
Реферат за темою випускної роботи
Зміст
- Вступ
- Акктуальність теми
- Об’єкти дослідження та ЗД
- Мета та задачi роботи
- Метод дослідження
- Наукова новизна та результати, що очікуються
- Практична цінність отриманих результатів
- Апробація роботи
- Структура магістерської роботи
- 1. Автоматизовані системі діагностики ТЕЗ
- 1.1 АСД на базі внутришньохемного тестування
- 1.2 АСД на базі функціонального тестування
- 1.2.1 Приборно-орієнтовані АСД
- 1.2.2 DSP-орієнтовані АСД
- 2. Аналіз умов виявлення несправностей і обгрунтування способів аналізу ТР
- 2.1 Представлення, класифікація і властивості об'єкту ЗД
- 2.2 Моделі і механізми прояву несправностей об'єкту ЗД
- 2.3 Умови виявлення несправної компоненти об'єкту ЗД и обоснование выбора способов анализа ТР
- 3. Архітектура системи ЗД
- Перелік посилань
Вступ
Актуальність теми
Як відомо, однією з основних проблем радіоелектронної (РЕА) і електронно-обчислювальної апаратури (ЕОА) є технічна діагностика або пошук несправних компонент. Для сучасних пристроїв РЕА і ЕОА, побудованих на великих (ВІС) і надвеликих інтегральних схемах (НВІС) ця проблема вирішується на базі використання технології «Граничного сканування» або по англ. «Boundary Scan». Ця технологія є найбільш досконалою, а для тих об'єктів діагностики (ОД), які виконані на БІС і НВІС з типами корпусів BGA, технологія «граничного сканування» є безальтернативною, тому що корпус BGA не передбачає можливості фізичного доступу до контактів.
Технологія «граничного сканування» сьогодні є найбільш досконалою, однак, по-перше, вона може застосовуватися тільки для ОД, побудованих на базі ВІС і НВІС, і по-друге, БІС і НВІС повинні бути містити в собі спеціальні вбудовані засоби, орієнтовані на цю технологію.
На жаль, ринок РЕА і ЕОА країн СНД і, зокрема, України, сьогодні як і раніше рясніє традиційною технікою, випущеної ще в радянський час і природно без урахування вимог технології «граничного сканування». Як показала практика, пошук несправностей для таких пристроїв ефективно вирішується за методологією «зондової діагностики (ЗД)». Тому тема даної магістерської роботи, спрямована на оптимізацію способів знімання тестових реакцій (ТР) об'єктів ЗД, є актуальною.
Об'єкти дослідження та ЗД
Об'єктом дослідження даної роботи є алгоритми вибору способів знімання ТР у процесі ЗД за структурою ОД. В якості об'єкта ЗД виступають цифрові типові елементи заміни (ТЕЗ) РЕА і ЕОА.
Мета та задачi роботи
Метою роботи є розробка алгоритмів визначення способів знімання ТР зондового пошуку несправностей для цифрових схем, з урахуванням технологічних особливостей реальних схем. Для реалізації поставленої мети в роботі розв'язуються наступні задачі:
- Огляд та дослідження автоматизовані системи діагностики ТЕЗ.
- Аналіз умов виявлення несправностей і обгрунтування способів аналізу ТР ТЕЗ.
- Розробка алгоритмів вибору способів аналізу ТР з урахуванням технологічних особливостей ТЕЗ.
- Розробка експериментального програмного забезпечення вибору способів аналізу ТР ТЕЗ та аналіз отриманих результатів.
Метод исследования
При дослідженні використано такі методи: аналіз літературних джерел, розробка програмного забезпечення для перевірки працездатності розроблених алгоритмів, теорія матриць, теорія графів, експериментальне дослідження для оцінки ефективності виконаної оптимізації.
Наукова новизна та результати, що очікуються
У роботі буде запропоновано алгоритми вибору способів аналізу ТР з урахуванням технологічних особливостей ТЕЗ.
Практична цінність отриманих результатів
На основі запропонованих алгоритмів можуть розроблятися реальні системи зондового діагностування.
