
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Загальна постанова задачі
- 2. Огляд існуючих рішень
- 3. Система стабілізації орієнтування трикоптера
- Висновки
- Перелік посилань
Вступ
У сучасному світі безпілотні літальні апарати можуть використовуватися в таких областях, як виявлення наземних і літальних об'єктів, можуть бути застосовані в різних сферах життєдіяльності, таких як аерофотозйомка (геодезія, картографія), метеорологія, охорона важливих об'єктів, виявлення пожеж, у військовій промисловості (відео спостереження, виявлення наземних, літальних об'єктів). Актуальність розробки подібних пристроїв підтверджується динамічно зростаючим ринком і сферою вирішуваних завдань. [ 1 ]
1. Загальна постанова задачі
При створенні безпілотних літальних апаратів вирішується ряд складних завдань:
1. Визначення орієнтації (кутів по трьох осях відносно землі) і стабілізація по них;
2. Визначення висоти і стабілізація по ній;
3. Визначення координат і політ по заданих точках;
4. Політ трікоптера із заданою швидкістю.
Трікоптер – це керований дистанційно або автономний безпілотний трьохроторний літаючий апарат з трьома гвинтами (рис. 1).
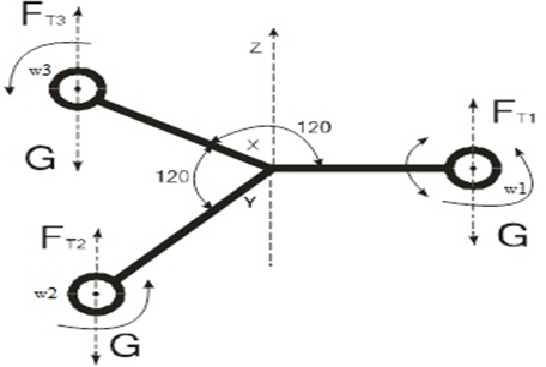
Рисунок 1 – Модель трикоптера
FT1, FT2, FT3–тяга, створена першим, другим і третім гвинтом відповідно; w1, w2, w3–частоти обертання роторів відповідних двигунів; G–сила земного тяжіння У моделі трікоптера один з гвинтів є хвостовим. Даний гвинт забезпечує маневреність і стабілізацію трікоптера в просторі. Для компенсації обертального моменту, створюваного при обертанні гвинтів, два гвинти обертаються в одному напрвленіі, а третій – у протилежному. Для стабілізації трікоптера в просторі хвостовий гвинт змінює кут нахилу своєї площини обертання. Для цього використовується серво-повотротний механізм.
2. Огляд існуючих рішень
Управління трікоптером відноситься до класу управління мультіроторнимі системами. Структурна схема управління трікоптером показана на рис.2
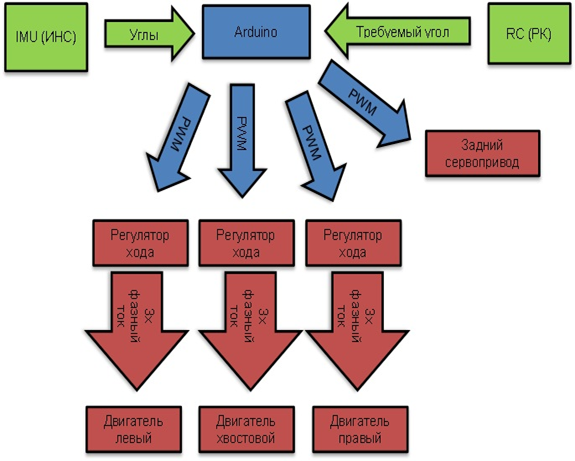
Рисунок 2 – Структурная схема управления трикоптером[4]
Елементи даної структурної схеми:
РК – ручний контролер. Для завдання режиму роботи об'єкта використовується радіопередавач. Встановлюваний на мультикоптері приймач отримує сигнали, що посилаються з пульта управління (передавача) оператором і перетворює їх в електричні сигнали, які комутує мікроконтролер, посилаючи керуючі сигнали бесколлектрним двигунам. Для управління мікрокоптером використовується підсумований сигнал (так званий PPM – Pulse-position modulation). Стандартні, наявні в продажі приймачі та передавачі призначені для управління виконавчими механізмами літаючих моделей літаків і вертольотів та ін радіокерованих моделей. Управління у них відбувається за так званим сигналом PWM (Pulse-width modulation) Кожен передавач має певне число каналів (7, 9, 12), якому відповідають виходи для виконавчих механізмів приймача. На мікрокоптере ж до основної плати (FlightCtrl) підходить лише один (крім GND і 5В) керуючий провід, за яким передається підсумований сигнал PPM, що містить в собі дані про всіх сигналах, що передаються з передавача. Для отримання підсумованого сигналу можливі такі варіанти конструкції:
А) Установка між стандартним приймачем і основною платою (FlightCtrl) спеціального перетворювача сигналу PWM в сигнал PPM.
