
Реферат за темою випускної роботи
Зміст
- ВСТУП
- 1. АКТУАЛЬНІСТЬ ТЕМИ
- 2. АНАЛІЗ ОБ’ЄКТА ДОСЛІДЖЕННЯ
- 2.1 Діагностування стану каналу зв'язку
- 2.2 Концепція пристрою діагностування стану каналу зв’язку на основі вимірювання параметрів сигналу. Обмеження
похибка - час вимірювання
- 3. АНАЛІЗ ІСНУЮЧИХ МЕТОДІВ ВИМІРЮВАННЯ ЧАСТОТИ В ТКС
- 4. МЕТОД ВИМІРЮВАННЯ ЧАСТОТИ ЗА ДОПОМОГОЮ РАЦІОНАЛЬНИХ НАБЛИЖЕНЬ
- ВИСНОВКИ
- ПЕРЕЛІК ПОСИЛАНЬ
ВСТУП
В сучасних телекомунікаційних системах найчастіше присутні зміни частоти несучого сигналу, причинами яких є як особливості алгоритмів їх функціонування (періодичні стрибки по частоті, у зв’язку з чим відбувається перехід приймача з одного частотного діапазону роботи на іншій - frequency hopping, WiMAX), так і вплив зовнішніх факторів (ефект Доплера при переміщенні передавача і / або приймача, вплив зовнішніх шумів та шумів апаратури). Все це призводить до того, що теоретичні розрахунки і моделі в багатьох аспектах не відповідають реальним процесам, що існують в телекомунікаційних системах та мережах. Тому як на етапі побудови системи, так і на етапі її функціонування (для діагностування стану обладнання) однією з найважливіших фаз є вимірювання параметрів сигналів, що передаються на різних ділянках, проведення збору та аналізу отриманої інформації та ідентифікація існуючих проблем. Однак виявлення недоробок та проблемних ділянок неможливе без отримання достовірної та актуальної інформації.
Тематика даної наукової роботи присвячена напрямку збору інформації про параметри сигналу в каналі зв’язку з певною точністю в умовах обмеженого часу та задачі оцінювання частоти на основі цих даних.
1 АКТУАЛЬНІСТЬ ТЕМИ
Актуальність наукової роботи полягає у пошуку методів вирішення фундаментальної проблеми обмеження похибка – час вимірювання
в аспекті задачі підвищення точності вимірювання частоти за обмежений час, що надалі може бути використано для подальшого діагностування стану телекомунікаційного каналу зв’язку.
Мета роботи - підвищення точності вимірювань частоти в умовах обмеженого часу вимірювання.
Для досягнення поставленої мети треба вирішити наступні задачі:
- Сформувати концепцію діагностування стану телекомунікаційного каналу зв’язку на базі вимірювання частоти.
- Обгрунтувати вимоги, що висуваються до процесу вимірювання частоти.
- Розглянути існуючі методи вимірювання частоти в аспекті обмеження
похибка – час вимірювання
. - Виконати структурно – алгоритмічний синтез схеми приладу вимірювання частоти.
Методика дослідження: математичні методи, структурно-алгоритмічний синтез.
2 АНАЛІЗ ОБ’ЄКТА ДОСЛІДЖЕННЯ
2.1 Діагностування стану каналу зв’язку
Прикладом систем, де існує необхідність вимірювання частоти, що досить швидко змінюється, є GPS. Супутникова радіонавігаційна система або, як вона ще називається, глобальна система позиціонування GPS (Global Positioning System) забезпечує високоточне визначення координат і швидкості об’єктів у будь-якій точці земної поверхні, в будь-який час доби, в будь-яку погоду, а також точне визначення часу. У навколоземному просторі розгорнута мережа штучних супутників Землі (ШСЗ), що рівномірно покривають
всю земну поверхню. Орбіти ШСЗ обчислюються з дуже високою точністю, тому в будь-який момент часу відомі координати кожного супутника. Радіопередавачі супутників безперервно випромінюють сигнали в напрямку Землі. Ці сигнали приймаються GPS-приймачем, що знаходиться в певній точці земної поверхні, координати якої потрібно визначити. У приймачі вимірюється час поширення сигналу від ШСЗ і обчислюється дальність супутник-приймач
. Оскільки для визначення місця розташування точки потрібно знати три координати (плоскі координати X, Y і висоту H), то в приймачі повинні бути виміряні відстані до трьох різних ШСЗ. Передавальна апаратура супутника випромінює синусоїдальні сигнали на двох несучих частотах: L1 = 1575,42 МГц і L2 = 1227,6 МГц. Перед цим сигнали модулюються так званими псевдовипадковими цифровими послідовностями. При цьому частота L1 модулюється двома видами кодів: C/A-кодом (код вільного доступу) і P-кодом (код санкціонованого доступу), а частота L2 - тільки P-кодом. Несучі частоти теоретично незмінні, однак внаслідок руху супутника і GPS приймача один щодо одного виникає ефект Доплера. Крім того, швидкість поширення електромагнітної хвилі непостійна і залежить від властивостей середовища. В даному випадку важлива траекторія проходження сигналу і властивості атмосфери (її температура, склад, диелектрична проникність). У зв’язку з неоднорідністю атмосфери виникає ефект тропосферного поширення сигналу. Відбуваються зміни швидкості поширення, частоти і траєкторії сигналу, що приймається. Зміна траекторії променя становить десяті частки градуса, але за рахунок відстані від супутника до поверхні Землі ці спотворення призводять до значного впливу на кінцевий результат. У зв’язку з цим необхідно проводити періодичні вимірювання частоти і її моніторинг для підвищення точності результатів визначення місцеположення [1,2].