Апробація роботи
Підходи до реалізації та результати роботи планується доповідати на Всеукраїнській науково-технічній конференції студентів, аспірантів та молодих студентів, аспірантів та молодих науковців «Інформатика та комп’ютерні технології (ІКТ - 2013)», що буде проходити в м. Донецьку у 2013 року.
Структура магістерської роботи
Дана робота складається зі вступу, чотирьох розділів, висновків, переліку посилань.
1. Автоматизовані системи діагностики ТЕЗ
Залежно від ступеня автоматизації рішення задачі другого типа системи діагностування ОП підрозділяються на два основні класи:
- системи з автоматичним пошуком несправностей;
- системи із зондовим пошуком несправностей.
Автоматичні системи пошук несправностей здійснюють за допомогою ідентифікації несправного стану ОД через його зовнішні (краєві) виводи і зіставлення цього стану з побудованим наперед так званим діагностичним словником несправностей. Діагностичний словник кожному несправному стану ОД ставить у відповідність тестову реакцію, яка отримується шляхом моделювання цього стану на заданому тесті ОД.
Виключаючи втручання людини, автоматичні системи покликані повністю автоматизувати процес пошуку несправностей. Проте ця ідеальна мета виявилася у принципі нездійсненною. Принципова неможливість автоматичного пошуку несправності ОП пояснюється тим, що, як показали дослідження, визначення джерела несправності цифрового пристрою з точністю до окремої знімної компоненти є завданням нерозв'язної (NP-) складності [2]. Звідси слідує низька діагнозоспроможність автоматичних систем, оскільки кожної можливої тестової реакції діагностичний словник ставить у відповідність, як правило, не одну, а цілий список несправностей ОП.
Практично нездійсненною виявилася також і сама ідея використання словника несправностей, оскільки, по-перше, модель константних несправностей, щодо якої визначається словник, ставши у пригоді для вентильних схем, є неадекватною для сучасних складних ОП. По-друге, довжина тесту сучасного ОП досягає мільйона векторів і більш, що ставить під сумнів можливість моделювання несправностей на такому тесті. Тому автоматичні системи діагностики знаходять застосування для комбінаційних і простих послідовних ОП.
Неспроможність автоматичних систем привела до необхідності побудови автоматизованих систем пошуку несправностей, які допускають втручання в діагностичний процес людини. Втручання людини, передбачене в таких системах, зводиться до активної або пасивної дії (зондуванню) на внутрішні контрольні точки ОД, тому системи називаються зондовими, а процес пошуку несправності з використанням такої системи - зондовим пошуком або зондовою діагностикою (ЗД).
У цей час на світовому ринку й ринку СНД пропонуються автоматизовані системи діагностики (АСД), які можна підрозділити на 2 великих класи:
- системи внутришньосхемного тестування;
- системи функціонального тестування.
1.1 АСД на базі внутришньохемного тестування
Термін внутришньохемне тестування (ICT- In-Circuit Testing) означає перевірку окремих компонентів на платі. Причому при тестуванні компонента виключається вплив паралельних ланцюгів. Наприклад, при перевірці резистора виміряється саме його опір, а не опір ланцюга, до якої він підключений.
У загальному виді концепція внутришньохемного тестера передбачає використання контрольно-вимірювальної апаратури (КВА) і контактуючого пристрою для фізичного доступу до контрольних точок ОД. Контакт (паралельний електричний) з усіма точками в традиційному внутришньохемному тестері здійснює матриця підпружинених контактуючих штифтів, або контактрон типу «ложе из гвоздей» (див. рис. 1.1).
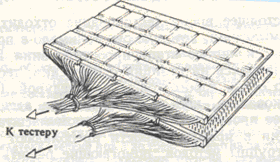
Рисунок 1.1 - Контактрон «ложе из гвоздей»
У багатьох сучасних моделях тестерів замість контактрона використовуються роботизовані (керовані) зонди, які послідовно зондують контрольні точки, а також ручні одноконтактні зонди (щупи, кліпси) і/або багатоконтактні зонди (затискачі).
