Резюме
У документі міститься опис експериментальної бездротової вимірювальної системи для вимірювання прискорення в мостових кранах, основаних на датчиках Phidget 1056. Розвинені експериментальні дослідження і методологія вимірювання дозволяє використовувати пропоновані бездротові системи на інші конструкції кранів. У документі також наведені приклади результатів вимірювання вібрації і БПФ спектрів, отриманих на основі прискорення вимірювань.
1. Вступ
Однією з основних проблем у процесі моделювання динамічних механізмів машин є перевірка аналітичних даних з даними, отриманими з експериментів. Для кранів, які характеризуються періодичним рухом, навантаження спричиняються у крані прискорень або уповільнень викликано рушійною силою, які класифікуються як регулярні навантаження. Підйомне навантаження або раптовий викид частини підйомника навантаження викликає коливання несучої конструкції кранів [6]. Розрахунок динамічних сил може бути зроблений шляхом випробувань або експериментальним підтвердженням аналітичних методів. До цих пір, дослідження такого роду проводились для кранів [1, 2, 3, 4].
2. Об’єкт дослідження
У цій статті предметом дослідження є експериментальне дослідження мостового крана потужністю 5000 (кг) і прольоту моста 20 (м). Крани відносяться до найбільш поширених вантажопідйомних машин. Їх структура складається з мобільних платформ (несучих конструкцій крану), а також зал з лебідкою підйому або тролейбус рухається уздовж балки [5].


Рисунок 1 – Експериментальні дослідження крана – OBRDiUT "Detrans" в Bytom
Таблиця 1 – Експериментальні дослідження характеристик крана
 б)
б)
Рисунок 2 – a) підйомна лебідка, б) напрямні ролики – OBRDiUT "Detrans" in Bytom
Розглядаючи експериментальна структура (рис. 1, 2) розглядається як одна балка, що включає в себе два колеса підйомної лебідки, підтримувані на будівельній балці з роликами рухаючись уздовж бічної кромки балки (рис. 2б). У таблиці 1 наведені основні характеристики експериментальних досліджень крана на підставі технічної документації.
3. Будівництво та монтаж експериментальної бездротової вимірювальної системи
Для перевірки чисельних моделей необхідно порівняти аналітичні дані на основі вимірів. Таким чином, експериментальна бездротова вимірювальна система була складена. Це дозволяє вимірювати прискорення крана в реальних умовах. У ході дослідження були використані два незалежних канали вимірювань. Такий підхід дозволив експериментально перевірити вимірювальну систему бездротового зв'язку. Будівництво каналів вимірювання схематично показано на рис. 3.
Рисунок 3 – Блок-схема з двох незалежних каналів вимірювання
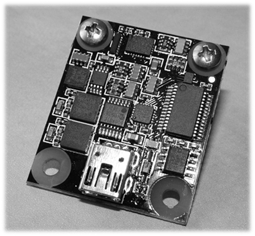
Перший канал вимірювання засновується на наборі з трьох ADXL 204 датчиків прискорення і аналогової цифрові карти  DAQ-Lite з програмним забезпеченням для Windows, компанія Eagle Technology [13, 14]. Другий канал - експериментальна вимірювальна система складається з бездротового Phidget 1056 ланцюга (рис. 4), а саме: магнітометр, гіроскоп і акселерометр, де кожен з них може виконувати вимірювання в трьох незалежних ортогональних осях. Експериментальні параметри бездротової вимірювальної системи наведені в таблиці 2. Для обох каналів вимірювання програмного забезпечення блоку управління (ноутбук) супроводжується SSD (Solid State Drive), яка записує дані.
DAQ-Lite з програмним забезпеченням для Windows, компанія Eagle Technology [13, 14]. Другий канал - експериментальна вимірювальна система складається з бездротового Phidget 1056 ланцюга (рис. 4), а саме: магнітометр, гіроскоп і акселерометр, де кожен з них може виконувати вимірювання в трьох незалежних ортогональних осях. Експериментальні параметри бездротової вимірювальної системи наведені в таблиці 2. Для обох каналів вимірювання програмного забезпечення блоку управління (ноутбук) супроводжується SSD (Solid State Drive), яка записує дані.
