
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження
- 3. Короткий огляд існуючих рішень
- 4. Основні принципи стабілізації польоту квадрокоптера
- 5. Експериментальні дослідження
- Висновки
- Список джерел
Вступ.
Новим напрямком у сучасному авіамоделізмі є побудова мультикоптерів – безпілотних літальних апаратів (БПЛА) з парною кількістю роторів, що обертаються діагонально в протилежних напрямках. У разі, коли двигунів чотири, такий БПЛА називається – квадрокоптер. На сьогодні головним трендом є створення невеликого безпілотного квадрокоптера. Основними причинами такого стану речей є можливість простого управління і маневреність. Квадрокоптер мають великий попит серед авіамоделістів, але також знаходять своє застосування і в професійній сфері, наприклад, поліції чи армії. Вже були помічені квадрокоптери, що доставляють пошту адресату, їх застосовують для панорамних зйомок важливих заходів.
1. Актуальність.
Необхідність стабілізації польоту квадрокоптера випливає з принципу
його роботи. Наприклад, стабільність польоту планера або літака
обумовлена їх стійкістю, тобто можливість відновлювати без втручання
пілота кінематичні параметри руху і повертатися до вихідного режиму
польоту після припинення дії збуджень. Квадрокоптер ж такою властивістю
не володіє і при найменшому зовнішньому впливі починається некероване
зниження
.
2. Мета і задачі дослідження.
Мета роботи – розробити та дослідити електронну систему стабілізації польоту квадрокоптера.
Основні задачі дослідження:
- Аналіз методів стабілізації польоту квадрокоптера.
- Дослідження і вибір інерційних датчиків.
- Аналіз наявних методів обробки даних, отриманих з інерційних датчиків.
- Створення алгоритму стабілізації на підставі даних досліджень.
- Розробка стендової моделі квадрокоптера.
Об'єкт дослідження: безпілотний літальний апарат – квадрокоптер.
Предмет дослідження: визначення абсолютного положення літального апарата в просторі (кути нахилу, висота, лінійні переміщення).
3. Короткий огляд існуючих рішень.
Абсолютно у всіх джерелах вказується, що мінімальний набір датчиків для квадрокоптера це: гіроскоп, акселерометр і магнітометр. Для деяких задач необхідно точно підтримувати висоту польоту апарату і відстежувати траєкторію польоту [1]. У таких випадках в доважок до вищеперелічених датчиків додаються блоки з висотоміром і GPS.
Для коректування отриманих значень кута з гіроскопа, користуються кількома рішеннями, наприклад використання ПІД-регулятора [2] або комплементарного фільтра [3]. Також данні можна фільтрувати за допомогою фільтра Калмана [4]. Найпопулярнішим всеж є використання комплементарного фільтра, через свою простоту.
Важливим питанням при стабілізації польоту квадрокоптера є збереження данних про поточне абсолютне положення апарата в просторі. Для цього користуються матрицею повороту, рівняннями Лагранжа або кватеріонамі [5].
4. Основні принципи стабілізації польоту квадрокоптера
Для того щоб ефективно стабілізувати квадрокоптер в польоті необхідно:
- Мати можливість визначення, в якому стані знаходиться система.
- Мати можливість надавати керуючий вплив на систему.
- Знати, в якому стані буде підтримуватися система.
Для визначення стану системи використовують різні датчики (гіроскоп, акселерометр, магнітометр, висотомір і т.д.) що забезпечують зворотний зв'язок. Керуючий вплив надають за допомогою зміни швидкості обертання двигунів. Наприклад, якщо БПЛА нахилився на лівий бік, то відповідно необхідно збільшити обороти лівого двигуна і зменшити обороти правого.
В першу чергу для стабілізації квадрокоптера, необхідно знати його абсолютне положення в просторі. Стабілізація здійснюється по ряду параметрів: висоті, кутах, лінійним перемещеніям.Так як квадрокоптер є літальним апаратом, для кутів нахилу використовуються авіаційні терміни: тангаж (у площині осі Х), крен (у площині осі У) і рискання (у площині осі Z, рис. 1).