Внутришньосхемний контроль охоплює різні методи, що виявляють електричні дефекти й визначають їхнє місце розташування.
Аналоговий внутришньосхемний контроль дозволяє вимірювати опір, ємність або індуктивність у приладах, визначати коротке замикання між вузловими точками схеми, перевіряти орієнтацію й функціонування діодів і транзисторів.
Цифрові методи внутришньохемного контролю забезпечують примусову установку рівня сигналу на входах приладів для перевірки правильності ї їхньої роботи по відгуку. При цифровому внутришньохемному тестуванні перевіряються цифрові мікросхеми на відповідність таблиці істинності.
Для виключення впливу паралельно встановлених мікросхем (наприклад, при використанні шинної технології) на вхід мікросхеми, що тестується, подаються імпульси великого струму з обмеженою тривалістю. Такий метод називається backdriving.
Додаткові програмні й апаратні засоби допомагають цифровому контролю провести периферійне сканування. Крім того, процес внутришньохемного контролю включає тестування заживлених ТЕЗ з аналоговими й змішаними сигналами, а також так званий безвекторний тест, що використовує аналогові характеристики приладу для електричної перевірки паяних з'єднань на складних ІС.
Вибір обладнання й методу доступу до ОД для внутришньохемного тестування залежить від вимог і можливостей користувача.
Метод кліпс і пробників універсальний і недорогий, але вимагає великих часових витрат і порівняно високу кваліфікацію персоналу, тому його звичайно застосовують при одиничному виробництві й ремонті.
Метод "поле контактів" припускає виготовлення тестового адаптера для кожного виробу. Контактування здійснюється через перехідні отвори в платі, виводи штирьових компонентів або спеціально підготовлені тестові площадки. Такий метод забезпечує дуже високу продуктивність. Через високу вартість контактрона й великий час його настроювання його застосовують при середньо- і велико-серійному виробництві.
Метод рухливих пробників є безадаптерною альтернативою доступу до виробу, що тестується. Обладнання з рухливими пробниками має декілька тестових головок із приводами по осях X, Y і Z. Тестові головки (звичайно чотири або вісім) переміщаються над випробовуваною платою з великою швидкістю. У цей час електричні зонди, розташовані на кожній головці, вступають у контакт з перехідними отворами й виводами кожного пристрою, розташованого на платі.
Таким чином, забезпечується послідовний доступ до контрольних точок. Ключовими особливостями таких тестерів є механічна точність і повторюваність, що особливо важливо для плат з щільним розміщенням компонентів, малим кроком між виводами й малою шириною доріжок.
Час підготовки виробництва сильно скорочується при розробці програми переміщення пробників методом трансляції із САПР. При цьому необхідність виготовлення тестових адаптерів відсутня. Разом з тим даний метод не забезпечує високої продуктивності при тестуванні.
Метод рухливих пробників є ідеальним для підприємств із невеликою програмою випуску, але широкою номенклатурою виробів. Крім того, таке обладнання використовується при виготовленні дослідних зразків при необхідності розширення виробництва, коли потрібно оцінити якість настроювань виробничої лінії без витрат і втрати робочого часу, пов'язаних з розробкою й виготовленням адаптерів "поле контактів".
Застосування внутришньохемного тестування дозволяє вирішувати наступні завдання:
- тестування електронних виробів і локалізація несправностей з точністю до компоненти;
- скорочення часу усунення несправностей;
- моніторинг технологічного процесу складання електронних модулів;
- нагромадження й обробку статистики результатів тестування.
У зв’язку з тим, що внутришньосхемний контроль забезпечує діагностування на рівні компоненти, це помітно знижує вартість ремонту - досить замінити дефектну деталь. Інша важлива властивість внутришньосхемного контролю - автоматична генерація тестових даних для компонентів.
До недоліків внутришньохемного контролю можна віднести наступне:
- складність доступу до контактів компонентів, особливо для ІМС із поверхневим монтажем;
- висока вартість АСД і контактрона;
- необхідність придбання й настроювання контактрона для кожного типу плат;
- велике навантаження, внесене тестером, що обумовлено одночасним контактуванням з усіма виводами ТЕЗ.