Б) встановлення замість приймача, комплекті з передавачем, приймача, спеціально розробленого для мікрокоптера.
Для управління мультикоптером може використовуватися фактично будь-який передавач, що має, як мінімум чотири керованих канали (два джойстика).[5]
Arduino – основна плата. Є центральною і обов'язковою частиною будь-якого мультіроторного літального апарату. Ця плата складається з головного процесора (у версії 2.0 мікроконтролер Atmega644P, у версії 2.1. – Мікроконтролер Atmega1284P) і з датчиків, які необхідні для забезпечення сталого польоту. [6]
ІНС – інерціальна навігаційна система - сукупність датчиків, які забезпечують необхідний режим роботи об'єкта. З усіх датчиків, датчики визначення положення моторів є найважливішими. Програмне забезпечення використовує їх, щоб визначити положення платформи в повітрі і дати команду на компенсацію зміни положення від зовнішніх збудників. Для кожної осі (x, y і z) необхідний один датчик. Зазвичай ці датчики називають гіроскопами або Gyros, і вони вимірюють нахил у градусах за секунду. Інший датчик - датчик прискорення. Він вимірює прискорення апарату у всіх трьох осях. Вертикальний датчик прискорення також у змозі виміряти кут нахилу мікрокоптера по відношенню до поверхні землі. Вони називаються акселерометрами або Accellerometer (ACC). Мікрокоптер може літати і без цього датчика, але з ним мікрокоптер завжди буде намагатися займати положення, паралельне землі. Для вимірювання висоти польоту об'єкта на основній платі встановлюється датчик висоти (MPX4115A). При його активації апарат набуває здатність летіти весь час на одній і тій же висоті.[7]
Використовуються безколекторні двигуни постійного струму. У конструкціях мультіроторних літальних апаратів використовуються безколекторні електродвигуни. Вони володіють видатними характеристиками і надійністю у зв'язку з відсутністю тертьових вузлів (щіток) за допомогою яких передається струм. На відміну від звичайного електродвигуна, у якого є рухома частина – ротор і нерухома – статор, у безколекторного двигуна рухомою частиною є якраз статор з постійними магнітами, а нерухомою частиною – ротор з обмотками трьох фаз. Для того, щоб змусити обертатися таку систему, необхідно здійснювати в певному порядку зміну напрямку магнітного поля в обмотках ротора – тоді постійні магніти статора будуть взаємодіяти з магнітними полями ротора і рухливий статор прийде в рух. Це рух засноване на властивості магнітів з однойменними полюсами відштовхуватися, а з різнойменними – притягуватися.[8]
Управління зміною магнітних полів в обмотках ротора здійснюється спеціальним пристроєм – контролером, які представляють собою досить складний пристрій, комутуюче значні струми з високою швидкістю. Таким чином, для використання безколекторних двигунів обов'язково необхідний контролер. Дана обставина здорожує використання безколекторних двигунів. [10]