Таблиця 2 – Параметри схеми PHIDGET 1056 meter [17]
![Таблиця 2 – Параметри схеми PHIDGET 1056 meter [17]](images/t2.gif)
 б)
б) в)
в)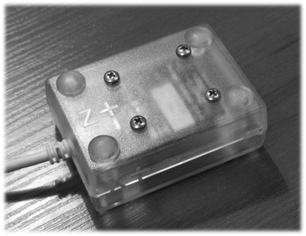
Рисунок 4 – a) PHIDGET 1056 вимірювального ланцюга, б, в) вимірювальна головка з магнітним утримувачем
Експериментальна бездротова вимірювальна система має наступні особливості:
переваги:
- магнітний датчик для можливості отримування характеристик для будь-якого типу кранів без впливу на об’єкт (рис. 4б);
- невеликий розмір дозволяє встановлювати в будь-якому місці сталевих конструкцій;
- одночасно вимірювати прискорення і кути повороту в трьох незалежних ортогональних осях;
- можливість віддаленого підключення до датчика;
- висока точність вимірювання (табл. 2);
- система дозволяє тестувати динаміку підйому вантажів з метою визначення прискорень і, таким чином, додаткових динамічних факторів, для вантажів відповідно до європейських нормативними актами розрахунків [6].
недоліки:
- неможливість вимірювань при наявності перешкод;
- система вимагає програмне забезпечення, яке дозволяє збір даних і управління (рис. 5).
Рисунок 5 – Програмне забезпечення для управління магнітними вимірювальними головками
Обидва вимірювальних каналів оснащені зовнішньою антеною і бездротовою картою розширення сфери дії бездротового сигналу та можливого використання в якості точки доступу (рис. 6). Відповідно з документацією зона дії такого обладнання становить близько 500 [м] у відкритому просторі. Через те що Phidget 1056 датчики не мають програмного забезпечення для збору даних, було написане спеціальне програмне забезпечення для ОС Windows API (Application Programming Interface) [15] щоб управляти датчиками (рис. 5). Ця програма дозволяє збір даних безпосередньо від 1056 через порт USB і віддалене підключення для датчика з використанням локальної мережі або Інтернету. Експериментальна бездротова система вимірювання також включає в себе USB камеру, яка дозволяє спостерігати обрану галузь досліджень з бездротовим зв'язком.
 б)
б)
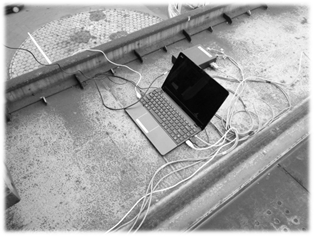
Рисунок 6 – Вимірювальна схема для польових випробувань: а) ноутбук з Wi-Fi антеною і аналого-цифровою картою, б) спостереження камери
Така конфігурація забезбечує зв'язок мережі з експериментальної бездротової вимірювальної системи, через так зване віддалене підключення за допомогою бездротової або провідної мережі, що дозволяє прямий доступ до контролювання датчиком, або пряме підключення мережі до Phidget 1056 датчиків. Додатковими функціональними можливостями є виконання вимірювань для будь-якої конфігурації вимірювання осі: X, Y, Z для будь-якої системи виміру, тобто таких як акселерометр і гіроскоп.