Час, необхідний для розробки тесту типового ТЕЗ з 1000 контрольними точками для АСД із «літаючими пробниками», становить від чотирьох до шести годин. Процес налагодження програмного забезпечення, необхідного для одержання найкращого тестового покриття, для того ж ТЕЗ може зайняти 6-8 год. Для порівняння, розробка програми й контактрона для звичайного тестера може зажадати 160 год., а налагодження - від 16 до 40 год..
1.2 АСД на базі функціонального тестування
Будучи завершальним кроком виробничого процесу, функціональне тестування слугує для приймання або відбраковування готових електронних блоків перед їхнім відправленням замовнику. Тестери для функціонального тестування звичайно підключаються до виробів, що тестуються, через крайове рознімання або контрольні точки (вбудовані засоби тестування). Далі симулюються електричні умови, у яких виріб буде перебувати при кінцевому використанні.
Тестове обладнання, що застосовується при функціональному тестуванні повинне виконувати наступні завдання:
- подача живлячої напруги з можливістю зміни його в автоматичному режимі (від мінімально до максимально припустимого для даного виробу);
- подача цифрових і аналогових вхідних сигналів у широкому діапазоні частот і напруг;
- вимір параметрів вихідних сигналів;
- емуляція навантажень;
- емуляція перешкод;
- обмін даними з пристроєм, що тестується;
- обробка результатів вимірів і вивід їх на дисплей або принтер у зручному для користувача вигляді;
- накопичення й обробка статистичної інформації.
Звичайно при функціональному тестуванні перевіряється тільки загальна функціональна придатність плати. Більш складні методи включають циклічну роботу виробу у всьому діапазоні експлуатаційних випробувань. Однак, час і ресурси, що необхідні для проведення такого тестування, обмежує їхнє використання областями військової й космічної промисловості.
АСД на базі функціонального тестування можна розділити на:
- приборно-орієнтовані системи (ПОС);
- DSP-орієнтовані системи.
1.2.1 Приборно-орієнтовані АСД
Приборно-орієнтовані АСД ґрунтуються на використанні різноманітних контрольно-вимірювальних і стимулюючих приладів, які керуються від комп'ютера завдяки наявності в останніх спеціальних приладових інтерфейсів і використанню спеціалізованих САПР, таких як LabView. Вони мають модульну архітектуру, що може змінюватися залежно від вимог замовника.
Для проведення різних тестів у приборно-орієнтованих АСД, як правило, використовується архітектура відкритих систем, таких як PXI або PCI. Основу таких систем становить спеціалізоване шасі, у яке можуть установлюватися тестові модулі форматів PXI, ISA або PCI:
- фіксовані й програмовані джерела живлення;
- цифрові мультиметри;
- емулятори ROM;
- цифрові осцилографи;
- швидкодіючі цифрові модулі динамічного уведення/виведення;
- високошвидкісні імпульсні, частотні, функціональні й довільні генератори;
- багатоканальні перетворювачі ЦАП і АЦП;
- мультиплексори;
- інтерфейси RS-232, GPIB, VXI.
Програмне забезпечення, що поставляється із системою, наприклад ATEasy і LabView, дозволяє об'єднати всі встановлені модулі в єдиний тестово-вимірювальний комплекс і розробляти прикладні тестові програми.
1.2.2 DSP-орієнтовані АСД
АСД даного типу замість використання реальних аналогових вимірювальних інструментів виконують їхню емуляцію на основі методів цифрової обробки сигналів (DSP – Digital Signal Processing), що звичайно виконується на базі швидкого перетворення Фур'є (ШПФ) і дискретного перетворення Фур'є (ДПФ).
DSP здатне емулювати широкий набір вимірювальних інструментів. Інструментами тепер є підпрограми, які обробляють вектори чисельних значень. Вектор може являти собою набір вибірок сигналу, частотний спектр і т.д.. Фахівець із тестування створює набір векторів у вигляді тестових сигналів.