Задній сервопривід – сервоповоротний механізм, який використовується для зміни кута площини обертання хвостового двигуна. Більшість сервоприводів використовують три дроти для роботи. Провід для харчування, зазвичай 4.8В або 6В, загальний провід (земля) і сигнальний провід. Керуючий сигнал передає інформацію про необхідному положенні вихідного валу. Вал пов'язаний з потенціометром, який визначає його положення. Контролер у СЕРВОПРИВОДИ по опору потенціометра і значенням керуючого сигналу визначає, в який бік потрібно обертати мотор, щоб отримати потрібне положення вихідного валу. Чим вище напруга живлення сервоприводу, тим швидше він працює і більший момент розвиває. Сервоприводи можуть мати кут повороту вала 60, 90, 180 градусів. Кут повороту обмежується електронікою і механічно. Існують сервоприводи без обмеження, тобто обертаються на 360 градусів. Якщо у Вас є сервопривід з робочим діапазоном 60 градусів, то розширити його можна тільки змінивши конструкцію сервомашинки. Іноді можна збільшити діапазон спеціальним чином спотворивши керуючий сигнал. Але це нестандартний і ненадійний спосіб.[9]
3. Система стабілізації орієнтування трикоптера
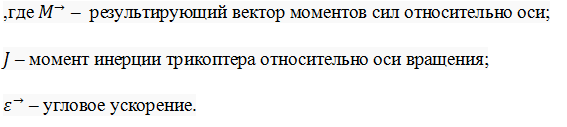
Алгоритм стабілізації кута трікоптера зводиться до проектування регулятора і алгоритму фільтрації. Для проектування системи стабілізації кута необхідно отримати математичний опис об'єкта управління. Керуючи моментом сил (створюються тягою двигунів і поворотом сервоприводу) щодо осі обертання, отримаємо необхідне значення кута. Для опису об'єкта використовується основне рівняння динаміки обертання тіл:
 ,(1)
,(1)
Передатна функцыя об'єкта керування:
 ,(2)
,(2)
Из (2) робимо висновок, що при стабілізації кута орієнтації, трикоптер можна описати, як об'єкт 2-го порядку.
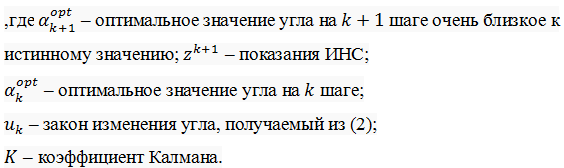
Для проектування фільтра Калмана використовуємо рівняння динаміки об'єкта і показань ІНС:
 ,(3)
,(3)
 [3]
[3]
Рисунок 3 – Диаграмма стабилизації кута трикоптера
(анимація: 4 кадри, 10 циклів повторення, 12 кілобайт)
Висновки
У процесі дослідження розглянуто існуючі методи реалізації безпілотних літальних апаратів. Виділено основні завдання, вирішення яких призведе до досягнення мети.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2013 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць XIII науково-технічної конференції аспірантів та студентів в м. Донецьку 14-17 травня 2013 р. – Донецьк, ДонНТУ, 2013. – 441 с
- Использование инерциальной навигационной системы (ИНС) с несколькими датчиками на примере задачи стабилизации высоты квадрокоптера [Электронный ресурс].– Режим доступа: http://habrahabr.ru/post/137595/
- Стабилизация полета трикоптера [Электронный ресурс].– Режим доступа: http://ea.donntu.ru:8080/jspui/bitstream/123456789/20644/1/%D0%91%D0%B5%D0%B7%D1%80%D1%83%D0%BA%20%D0%A5%D0%BE %D1%80%D1%85%D0%BE%D0%B4%D0%B8%D0%BD%20%D0%A1%D1%82%D0%B0%D0%B1%D0%B8%D0%BB%D0%B8%D0%B7%D0%B0%D1%86%D0%B8%D1 %8F%20%D0%BF%D0%BE%D0%BB%D0%B5%D1%82%D0%B0.pdf
- Проект трикоптер [Электронный ресурс].– Режим доступа: http://tm.spbstu.ru/%D0%9F%D1%80%D0%BE%D0%B5%D0%BA%D1%82_%22%D0%A2%D1%80%D0%B8%D0%BA%D0%BE%D0%BF%D1%82%D0%B5%D1%80%22
- Приемник-передатчик [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/radio
- Основная плата [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/mainboard
- Плата навигации [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/platanavi
- Бесколлекторные двигатели [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/bl-motors
- Типы сервоприводов [Электронный ресурс].– Режим доступа: http://www.amg-rc.ru/node/50
- Контроллеры бесколлекторных двигателей [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/controllers