Для діагностування стану каналу зв’язку у складі телекомунікаційної системи необхідно проводити досить часті вимірювання з високою точністю. Вимоги до точності обумовлюються відповідними стандартами [3]. Вимога до часу вимірювання виникає внаслідок того, що важливі для аналізу швидкі зміни частоти будуть усереднені при тривалому періоді вимірювання. Більш конкретні обмеження по часу вимірювання можна отримати з теореми Котельникова, тобто виміри повинні проводитися з частотою, що не менш ніж у два рази перевищує максимально необхідну для спостереження частоту відхилення вимірюваного параметра від теоретичного. По суті передбачається визначати тремтіння (або джиттера) (див. рис. 1) частоти щодо її номінального значення і аналіз виміряного джиттера в частотній області (тому що одним з його найбільш важливих при діагностуванні обладнання параметрів є частота), при цьому чим частіше будуть проводитися вимірювання частоти розглянутого сигналу, тим більш високочастотні складові джиттера частоти зможуть бути виявлені.

Рисунок 1 – Формування джиттера сигнала
(анімація: 7 кадрів, затримка між кадрами 1,5 с, кількість циклів повторення — 5, розмір 49 Кбайт, створена за допомогою Gif Animator )
На стан каналу зв’язку впливає безліч факторів і причин. До них можна віднести параметри приймально-передавального обладнання, які залежать від його стану, параметри середовища поширення сигналу, які постійно змінюються під впливом зовнішніх факторів. Однак весь цей вплив відображається на сигналі і по його випадковим змінам можна, в свою чергу, оцінювати і прогнозувати стан обладнання і його відмови [4].
2.2 Концепція пристрою діагностування стану каналу зв’язку на основі вимірювання параметрів сигналу. Обмеження похибка - час вимірювання
Виходячи з вищесказаного, можна сформувати концепцію пристрою діагностування стану системи на основі аналізу джиттера частоти (див. рис. 2).

Рисунок 2 – Концепція пристрою діагностування стану каналу зв’язку
Досліджуваний сигнал надходить на вхід вимірювача частоти, який протягом деякого обмеженого проміжку часу встановлює усереднене значення частоти за цей період. Формується вибірка значень частоти. Складність даного етапу полягає в тому, що проміжок часу, що необхідний вимірювачу частоти для визначення шуканого значення повинен бути досить малий для того, щоб були зафіксовані швидкі зміни частоти, і при цьому дозволяв проводити вимірювання з необхідною точністю, бо в іншому випадку весь процес втрачає сенс.
На наступному етапі проводиться обробка отриманих раніше даних. Визначається джиттер значень частоти, його максимальне і мінімальне значення для виборки, а також СКВ. Через те, що джиттер містить в загальному випадку в собі як періодичну, так і випадкову складові, то для аналізу і обчислень доцільно застосувати апарат математичної статистики.
Найбільш інформативним серед параметрів і характеристик джиттера з точки зору діагностування стану системи є його частота. Тому далі сукупність отриманих амплітудних значень джиттера переноситься в частотну область і проводиться аналіз спектра джиттера.
Як відомо, сигнал може розглядатися в різних формах подання: у часовій і в частотній областях. Зв’язок здійснюється за допомогою перетворення Фур’є [4]. Однак даний математичний апарат передбачає наявність нескінченної за часом реалізації сигналу, що в реальних системах є нездійсненною умовою і суперечить самому принципу передачі інформації, бо інформативними є лише такі параметри сигналу, що змінюються в часі (у відповідності з певними правилами). Оперування обмеженими реалізаціями сигналів призводить до розмиття
спектру сигналу, збільшення його ширини, а, отже, при вимірюванні частоти, до підвищення похибки результатів (див. рис. 3).