Синтезатор сигналів подає ці вектора на ЦАП, вихід якого з'єднаний з фільтром, що відновлює, для одержання безперервного сигналу з обмеженою смугою пропускання. Отриманий сигнал подається на випробовуваний пристрій, з якого знімаються реакції. Дискретизатор аналогових сигналів виконує оцифровку знятих реакцій з використанням високошвидкісного АЦП і зберігає вибірки в ОЗП.
2. Аналіз умов виявлення несправностей і обгрунтування способів аналізу ТР
a name=p101>
2.1 Представлення, класифікація і властивості об'єкту ЗД
Як об'єкт ЗД в даній роботі розглядається ОП, виконаний як типовий елемент заміни (ТЕЗ) і що складається з цифрових мікросхем, які сполучені між собою за допомогою печатних або навісних провідників (ліній зв'язку - ЛС). Мікросхеми називаються компонентами, контакти вхідного роз'єму - вхідними псевдокомпонентами, контакти вихідного роз'єму - вихідними псевдокомпонентами, контакти двонаправленого роз'єму – двонаправленими псевдокомпонентами. У тих випадках, коли не потрібно підкреслювати відмінність компонентів від псевдокомпонентів, і ті та інші називаються просто компонентами. Компоненти схеми крім стандартних виходів можуть мати виходи з відкритим колектором і третім станом, які можуть використовуватися для формування шинних структур або монтажної логіки. Також компоненти можуть мати двонаправлені виводи, які використовуються для передачі сигналів в двох напрямах і управляються сигналами на спеціальних входах.
Множина усіх компонент ОД позначається як K={ki}, i=1,2,...,n; де К складається із об’єднання трьох множин: множини вхідних псевдокомпонент KI, множини вихідних множини KO, и множини компонент–мікросхем KC, тобто K=KI+KO+KC. Двунаправлені псеводокомпоненти належать одночасно множинам KI та KO, тобто KIO=KI*KO.
Множина входів і виходів компоненти ki позначається як X(ki)={xij}, j=1,2,...,m1i, і Y(ki)={yij}, j=1,2,...,m2i, відповідно. Двунаправлені виводи компоненти ki належать множинам X(ki) і Y(ki) одночасно і вважаються як входами так і виходами, тобто W (ki)=X(ki)*Y(ki), де W(ki)={wij}, j=1,2,...,m3i. множина функцій, які реалізує компонента Ki, позначається як Fi={Fij}, де Fij – функція, яку реалізує компонента на виході yij. Вважається, що функції компоненти залежать від усіх елементів її вхідної множини.
Множина виходів компонент, які сполучені з входом x якої-небудь компоненти через лінії зв'язку і є для нього джерелами сигналу, називається множиною джерел входу x і позначається як ГS(x). Множина входів компонент, які сполучені з виходом у якої-небудь компоненти через лінії зв'язку і є для нього приймачами сигналу, називається множиною приймачів виходу у і позначається як ГR(y). Компонент, якому належить вивод v, позначається як P(v). Множина компонент, кожній з яких належить хоч би один вивод з множини В, позначається як P(B).
Очевидно, що вхідні (вихідні) псевдокомпоненти не мають входів (виходів), складаються з одного входу (виходу), а їх функції не визначені. Двонаправлені псевдокомпоненти мають один вхід і один вихід.
Множина тестових послідовностей, що генеруються на входах і виходах компоненти ki під впливом тесту Т, позначаються як {Xil(t)} і {Yip(t)}, де Xil(t) і Yip(t) - послідовності, що генеруються на l-м вході та p-м виході компоненти відповідно; t - дискретний параметр часу, що асоціюється з номером вектора тесту Т. Відповідні еталонні послідовності позначаються як Xeil(t) та Yeip(t).
