
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Общая постановка задачи
- 2. Обзор существующих решений
- 3. Система стабилизации ориентации трикоптера
- Выводы
- Список источников
Введение
В современном мире беспилотные летательные аппараты могут использоваться в таких областях, как обнаружение наземных и летательных объектов, могут быть применены в различных сферах жизнедеятельности, таких как аэрофотосъемка (геодезия, картография), метеорология, охрана важных объектов, обнаружение пожаров, в военной промышленности (видео наблюдения, обнаружения наземных, летательных объектов). Актуальность разработки подобных устройств подтверждается динамично растущим рынком и сферой решаемых задач.[1]
1. Общая постановка задачи
При создании беспилотных летательных аппаратов решается ряд сложных задач:
1. Определение ориентации (углов по трем осям относительно земли) и стабилизация по ним;
2. Определение высоты и стабилизация по ней;
3. Определение координат и полет по заданным точкам;
4. Полет трикоптера с заданной скоростью.
Трикоптер – это управляемый дистанционно или автономный беспилотный трехроторный летающий апарат с тремя винтами (рис. 1).[2]
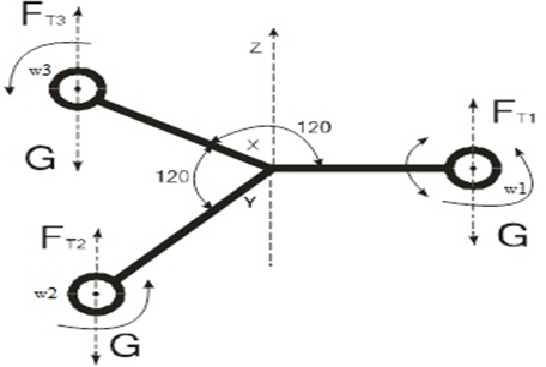
Рисунок 1 – Модель трикоптера
FT1, FT2, FT3 –тяга, созданная первым, вторым и третим винтом соответственно; w1, w2, w3 –частоты вращения роторов соответствующих двигателей; G-сила земного притяжения
В моделе трикоптера один из винтов является хвостовым. Данный винт обеспечивает маневренность и стабилизацию трикоптера в пространстве. Для компенсации вращательного момента, создаваемого при вращении винтов, два винта вращаются в одном напрвлении, а третий – в противоположном. Для стабилизации трикоптера в пространстве хвостовой винт изменяет угол наклона своей плоскости вращения. Для этого используется серво-повотротный механизм.
2. Обзор существующих решений
Управление трикоптером относится к классу управления мультироторными системами. Структурная схема управления трикоптером показана на рис.2
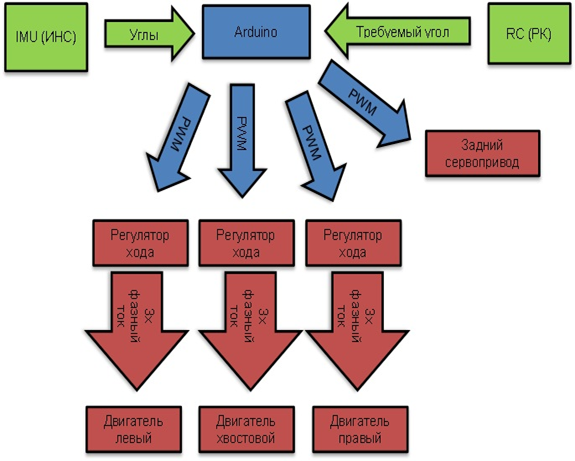
Рисунок 2 – Структурная схема управления трикоптером[4]
Элементы данной структурной схемы:
РК – ручной контроллер. Для задания режима работы объекта используется радиопередатчик. Устанавливаемый на мультикоптере приемник получает сигналы, посылаемые с пульта управления (передатчика) оператором и преобразует их в электрические сигналы, которые коммутирует микроконтроллер, посылая управляющие сигналы бесколлектрным двигателям. Для управления микрокоптером используется суммированный сигнал (так называемый PPM - Pulse-position modulation). Стандартные, имеющиеся в продаже приемники и передатчики предназначены для управления исполнительными механизмами летающих моделей самолетов и вертолетов и др. радиоуправляемых моделей. Управление у них происходит по так называемому сигналу PWM (Pulse-width modulation) Каждый передатчик имеет определенное число каналов (7, 9, 12), которому соответствуют выходы для исполнительных механизмов приемника. На микрокоптере же к основной плате (FlightCtrl) подходит всего один (кроме GND и 5В) управляющий провод, по которому передается суммированный сигнал PPM, содержащий в себе данные о всех сигналах, передаваемых с передатчика. Для получения суммированного сигнала возможны следующие варианты конструкции:
А) Установка между стандартным приемником и основной платой (FlightCtrl) специального преобразователя сигнала PWM в сигнал PPM.