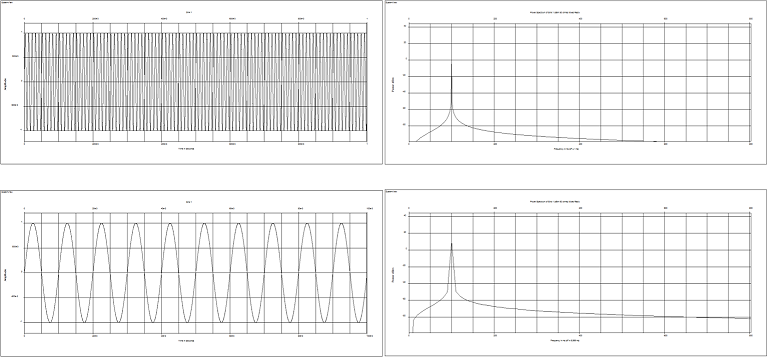
Рисунок 3 – Приклад формування спектрів різних за часом реалізацій сигналу
Все вищесказане приводить нас до формування фундаментального обмеження похибка - час вимірювання
. Його суть полягає в тому, що в класичних методах вимірювання частоти для підвищення точності результатів необхідно збільшувати час цього вимірювання, тобто підвищувати тривалість розглянутої реалізації. І навпаки, зниження часу вимірювання призводить до зниження точності вимірювання частоти. Обійти дане обмеження неможливо, можна лише знизити його вплив за допомогою удосконалення методів вимірювання частоти (застосування зважуючих вікон, використання більш придатних для даного випадку методів).
З усього вищесказаного випливає, що результати переходу при аналізі джиттера з часової в частотну область будуть прямо залежати від того, наскільки малий був інтервал вимірювання частоти вихідного сигналу. Тобто, чим менше був інтервал, тим більш високочастотні складові в спектрі джиттера ми зможемо спостерігати. Збільшення інтервалу буде приводити до того, що найбільш швидкі коливання частоти вихідного сигналу будуть усереднені. У результаті енергія цих високочастотних складових в спектрі джиттера буде розподілена між низькочастотними складовими, що призведе до можливості аналізу джиттера і його складових тільки в цій області спектра.
Переведення значень з часової області в частотну по суті є завершенням роботи пристрою. Останнім етапом є надання отриманих результатів у зручній для користувача формі. Далі вже відповідним фахівцем проводиться їх аналіз, визначення поточного стану системи і пошук методів вирішення проблеми.
3 АНАЛІЗ ІСНУЮЧИХ МЕТОДІВ ВИМІРЮВАННЯ ЧАСТОТИ В ТКС
Апаратура для частотно-часових вимірювань утворює єдиний комплекс приладів, що забезпечує можливість проведення вимірювань з безпосередньою їх прив'язкою до Державного еталону частоти і часу. Основними вимірювальними приладами і засобами вимірювань частоти є [5,6]:
- осцилографи;
- приймачі сигналів еталонних частот та компаратори;
- перетворювачі частоти сигналів;
- вимірювачі частоти резонансні;
- вимірювачі частоти на основі методу заряду-розряду конденсатора;
- вимірювачі частоти цифрові;
- цифрові вимірювачі частоти та інтервалів часу.
Залежно від діапазону невідомих частот, допустимої похибки і необхідної швидкості роботи на практиці застосовують різні методи вимірювання частоти, наприклад:
- методи порівняння;
- методи усереднення (засновані на визначенні дисперсії Аллана, приклад - вимірювачі частоти Tektronix FCA3000 і FCA3100);
- метод визначення ступеня перекриття імпульсів;
- метод підрахунку імпульсів - часова база (час вимірювання) - фіксована [7];
- ноніусний метод (уточнення методу підрахунку імпульсів).
У методах порівняння (резонансний, гетеродинний методи, а також при вимірюванні з використанням осцилографа) використовують порівняння вимірюваної частоти з еталонною частотою джерела зразкових коливань. Ці методи застосовуються в основному для градуювання генераторів різних вимірювальних приладів. Для їх реалізації необхідний зразковий генератор більш високої точності і пристрій порівняння частот. До методів, що використовують осцилограф, відносяться:
- визначення частоти методом фігур Ліссажу (використовується синусоїдальна розгортка осцилографа);
- визначення інтервалів часу (періоду, тривалості імпульсу і т.д.) з використанням каліброваної розгортки осцилографа;
- визначення частоти за допомогою яскравості міток на круговій розгортці.
