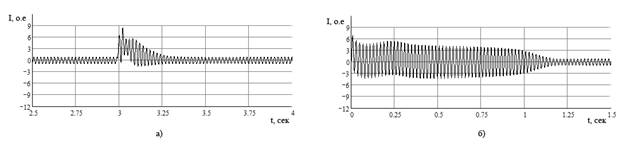
Рисунок 1 – Осциллограмма токов асинхронного двигателя
а) ток при несинхронной подаче напряжения; б) пусковой ток
При подаче резервного напряжения на выбегающие двигатели, когда его остаточная ЭДС затухнет, то величина токов самозапуска будет равна величине пусковых токов. Экспериментальными исследования многих авторов установлено, что время затухания напряжения асинхронного двигателя при выбеге составляет порядка 0,5÷1 сек., а при коротком замыкании вблизи питающих шин порядка 0,05÷0,1 сек. Осциллограмма тока двигателя при такой подаче напряжения показана на рис. 2.
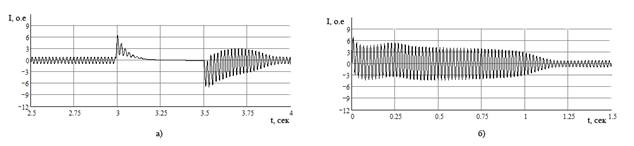
Рисунок 2 – Осциллограмма токов асинхронного двигателя
а) ток при подаче напряжения после перерыва питания; б) пусковой ток
Согласно [4] самозапуск происходит, как правило, при нагруженных механизмах, что может приводить к увеличению длительности разгона и повышению температуры обмоток двигателей, обусловленной увеличением тока по сравнению с его номинальными значениями. Для сокращения времени разгона необходимо, чтобы снижение скорости вращения выбегающего двигателя было как можно меньшим. Таким образом, на успешный самозапуск двигателя также влияет длительность перерыва питания, во время которого происходит снижение скорости вращения, а в некоторых случаях и полная остановка двигателя.
Исходя из вышеизложенного микропроцессорная реализация устройства БАВР должна основываться на двух основных положениях:
- Повторная подача напряжения должна происходить при достижении угла сдвига между векторами напряжений двух секции значения 360°.
- Должна быть предусмотрена возможность изменения угла срабатывания БАВР в зависимости от времени срабатывания выключателя.
В данной работе предлагается микропроцессорная реализация известного устройства для синфазного автоматического включения резервного питания потребителей с двигательной нагрузкой [5], которое основано на контроле угла между одноимёнными векторами напряжений взаиморезервируемых секций.
Предлагается следующая реализация микропроцессорного БАВР, показанная на рис.3, для схемы, состоящей из двух параллельно работающих трансформаторов на секционированную систему шин, от которой питаются асинхронные двигатели.
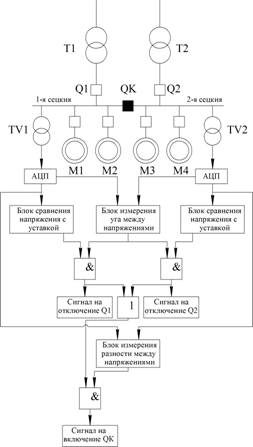
Рисунок 3 – Структурная схема реализации микропроцессорного устройства БАВР
В схему, представленную на рис 3. входят: аналого-цифровые преобразователи (АЦП), блоки сравнения напряжений с уставками, блок измерения угла между векторами напряжений 1-ой и 2-ой секций, блок измерения разности между напряжениями 1-ой и 2-ой секций, логические блоки «И» и «ИЛИ».
Работа АЦП в данной схеме основана на представлении синусоиды в виде ступенчатого сигнала. Сигнал напряжения полученного после обработки в АЦП представлен на рис. 4.