Рисунок 1 – Анімація процесу повороту щодо осі Z (рискання). Основні параметри анімації: кількість кадрів – 6; обсяг – 157 КВ; кількість циклів повторення – 7
Самим раціональним рішенням для квадрокоптера, буде використання мікроелектромеханічних (MEMS) датчиків. Вони мають малі масогабаритні показники, високу швидкодію, функціональність і надійність, але і мають ряд недоліків, таких як залежність показань від температури, дрейф нуля, чутливість до вібрацій.
Для визначення крену, тангажу і рискання скористаємося гіроскопом, що є датчиком моментальних кутових швидкостей навколо осі. Для визначення кута за допомогою гіроскопа необхідно інтегрувати його покази, наприклад методом прямокутників [6]:
де α – поточне значення кута, α0 – попереднє значення кута, ω – поточне значення кутової швидкості, t – час між вимірами.
Тобто гіроскоп опитується постійно з інтервалом часу t, отримуємо моментальне значення кутової швидкості ω і обчислюємо поточне значення кута (a) додавши до попереднього значення кута (a0) прирощення за даний проміжок часу. Але при такому підході разом з приростом постійно сумується і помилка, що визвана похибкою гіроскопа. Це призведе до того, що з плином часу обчислена значення кута буде все далі і далі йти від реального значення (див. рис. 2).
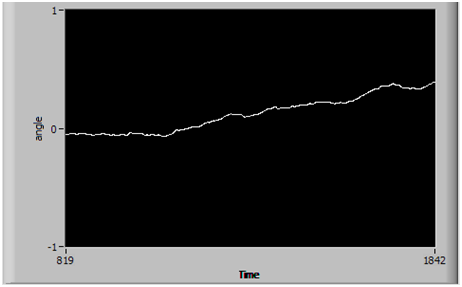
Рисунок 2 – Показання гіроскопа в стані спокою
При цьому самі показання гіроскопа мають великий розкид, тому рекомендується застосовувати усереднення показань, наприклад методом ковзаючої середньої. У даному алгоритмі використовувалося усереднення по 5 точкам. Якщо збільшити кількість точок, то система може реагувати на зміну кута з запізненням. Тому рекомендовану кількість точок не більше ніж 10.
Тому, періодично необхідно коректувати значення обчислених кутів. Для такого коректування використовується акселерометр, що вимірює проекцію прискорення на чутливу вісь. Іншими словами на виході акселерометра ми маємо значення суми проекції прискорення вільного падіння (G) і проекції абсолютного прискорення об'єкта на чутливу вісь (Рис. 3).
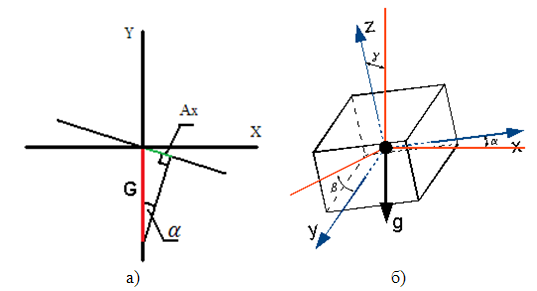
Рисунок 3 – Визначення кутів крену, тангажу і рискання акселерометром: а) одновимірний випадок, б) тривимірний випадок.
Якщо система знаходиться в статичному положенні або рухається з постійною швидкістю (власне прискорення дорівнює нулю), то кути нахилу розраховується за такими формулами (для тривимірного випадку):
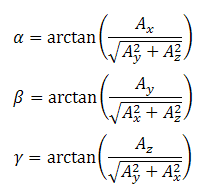
Для одновимірного випадку:
Тут Ax, Ay, Az – проекції вектора прискорення вільного падіння на осі X, Y, Z відповідно. Як відомо, тангенс дає кути від -90 до 90 градусів. Для отримання всіх 360, використовують функцію atan2.