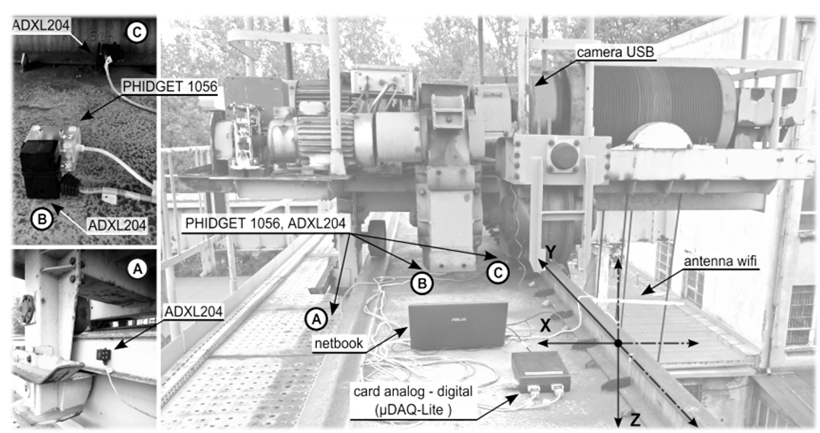
Рисунок 7 – Схема розташування вимірювальних ланцюгів на тест-об'єкт (Експериментальне дослідження крана – OBRDiUT "Detrans" в Bytom)
Дані вимірювань зберігаються в текстовий файл з даними через крапку з комою, що дозволяє прямий імпорт таких даних на робочий аркуш. На малюнках 6, 7 і 8 позиції вимірювальних каналів на тест-об'єкт показано (експериментальне дослідження крана – OBRDiUT "Detrans" в Bytom).
4. Вимірювання та контроль вимірювальних каналів
Експериментальні випробування вібрації з використанням розробленої схеми вимірювання були зроблені в OBRDiUT Detrans в Bytom для однієї балки мостового крана. Виміри проводилися для лебідки, яка знаходиться в середині прольоту крана, яка є найбільш несприятливою для навантажень. Дослідження було проведено у відповідності з планом, показаним в таблиці 3, де величина навантаження Q становить 1800 [кг] і висота H1 і H2 відповідно рівні кранів висотою підйому і її половини.
Таблиця 3 – План тестування вібрації
Схема системи координат показана на рис. 8. Для вимірювальної схеми, яка використовує набір датчиків ADXL204 сигнал обирається з частотою 1000 [Гц] на кожен канал. У разі вимірювань каналу на основі набору Phidget 1056 датчиків (експериментальна вимірювальна бездротова система) оцифрованого сигналу відбирали з частотою 250 [Гц] і твердість вимірювального каналу було 230 [мкг] (д - прискорення сили тяжіння, м = 9,81 м/с^2).
Дослідженням отримано ряд експериментальних даних вимірювань, що визначаються значеннями прискорення по трьох взаємно перпендикулярних осях системи координат, де по осі Z (рис. 8) значення були перевірені шляхом порівняння даних з обох каналів вимірювання (датчики знаходяться в позиції як на рис. 7).
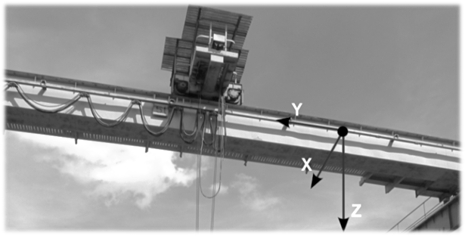
Рисунок 8 – Вісь вимірювальної системи для тест-об'єкта (Експериментальне дослідження крана – OBRDiUT "Detrans" в Bytom)
Для того, щоб порівняти сигнали обох каналів вимірів були проведені дві чисельні оцінки [7, 8, 9, 10]:
- середній рівень вібрації:
 (1)
(1)
де:
T – період вібрації [s];
x – сигнал вібрації (прискорення) [ms^-2];
t – час [s].
- RMS значення вібрації:
 (2)
(2)
Коефіцієнти для сигналу вібрації описується формулами (1-2), отримані шляхом вимірювання з обох вимірювальних схем для осі Z, що показано на малюнку 9.
Рисунок 9 – Короткий опис: середній рівень вібрації і середньоквадратичного значення вібрації для вимірювання каналів (відповідно коми визначити тест Ні (таблиця 3))
Як можна бачити на рис. 9, значення, отримані з двох каналів вимірювання знаходяться близько один до одного і піддаються подальшому аналізу, є дані, отримані від вимірювальної схеми на основі набору Phidget 1056 датчиків.