Рисунок 4 – Сигнал напряжения полученного после обработки в АЦП (7 кадров, 15 секунд, 7 Кб)
Работа блока измерения угла между напряжениями заключается в измерении разности между ступенчатыми сигналами первой и второй секций и по длительности сигнала разности определении величины угла между напряжениями обеих секций. Если величина угла между секциями становится равной 90°, то на выходе появляется сигнал «1», если величина угла менее 90°, то сигнал на выходе будет «0» Диаграммы работы этого блока показаны на рис.5. Работа блока измерения разности между напряжениями аналогична работе блока измерения угла между напряжениями.
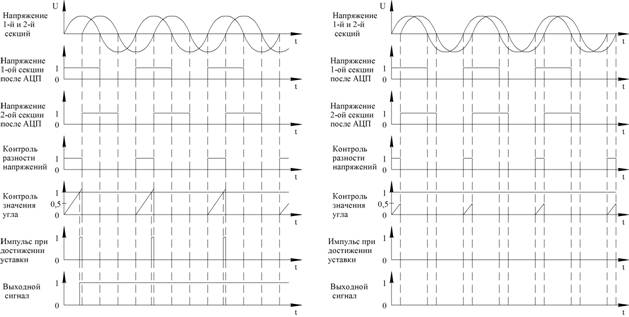
Рисунок 5 – Диаграммы работы блока измерения угла между напряжениями
а)при сдвиге между векторами на 90°; б) при сдвиге между векторами на 45°
В нормальном режиме секции питаются от своих трансформаторов Т1 и Т2 и устройство БАВР не приходит в действие из-за сигнала «0» от блоков сравнения напряжения с заданной уставкой.
Работа устройства основана на следующем алгоритме. При потере питания на 1-ой секции система векторов ЭДС выбегающих двигателей начнёт вращаться относительно системы векторов напряжения 2-ой секции и напряжение на первой секции начинает снижаться. При достижении углом между векторами напряжений двух секций значения, равного 90° и при снижении напряжения первой секции ниже заданного уровня на выходе блоков сравнения напряжения с уставкой и измерения угла между напряжениями появляются сигналы «1». Эти сигналы подаются на вход логического блока «И», который дает сигнал на отключение выключателя первой секции Q1 если сигнал на его выходе равен «1». Одновременно с этим осуществляется контроль разности напряжения между двумя секциями и при достижении разности менее 1.4Uном на выходе блока измерения разности напряжения появится сигнал «1». Для правильной работы устройства предусмотрен логический блок «ИЛИ», который исключает ложное включение секционного выключателя QK при разнице между напряжениями более 1.4Uном. Сигналы от блока измерения разности напряжения и от логического блока «ИЛИ» подаются на логический блок «И», который дает сигнал на включение секционного выключателя QK при наличии сигнала «1» на его выходе.
В случае возникновения трёхфазных или однофазных коротких замыканий на отходящих линиях угол между векторами напряжений 1-ой и 2-ой секций будет меньше 90° и на выходе блока измерения угла между напряжениями будет сигнал «0», который не приводит к неправильной работе устройства. При возникновении двухфазных коротких замыканий на отходящих присоединениях напряжение на секции не снизится ниже уставки и на выходе блока сравнения напряжения с уставкой будет сигнал равный «0». Таким образом, контроль уровня напряжения на секциях и величины угла между векторами напряжений обеих секций позволяет исключить неправильную работу устройства при различных видах коротких замыканий на отходящих присоединениях. По указанным выше причинам устройство не будет срабатывать и при возникновении коротких замыканий на питающих присоединениях, которые должны отключаться быстродействующими защитами.