Б) установка вместо приемника, комплектующегося с передатчиком, приемника, специально разработанного для микрокоптера.
Для управления мультикоптером может использоваться фактически любой передатчик, имеющий, как минимум четыре управляемых канала (два джойстика управления с подвижными осями).[5]
Arduino - the main board. Is a central and indispensable part of any multirotornogo aircraft. This board consists of a main processor (at version 2.0 microcontroller Atmega644P, at version 2.1. - Microcontroller Atmega1284P) and of the sensors that are needed to ensure sustained flight. [6]ИНС – инерциальная навигационная система – совокупность датчиков, обеспечивающих необходимый режим работы объекта. Из всех датчиков, датчики определения положения моторов являются самыми важными. Программное обеспечение использует их, чтобы определить положение платформы в воздухе и дать команду на компенсацию изменения положения от внешних возбудителей. Для каждой оси (x, y и z) необходим один датчик. Обычно эти датчики называют гироскопами или Gyros, и они измеряют наклон в градусах за секунду. Другой датчик - датчик ускорения. Он измеряет ускорение аппарата во всех трех осях. Вертикальный датчик ускорения также в состоянии измерить угол наклона микрокоптера по отношению к поверхности земли. Они называются акселерометрами или Accellerometer (ACC). Микрокоптер может летать и без этого датчика, но с ним микрокоптер всегда будет стараться занимать положение, параллельное земле. Для измерения высоты полета объекта на основной плате устанавливается датчик высоты (MPX4115A). При его активации аппарат приобретает способность лететь все время на одной и той же высоте.[7]
Используются бесколлекторные двигатели постоянного тока. В конструкциях мультироторных летательных аппаратов используются бесколлекторные электродвигатели. Они обладают выдающимися характеристиками и надежностью в связи с отсутствием трущихся узлов (щеток) посредством которых передается ток. В отличие от обычного электродвигателя, у которого имеется подвижная часть - ротор и неподвижная - статор, у бесколлекторного двигателя подвижной частью является как раз статор с постоянными магнитами, а неподвижной частью - ротор с обмотками трех фаз. Для того, чтобы заставить вращаться такую систему, необходимо осуществлять в определенном порядке смену направления магнитного поля в обмотках ротора - тогда постоянные магниты статора будут взаимодействовать с магнитными полями ротора и подвижный статор прийдет в движение. Это движение основано на свойстве магнитов с одноименными полюсами отталкиваться, а с разноименными - притягиваться.[8]
Управление сменой магнитных полей в обмотках ротора осуществляется специальным устройством - контроллером, представляющим собой довольно сложное устройство, коммутирующее значительные токи с высокой скоростью. Таким образом, для использования бесколлекторных двигателей обязательно необходим контроллер. Данное обстоятельство удорожает использование бесколлекторных двигателей.[10]