Але акселерометр видає точні значення тільки в стані спокою. Під час руху до показань додається проекція вектора власного прискорення і значення кута «попливе». Саме тому в такій динамічній системі як квадрокоптер, акселерометр використовується лише для корекції значень кутів. Також звідси випливає ще одна особливість. Використовуючи лише акселерометр, скоректувати можливо лише кути крену і тангажу (вирівняти відносно горизонту). Але скорегувати кут рискання не представляється можливим через збіг осі обертання з вектором G. Для вирішення цієї проблеми використовують магнітометр (цифровий компас), який вводить ще один вектор в систему [7]. Магнітометр ж має свої недоліки, основний з яких – низька точність. Похибка може досягати 5 градусів, а поруч з двигунами квадрокоптера і силових ліній живлення ця похибка тільки зросте.
Також важливим елементом стабілізації польоту квадрокоптера є висотомір, необхідний для утримання необхідної висоти і безпечної посадки в автоматичному режимі. Ультразвукові висотоміри раціонально використовувати на відносно малих висотах (до 4 метрів), для великих висот використовуються лазерні або барометричні висотоміри. Високої точності від такої системи не потрібно, прийнятною є похибка в 1 сантиметр. Квадрокоптер доволі динамічна система, що зумовлює високі вимоги до швидкодії. Час вимірювання не повинно перевищувати 0.1 секунди.
У якості відправної точки при розробці використана публікація [8] з описом саморобного ультразвукового далекоміра.
Функціональна схема висотоміра представлена на рисунку 4. Мікроконтролер (МК) за допомогою таймера формує пакет з 8 імпульсів (оптимальна кількість встановлено експериментально) частотою 38 кГц. Слабкий відбитий сигнал посилюється електронним підсилювачем. Коефіцієнт підсилення підсилювача по напрузі підібраний дослідним шляхом і дорівнює 400. При менших значеннях коефіцієнта падає максимальна вимірювальна відстань до об'єкта, при великих – підсилювач входить у насищення на малих дистанціях до об'єкта. Посилений вимірювальний сигнал детектується і за допомогою аналого-цифрового перетворювача (АЦП) перетворюється на дискретний масив цифрових значень, розташований в пам'яті МК. На завершення циклу вимірювань МК знаходить максимальний елемент масиву і за його індексом розраховує дистанцію до об'єкта.
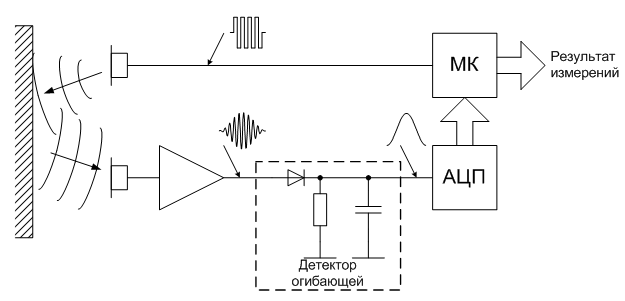
Рисунок 4 – Функціональна схема висотоміра
Роздільна здатність висотоміра визначається як відношення межі вимірювань до числа комірок вимірювального масиву. Таким чином, для забезпечення роздільної здатності в 1 см при межі в 4 му обсяг ОЗУ повинен бути не менше 400 байт. При цьому час перетворення АЦП не повинно перевищувати 62 мкс (25 мс/400).
5. Експериментальні дослідження.
Для коректування кутів скористаємося комплементарним фільтром, робота якого описується наступним виразом:

Ac і Ag значення кута нахилу, отримані за допомогою акселерометра і гіроскопа відповідно, A – значення скоректованого кута, K – коефіцієнт фільтра. Як видно, підсумкова величина кута нахилу є сумою інтегрованого значення гіроскопа і миттєвого значення акселерометра. По суті, головне завдання комплементарного фільтра полягає в тому, щоб нівелювати дрейф нуля гіроскопа і помилки інтегрування. Вага коригувальних значень визначається коефіцієнтом фільтра K.