5. Результати експериментальних випробувань
Після перевірки даних, отриманих від двох незалежних каналів були проведені вимірювання попереднього аналізу отриманих сигналів. З цією метою значення прискорення були перевірені, і, зокрема, максимальне значення було розглянуто за умови сигналу спектрального аналізу. За допомогою FFT були перевірені максимальні значення прискорення, пов'язані з процесом підйому або з іншими компонентами, такими, як диск (механізмам), представляючи спотворення сигналу.
Для визначення частоти вібрації в точці вимірювання (рис. 7 осі Z), треба скористатись методом перетворення Фур'є. Побудова вихідного перетворення в залежності від частоти були отримані амплітуда сигналу вібрації і частота вібрації. На основі роботи [11, 12, 14, 16] був створений скрипт для виконання ШПФ для вибраного діапазону даних. Цей скрипт виконує N-кількість перетворень з частотою дискретизації 250 [Гц]. Як і у роботі [12], існує симетрія у результатів, FFT малює тільки половину даних, які у даному випадку знаходиться в діапазоні від 0 [Гц] до 125 [Гц]. Для того, щоб захистити від явища спектрального витоку, віконні операції з використанням вікна Хеммінга була застосована у відповідності з роботою [12], які зводять до мінімуму розриви в кінцевих точках інтервалу вибірки. Результати представлені в таблиці 4. Через низьке значення, дослідження підйому та опускання без навантаження гак були опущені. Зразкові результати вимірювання прискорення та амплітудні спектри показані на малюнках 10-12. Результати були зазначені на осі Z, що представляє напрямок вібрації і стосуються навантаження Q.
Таблиця 4 – Резюме основних значень частоти отримані за допомогою спектрального витоку
На малюнку 10а показано характеристики прискорення балки при зниженні навантаження удару об землю. Було визначено, що вплив навантаження на землю викликає вібрацію поверхні призводить до збільшення рівня амплітуди прискорення балок -2,3 - 2,2 [мс^-2]. Сигнал описаний в малюнку 10б і показаний амплітудний спектр швидкого перетворення Фур'є, домінуючої частоти значення 4,58 [Гц], що відповідає частоті коливань, пов'язаних з підйомним навантаженням, які підтверджують, що прискорення значення, отримані на осцилограмі згідно з вібрацією, викликані шляхом підйому або опускання вантажів.
 б)
б)
Рисунок 10 – а) Траверси прискорення характеристик при зниженні навантаження удару об землю (Таблиця 4 - пункт 4.1), б) БПФ спектру сигналу реєструється при зниженні навантаження удару об землю (Таблиця 4 - пункт 4.1)
Приклади результатів тестів для випадку, коли навантаження знімається в той час як початкова умова ослабленої або жорсткої мотузки, показано на малюнку 11.
 б)
б)
Рисунок 11 – а) характеристика Траверси прискорення при підйомі вантажу (початкова умова - вільні мотузки) (Таблиця 4 - пункт 3.1), б) Траверси розгінних характеристик при підйомі вантажу (початкова умова - попередньо натягнутої мотузки) (Таблиця 4 - пункт 5.2)
Було відзначено, що зняття навантаження з попередньо напружених канатів збільшує амплітуду прискорення до значення (-3,75 - 2,27) [мс^-2]. У разі зняття навантаження з попередньо напружених канатів досягається прискорення дещо менше (-0,78 - 0,91) [мс^-2]. Для вищезгаданих випадках цифри 12а і 12b показує, амплітуда спектра швидкого перетворення Фур'є, де частота коливань досягає значення 3,65 [Гц] і 3,72 [Гц]. Обидва значення відповідають частоті коливань, знявши навантаження по осі Z.