Задний сервопривод – сервоповоротный механизм, который используется для изменения угла плоскости вращения хвостового двигателя. Большинство сервоприводов используют три провода для работы. Провод для питания, обычно 4.8В или 6В, общий провод (земля) и сигнальный провод. Управляющий сигнал передает информацию о требуемом положении выходного вала. Вал связан с потенциометром, который определяет его положение. Контроллер в сервоприводе по сопротивлению потенциометра и значению управляющего сигнала определяет, в какую сторону требуется вращать мотор, чтобы получить нужное положение выходного вала. Чем выше напряжение питания сервопривода, тем быстрее он работает и больший момент развивает. Сервоприводы могут иметь угол поворота вала 60, 90, 180 градусов. Угол поворота ограничивается электроникой и механически. Существуют сервоприводы без ограничения, т.е. вращающиеся на 360 градусов. Если у Вас имеется сервопривод с рабочим диапазоном 60 градусов, то расширить его можно только изменив конструкцию сервомашинки. Иногда можно увеличить диапазон специальным образом исказив управляющий сигнал. Но это нестандартный и ненадежный способ.[9]
3. Система стабилизации ориентации трикоптера
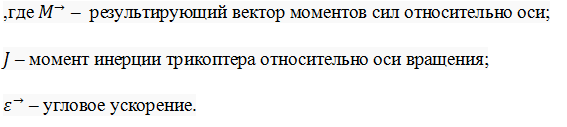
Алгоритм стабилизации угла трикоптера сводится к проектированию регулятора и алгоритма фильтрации. Для проектирования системы стабилизации угла необходимо получить математическое описание объекта управления. Управляя моментом сил (создаются тягой двигателей и поворотом сервопривода) относительно оси вращения, получим необходимое значение угла. Для описания объекта используется основное уравнение динамики вращения тел:
 ,(1)
,(1)
Передаточная функция объекта управления имеет вид:
 ,(2)
,(2)
Из (2) следует, что при стабилизации угла ориентации, трикоптер является объектом второго порядка.
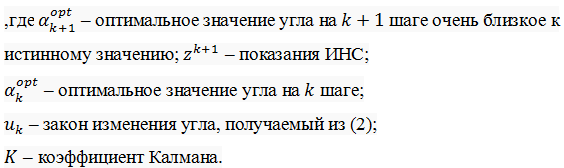
Для проектирования фильтра Калмана используем уравнения динамики объекта и показаний ИНС:
 ,(3)
,(3)
 [3]
[3]
Рисунок 3 – Диаграмма стабилизации угла трикоптера
(анимация: 4 кадра, 10 циклов повторения, 12 килобайт)
Выводы
В процессе исследования рассмотрены существующие методы реализации беспилотных летательных аппаратов. Выделены основные задачи, решение которых приведет к достижению цели.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2013 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.Список источников
- Автоматизація технологічних об’єктів та процесів. Пошук молодих. Збірник наукових праць XIII науково-технічної конференції аспірантів та студентів в м. Донецьку 14-17 травня 2013 р. – Донецьк, ДонНТУ, 2013. – 441 с
- Использование инерциальной навигационной системы (ИНС) с несколькими датчиками на примере задачи стабилизации высоты квадрокоптера [Электронный ресурс].– Режим доступа: http://habrahabr.ru/post/137595/
- Стабилизация полета трикоптера [Электронный ресурс].– Режим доступа: http://ea.donntu.ru:8080/jspui/bitstream/123456789/20644/1/%D0%91%D0%B5%D0%B7%D1%80%D1%83%D0%BA%20%D0%A5%D0%BE %D1%80%D1%85%D0%BE%D0%B4%D0%B8%D0%BD%20%D0%A1%D1%82%D0%B0%D0%B1%D0%B8%D0%BB%D0%B8%D0%B7%D0%B0%D1%86%D0%B8%D1 %8F%20%D0%BF%D0%BE%D0%BB%D0%B5%D1%82%D0%B0.pdf
- Проект трикоптер [Электронный ресурс].– Режим доступа: http://tm.spbstu.ru/%D0%9F%D1%80%D0%BE%D0%B5%D0%BA%D1%82_%22%D0%A2%D1%80%D0%B8%D0%BA%D0%BE%D0%BF%D1%82%D0%B5%D1%80%22
- Приемник-передатчик [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/radio
- Основная плата [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/mainboard
- Плата навигации [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/platanavi
- Бесколлекторные двигатели [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/bl-motors
- Типы сервоприводов [Электронный ресурс].– Режим доступа: http://www.amg-rc.ru/node/50
- Контроллеры бесколлекторных двигателей [Электронный ресурс].– Режим доступа: http://multicopter.ru/technical/controllers