Шляхом Пнlк називається сукупність компонент Kн, Kl, Kк і ЛС між ними таких, що вихід компоненти Kн, званої початком шляху, сполучений з входом компоненти Kl, а вихід Kl - з входом компоненти Kк, званої кінцем шляху. Число компонент, утворюючих шлях, називається довжиною шляху. Множину всіляких шляхів ОД з початковою компонентой Kн та кінцевою компонентой Kк позначається як Пкн. Також використовуються поняття, що компоненти Kp та Kr:
- зв'язані, якщо множини Пpr або Пrp не є порожніми;
- зв'язані безпосередньо (сполучені ЛС), якщо довжина хоч би одного шляху з множин Пpr або Пrp рівна 2;
- зв'язані апосредственно (через інші компоненти), якщо довжина всіх шляхів з множин Пpr і Пrp більше 2.
Шлях Пнlk називається контуром (кільцем), якщо співпадають його початковий і кінцевий компоненти, тобто якщо н=к; інакше шлях називається дугою.
Введені визначення дозволяють класифікувати об'єкт ЗД таким чином:
- комбінаційна схема (КС);
- слабопослідовна або псевдокомбінаційна схема (ПКС);
- сильнопослідовна схема (СПС).
Очевидно, що деяка компонента може бути комбінаційною або послідовною, залежно від того містить вона чи ні елементи пам'яті. Тоді під ОД типу КС маються на увазі ОП, що складається тільки з комбінаційних елементів, які не утворюють між собою контурів (глобальних зворотних зв'язків). ОД типу ПКС теж не містить контурів, проте на відміну від КС може містити локальні (усередині елементів) зворотні зв'язки, тобто ОП включає як комбінаційні, так і послідовні компоненти. І, нарешті, ОД типу СПС містить комбінаційні і послідовні компоненти, охоплені глобальними зворотними зв'язками.
Під зондуванням мається на увазі знімання ТР з внутрішніх КТ ОД, у якості яких використовуються виводи компонент, штирі, контрольні гнізда, контакти роз'ємів і так далі. Реакція, що знімається з деякою КТ, несе інформацію про функціонування тієї частини схеми ОД, з якою прямо або апосредовано зв'язана ця КТ.
Далі приводиться ряд визначень і спостережень, розглянуті в [5-10], у плані дослідження деяких топологічних властивостей ОД, які використані в даній роботі.
Підсхемою ОД з даною КТ G називається множина, що складається зі всіх контактів, ЛС і компонент, підключених до точки G безпосередньо або через контакти, ЛС або інші компоненти. Аналогічно визначається підсхема множини М ОД з даною КТ. Термін "підсхема" без згадки КТ використовується для позначення будь-якої частини схеми. Дві підсхеми, побудовані для двох різних КТ, можуть мати або не мати загальні компоненти; одна з них може бути частиною іншої, або вони можуть співпадати. Останнє можливо за наявності зворотних зв'язків між компонентами, тобто якщо вони утворюють контур.
З сформульованих визначень витікають наступні властивості об'єкту ЗД.
Властивість 1. Якщо в утворюваній деякою контрольною точкою підсхемі W з множини М вибрати КТ і побудувати для неї підсхему W', що належить М, то W' належатиме підсхемі W.
Властивість 2. Якщо утворювані контрольними точками підсхеми множини М перетинаються по не порожній множині М1, то будь-яка компонента множини М, підключена безпосередньо або через інші компоненти до якої-небудь компоненти з множини М1, також належить множині М1.
2.2 Моделі і механізми прояву несправностей об'єкту ЗД
Відомі алгоритми ЗД базуються на наступних моделях несправностей ОД:
- константна несправність (КН) - постійне значення потенціалу логічного "0" або "1" на виводу компоненти або краєвому виводу ОД. КН моделюють такі фізичні несправності, як обрив і коротке замикання вхідного, вихідного виводів компоненти або ЛС, підключеної компоненті;
- логічна несправність (ЛН) - довільне відхилення функції, що реалізовується компонентою, від таблиці істинності;
- несправність типу "перемичка" (НП) - з'єднання двох ЛС.
Розрізняють НП d-вигляду і b-вигляду. Передбачається, що на замкнутих ЛС за наявності несправності b-вигляду генеруються сигнали з множини {0,1}, а при d-вигляду - з множини {0,1,d}, де "0" < d < "1" - значення сигналу, що займає проміжне положення між мінімально можливим потенціалом логічної "1" і максимально можливим потенціалом логічного "0".