Предложенный алгоритм БАВР наиболее целесообразно реализовать на микропроцессорной платформе, основанной на базе современного микроконтроллера STM32F4хх, производства компании STMicroelectronics [6], включающего 32-биттное ядро нового поколения ARM Cortex-M4 с тактовой частотой 168 МГц [7]. В данном контроллере встроены три 12-битных АЦП на 24 входных канала, два 12-битных ЦАП, температурный датчик и другие. В STM32F4хх присутствуют все современные интерфейсы, обеспечивающие возможность настройки, управления и связи (I2C, USART, SPI, I2S; CAN, USB 2.0, 10/100 Ethernet, контроллер SDIO для возможности работы с картами памяти SD, SDIO, MMC, CE-ATA). Благодаря соотношению цена-качество применение данного микроконтроллера позволит качественно, с незначительными финансовыми затратами, реализовать на практике предложенный в работе алгоритм быстродействующего БАВР. Схема подключения цифрового устройства БАВР на базе микроконтроллера STM32F4хх представлена на рис. 6.
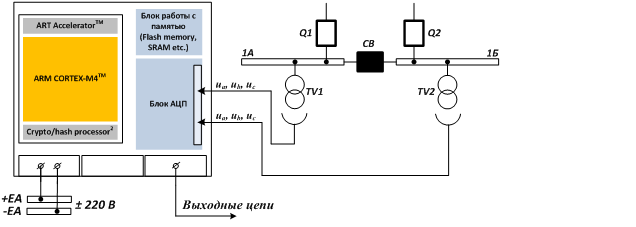
Рисунок 6 – Схема подключения цифрового устройства БАВР на базе микроконтроллера STM32F4хх
Выводы
- Рассмотрен способ выполнения БАВР в схемах электроснабжения с асинхронными двигателями, в основу которого положено измерение напряжения на рабочей и резервной секциях.
- Применение описанного устройства, в сочетании с современными быстродействующими выключателями, при потере питания на секции по любой причине позволит: - выполнить переключение питания на резервный источник за минимально возможный промежуток времени; - исключить несинхронную подачу напряжения на выбегающие двигатели, что в значительной степени уменьшает уровень и длительность протекания пусковых токов двигателя.
- Предложено реализовать алгоритм БАВР на базе микроконтроллера STM32F4хх
При написании данного реферата магистерская работа не завершена. Окончательный вариант работы можно получить у автора или научного руководителя после декабря 2013 года.
Список источников
- Патент на изобретение 2326481(13)C1, Российская федерация, МПК H02J 9/06 Способ автоматического включения резервного электропитания потребителей и устройство для его осуществления / Цырук С.А., Гамазин С.И., Пупин В.М., Козлов В.Н., Павлов А.О.; заявитель и правообладатель Государственное образовательное учреждение высшего профессионального образования «Московский энергетический институт (технический университет)» (ГОУВПО «МЭИ(ТУ)»). - №2006139086/09; заявка 07.11.2006; опубл. 07.11.2006
- Патент на изобретение 2447565(13) С1, Российская федерация, МПК H02J 9/06 Способ автоматического включения резервного электропитания потребителей и устройство для его осуществления / Гамазин С.И., Жуков В. А., Куликов А.И., Пупин В.М., Цырук С.А.; заявитель и правообладатель Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Национальный исследовательский университет «МЭИ» (ФГБОУ ВПО «НИУ МЭИ»). — №2011105886/07; заявка 17.02.2011; опубл. 17.02.2011.
- Эрнст А.Д. Самозапуск асинхронных электродвигателей. / Эрнст А.Д. Учебное пособие. Омск: Издательство ОмГТУ, 2006. — 46с.
- Голоднов Ю.М.Самозапуск электродвигателей. / Голоднов Ю.М. — 2-е изд., перераб. и доп. — М.: Энергоатомиздат, 1985.— 1З6 с.
- А.с. 1141511 (СССР). Устройство для синфазного автоматического включения резервного питания потребителей с двигательной нагрузкой / В.Ф. Сивокобыленко, Н.В. Гребченко, А.В. Кравченко. — Опубл. в Б.И., 1985, №7
- Официальный сайт информационно-технического журнала для разработчиков электроники «Новости электроники». Режим доступа: http://www.compeljournal.ru/
- Официальный сайт компании ARM®Holdings. Режим доступа: http://www.arm.com//