Мінусом даних методів є їх аналогова природа, а також необхідність додаткової обробки отриманих результатів, що вносить додаткову похибку і збільшує час вимірювання.
Всі ці методи можуть забезпечувати мінімальну похибку і навіть теоретичну відсутність систематичної похибки. Умови настання такої події для кожного з методів свої, але в їх основі лежить кратність вимірюваної частоти і еталонної, на основі якої проводиться вимірювання. Проблема полягає в тому, що такі ситуації є унікальними, малоймовірними і не можуть розглядатися як стандартні.
Однак існує й інший підхід до вирішення задачі вимірювання частоти за обмежений проміжок часу з максимізацією точності. Ідея полягає в підборі часової бази вимірювання, кратній вимірюваному періоду, в результаті чого за час вимірювання спостерігається ціле число періодів невідомої частоти. Таким чином зводиться до мінімуму методична похибка і теоретично вона дорівнює нулю. Прикладом такого підходу є метод вимірювання частоти за допомогою раціональних наближень [8,9].
4 МЕТОД ВИМІРЮВАННЯ ЧАСТОТИ ЗА ДОПОМОГОЮ РАЦІОНАЛЬНИХ НАБЛИЖЕНЬ
Для більшості практичних завдань точна оцінка частоти за короткий період може бути досягнута за допомогою спеціальної математичної обробки інформації. Зокрема, такий підхід характерний для методу, що розглядається (див. рис. 4, 5).
Невідома частота вимірюється шляхом порівняння її зі стандартною частотою. На вхід системи подаються два синусоїдальних сигнала з еталонною (або стандартною) і невідомою (або досліджуваною) частотою. Виявляються переходи через нуль обох частот, створюючи дві регулярні незалежні послідовності вузьких імпульсів. Невідома й еталонна послідовності отриманих імпульсів порівнюються за збігом. Це порівняння проводиться з використанням логічного елемента І. Генерується послідовність імпульсів збігів. Імпульси збігу можуть бути використані в якості ознаки, за яким визначаються моменти запуску і зупинки пари цифрових лічильників.
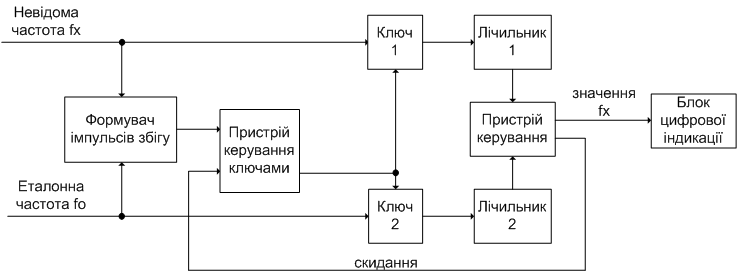
Рисунок 4 – Структурна схема вимірювача частоти на основі методу раціональних наближень
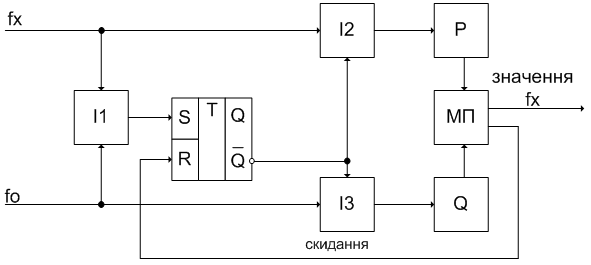
Рисунок 5 – Функціональна схема вимірювача частоти на основі методу раціональних наближень
Еталонна і досліджувана послідовності імпульсів надходять на лічильники і вимір невідомої частоти проводиться шляхом множення відомої еталонної частоти на відношення кількості імпульсів досліджуваної послідовності до кількості імпульсів стандартної послідовності, отриманих з двох цифрових лічильників [8].
На вхід вимірювача частоти надходить імпульсна послідовність з невідомою частотою fx. Маємо джерело еталонного сигналу з частотою f0, причому воно може бути як вбудованим, так і зовнішнім. Рекомендується використання високочастотного джерела атомного стандарту частоти (похибка 10^-9-10^-10). Крім того, значення еталонної частоти має бути кратно десяти. Слід зазначити, що імпульси в загальному випадку мають не ідеальні фронти (тобто є певний нахил) і нестабільне розміщення в часі (джиттер). При цьому ідентифікація переднього і заднього фронтів зазвичай відбувається після досягнення половини амплітудного значення. Проте в даному випадку для спрощення уявлення процесу функціонування методу, приймемо відсутність джиттера. Врахуємо в моделі також неідеальність фронтів.