 б)
б)
Рисунок 12 – а) БПФ спектру амплітуди сигналу зареєстрований підйом навантаження (початкова умова - вільні мотузки) (Таблиця 4 - пункт 3.1), б) БПФ спектру амплітуди сигналу зареєстрований підйом навантаження (початкова умова - попередньо натягнутої мотузки) (Таблиця 4 - пункт 5.2)
6. Висновки
Представлена експериментальна бездротова вимірювальна система, призначена для випробування динамічних характеристик крана, а саме – для визначення прискорення цих характеристик. Регулярні навантаження необхідні для визначення розмірів у відповідності з європейськими стандартами. Крім того, система має високу точність і оснащена бездротовою передачою даних.
Вимірювальна головка має оригінальну, просту конструкцію, і її встановлення на кран не вимагає ніяких змін в структурі, крім того, вона дозволяє можливість встановлювати на будь-яку металеву частину крана.
Спектр ШПФ амплітуди, представляє діапазон 3,6-4,6 [Гц]. Ці значення аналогічні тим, які визначаються аналітичними дослідженнями – 4,14 [Гц]. Це показує, що прискорення значення, відповідні заданим значенням частоти, пов'язані з процесом зняття навантаження.
Список посилань
1. Binkowski W. i in.: Badania rozkladow obciazen ruchowych dwu suwnic pomostowych II i IV grupy natezenia pracy. Praca badawcza Instytutu Podstaw Konstrukcji Maszyn Politechniki Slaskiej o symb. NB-39/RMK/74/75. Gliwice 1975.
2. Chmurawa M., Gaska D.: Badanie dynamiki podnoszenia ladunku w suwnicy. Zeszyty Naukowe Politechniki Slaskiej, seria Transport z. 53. Gliwice, 2004, s. 35-42.
3. Gallos M., Kulig J.: Badania glowne obciazen eksploatacyjnych suwnic bramowych. Praca bad. OBRDiUT „Detrans” o symb. BW-471044. Bytom 1975-1978.
4. Markusik S., Gaska D., Witaszek K.: Badania przyspieszen i poziomow drgan w suwnicach pomostowych, Zeszyty naukowe politechniki slaskiej – Transport z.63, Wydawnictwo Politechniki Slaskiej, Gliwice 2007, s. 181-186.
5. Piatkiewicz A., Sobolski R.: Dzwignice. WNT, Warszawa 1978.
6. PN-EN 13001-2:2011: Bezpieczenstwo dzwignic, ogolne zasady projektowania; Czesc 2: Obciazenia.
7. Cempel C.: Diagnostyka wibroakustyczna maszyn. PWN, Warszawa 1989.
8. Cempel C.: Podstawy wibroakustycznej diagnostyki maszyn. WNT, Warszawa 1982.
9. Grybos R.: Drgania maszyn. Wydawnictwo Politechniki Slaskiej, Gliwice 2008.
10. Kucharski T.: System pomiaru drgan mechanicznych. WNT, Warszawa 2002.
11. Haniszewski T.: Badanie zjawisk dynamicznych podczas podnoszenia ladunku na wybranym modelu suwnicy pomostowej. Praca Magisterska, Katowice 2009.
12. Lyons R. G. : Wprowadzenie do cyfrowego przetwarzania sygnalow. WKL, Warszawa 2006.
13. Burdzik R.: Wplyw predkosci obrotowej silnika na drgania przenoszone na konstrukcje pojazdu. Zesz. Nauk. PSl. nr 1860 Transp. 2011 z. 72, s. 13-23.
14. Konieczny L., Burdzik R., Sleziak B.: Usage Short Time Fourier Transform in identification of vehicle shock absorber technical conditions researched by force vibration method. Probl. Transp. 2009 t. 4 z. 3, cz. 1, s. 71-77.
15. http://www.phidgets.com/docs/Programming_Resources, 2012-09-16.
16. Wilk A., Figlus T.: Influence of design and operations factors on vibroactivity of gearbox. X International Technical Systems Degradation Conference. TSD International Conference, Liptovsky Mikulas, 27-30 April 2011.
17. Phidget 1056 http://www.phidgets.com/products.php?product_id=1056_0, 05.102.2012.