Вибір коефіцієнта K залежить від величини дрейфу нуля гіроскопа і від швидкості накопичення помилок обчислення. Так, занадто велике значення коефіцієнта призведе до того, що на результат роботи фільтру буде сильно впливати вібрація корпусу квадрокоптера. Занадто ж мале, може виявитися недостатнім для ліквідації дрейфу нуля гіроскопа. Як правило, коефіцієнт фільтрації К підбирається при налаштуванні для кожного інклинометра виходячи з вищевказаних умов. Типове значення лежить в діапазоні від 0,05 до 0,15. У даній системі був заданий коефіцієнт фільтрації K комплементарного фільтра рівним 0,1.
На рисунку 5 наведен результат роботи фільтру для осі Х. Як видно, систему спочатку повернули на 26 градусів, потім ще на 6.
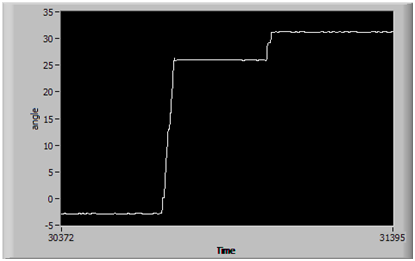
Рисунок 5 – Результат роботи комплементарного фільтра
Похибка відфільтрованого значення кута (Рис. 6) складає ± 0,05 °, що є відмінним результатом для задачі стабілізації польоту квадрокоптера.
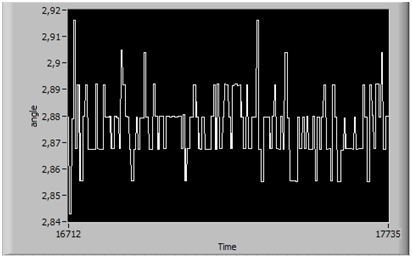
Рисунок 6 – Результат роботи комплементарного фільтра в стані спокою
Висновки
- Для стабілізації польоту квадрокоптера необхідно знати його абсолютне положення в просторі, особливо кути крену, тангажу і рискання.
- Для визначення кутів, одного гіроскопа недостатньо. Для отримання точних даних необхідно вводити корекцію за допомогою акселерометра і магнітометра.
- Використання комплементарного фільтра має високу ефективність, при цьому не витрачає багато машинних ресурсів.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2013 року.
Список використанних джерел
1. Система управления БПЛА для полета на
малых высотах/ Т.В. Белоцерковский –
Национальный технический университет Украины.
2. Building and controlling the Quadrocopter –
Pavel Chmelar –
Number 5, Volume VI, December 2011.
3. Design and control of quadrotors with application to autonomous
flying –
Samir BOUABDALLAH –
ingenieur d'etat, Universite Aboubekr Belkaid, Tlemcen, Algerie
de nationalite algerienne
4. An Introduction to the Kalman Filter –
Greg Welch, Gary Bishop –
Department of Computer Science. University of North Carolina at Chapel
Hill Chapel Hill, NC 27599
– 3175 Updated: Monday, July 24, 2006.
5. Разработка управляющих программ промышленных роботов/ А.С. Климчик
Р.И. Гомолицкий Ф.В. Фурман К.И. Сёмкин –
Курс лекций для студентов –
C. 131
6. Самарский А.А., Гулин А.В. Численные методы: Учеб. пособие для
вузов. – М.: Наука. Гл. ред. физ-мат. лит., 1989. – 432 с.
7. Основы построения бесплатформенных инерциальных систем/ В.В.Матвеев,
В.Я.Располов – СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ
«Электроприбор», 2009. – 280 с.
8. Ampersant [Электронный ресурс]: Ультразвуковой дальномер –
Электронные данные. – Режим
доступа:http://www.ampersant.ru/ultra/Дата доступа: апрель 2013.
– Загл. с экрана.
9. Разработка ультразвукового измерителя дальности / А.В. Бурдуков //
Дипломный проект Государственный университет аэрокосмического
приборостроения. – 2010. – С. 17 – 22.
10. Strapdown inertial navigation system. Part 1 –
Navigation equations –
Albert Ortyl, Zdzislaw Gosiewski –
Journal of thheoretical and applied mechanics –
1,36,1998 –
C.83–96.