Імпульсні послідовності невідомою та еталонної частот надходять на логічний елемент І. Після першого повного збігу починається підрахунок імпульсів. Після досягнення на лічильнику імпульсів невідомої частоти значення, рівного заданого ступеня числа десять, відбувається розрахунок невідомої частоти.
Сформуємо вимоги щодо елементів схеми:
- генератор еталонної частоти: похибка 10^-9-10^-10;
- RS-тригер: відсутність невизначеного стану, fmax=max(f0,fx);
- логічні елементи
І
: fmax=max(f0,fx); - лічильники: fmax=max(f0,fx), обрана розрядність впливає на доступні для вибору значення r. Для 16 розрядів маємо 65536 можливих станів, тобто r=1…4 (Σm(Pn)=10…10000). Для 32 розрядів маємо 4294967296 можливих станів, тобто r=1…9 (Σm(Pn)=10…1000000000).
- мікропроцесор: fmax=max(f0,fx )/10^r;
- блок цифрової індикації: особливих вимог немає.
ВИСНОВКИ
Вимірювання частоти з достатньою точністю за певний, заздалегідь обумовлений часовий інтервал - одна з фундаментальних завдань галузі телекомунікацій. Існує безліч різних методів вимірювання. Однак практичне застосування вимагає конкретних, найбільш придатних рішень для кожного з поставлених завдань.
Був проведений аналіз існуючих методів вимірювання частоти в умовах обмеження «похибка-час вимірювання» для пристрою діагностування стану каналу зв’язку на основі вимірювання частоти сигналу. В результаті розгляду концептуальної придатності даних методів для точних вимірювань для задач діагностування, зокрема, джиттера, а також їх достоїнств і обмежень, була обрана найбільш придатна інноваційна модернізація методу дискретного рахунку - метод вимірювання частоти на основі раціональних наближень. В процесі дослідження було виявлено, що похибка методів залежить не тільки від ідеї, що лежить в основі самих методів, а й від співвідношення вимірюваної та еталонної величин. Для обраного методу таке співвідношення оптимальне і воно є не випадковим, а стандартним режимом процесу вимірювання.
Також, був проведений пошук суперечливих питань (вплив джиттера імпульсів, визначення ступеня перекриття імпульсів для запуску методу і відповідної ширини імпульсів) і намічені шляхи їх вирішення з точки зору практичної реалізації методу.
Подальші дослідження будуть полягати в моделюванні процесу функціонування даного методу в MatLab та мінімізації впливу його слабких сторін на одержувані результати.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2013 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати.
ПЕРЕЛІК ПОСИЛАНЬ
- Козловский Е.А. Искусство позиционирования / Е.А. Козловский — М.: Вокруг света, 2006. - № 12 (2795). — 204-280 с.
- GPS-навигаторы для путешественников, автомобилистов, яхтсменов/ В.С. Найман — Санкт-Петербург: НТ Пресс, 2008.— 400 с.
- Бакланов И.Г. Технологии измерений в современной телекоммуникации. / И.Г.Бакланов – М.: Эко-Трендз, 1998. – 264 с.
- Скляр Б. Цифровая связь. Теоретические основы и практическое применение. Изд. 2-е, испр. :Пер. с англ. – М. : Издательский дом «Вильямс», 2003. – 1104 с.
- Аппаратура для частотных и временных измерений/ Под ред. А.П.Горшкова. Изд-во «Советское радио», 1971, 336 с.
- Ратхор Т.С. Цифровые измерения. Методы и схемотехника/ Т.С. Ратхор — М.: Техносфера, 2004. — 376 с.
- J.C. Fletcher, Frequency measurement by coincidence detection with standard frequency/ US Patent 3, 924,183, 1975.
- Daniel Hernаndez Balbuena, Oleg Sergiyenko, Vera Tyrsa, Larysa Burtseva, Moisеs Rivas Lоpez, Signal frequency measurement by rational approximations, Measurement, vol. 42, no. 1, Elsevier, 2009, pp. 136–144.
- Полапа А.А. Анализ и обоснование методов измерения частоты колебаний в условиях ограничения «время – погрешность измерений» / А.А. Полапа // Мат. 9-й Междунар. молодежной научно-технической конф. «Современные проблемы радиотехники и телекоммуникаций» (РТ-2013). — Севастополь: Изд-во СевНТУ, 2013. — С. 158 — 159.