Всі несправності приведених типів можуть бути одиночними або кратними. Кратна несправність не завжди означає несправність декількох компонент. Так, наприклад, на декількох виводах однієї компоненти можуть мати місце декілька КН або НП.
Найчастіше алгоритми ЗД базуються на гіпотезі про одиночну несправність, що пояснюється значно вищою імовірністю її виникнення в порівнянні з кратною несправністю. При цьому, якщо в ОД все ж таки виникає кратна несправність, то вона може бути усунена багатократним застосуванням алгоритму ЗД, побудованого на основі гіпотези про одиночну несправність.
За ознакою виявлення деяка несправність може бути істотною або неістотною, причому таке ділення може носити принциповий або непринциповий характер. Несправність h називається принципово неістотною, якщо вона не може вплинути на правильність функціонування ОД. Для такої несправності не існує тесту.
Якщо несправність h може вплинути на правильність функціонування ОД, то вона називається істотною. Аналогічні визначення використовуються для конкретного тесту Т. Несправність h називається Т-істотною (Т-неістотної), якщо вона виявляється (не виявляється) тестом Т.
Як відомо, тест деякої несправності можна представити об'єднанням послідовностей трьох типів (фаз): доступ, генерація, транспортування [15]. У фазі "доступ" забезпечується зв'язок (доступ) краєвих входів ОД з первинними виводами компоненти з несправністю. У другій фазі генерується послідовність, що забезпечує прояв (активізацію) несправності на виході цієї компоненти. У третій фазі виконується просування (транспортування) невірної вихідної реакції, обумовленою несправністю, з первинних виходів компоненти на краєві виведення ОД.
Звичайно використовуються поняття, що тест Т:
- активізує несправність h, якщо для неї виконуються перші дві фази;
- виявляє або покриває несправність h, якщо для неї виконуються всі три фази.
Далі розглядаються особливості активізації і просування несправностей в ОД.
Вузлом Uij називається компоненту Ki і ЛС, які безпосередньо сполучені з j-м виходом компоненти Ki. Хай у вузлі Uij існує несправність h така, що вона активізується тестом Т. Невірна ТР на j-м виході компоненти Ki може розповсюджуватися по різних шляхах, початком якого є цей вихід. Шлях Пнik, в якому під впливом тесту Т на виходах всіх компонент Kн, Ki, Kk формується ТР, відмінна від еталонної, називається h-шляхом. Аналогічно визначається h-контур і h-дуга. Деякий h-шлях називається закритим, якщо він не містить жодної псевдокомпоненти; інакше h-шлях називається відкритим.
Розглянемо всіляку множину Пiвых шляхів з початковою несправною компонентою Кi, в кожному з яких присутня вихідна псевдокомпонента. Тоді умовою виявлення несправності h у вузлі Uij можна виразити як існування в множині Пiвых хоч би одного шляху h-типу. Ця умова називається структурною умовою виявлення несправності.
Довільний h-шлях не обов'язково повинен містити вузол, що є джерелом несправності. В цьому випадку говоритимемо, що такий шлях транслює несправність.
Поняття h-шляху відображає описані вище визначення істотності несправності. Так несправність у вузлі Uij, яка є Т-істотною, утворює відкриті h-шляхи з початковою компонентою Кi; принципово неістотна несправність такі шляхи не утворює ні для одного тесту. Це означає, що присутність неістотних (Т-неістотних) несправностей викликає циркуляцію закритих h-шляхів і не приводить, таким чином, до відхилення вихідній ТР на зовнішніх виходах ОД від еталонної.
2.3 Умови виявлення несправної компоненти об'єкту ЗД и обоснование выбора способов анализа ТР
Однією з центральних ланок алгоритмів пошуку несправностей, що багато в чому визначає інформаційне забезпечення системи ЗД, є умова, на підставі якої робиться висновок про несправність (справність) компоненти ОД. Розглянемо особливості вибору таких умов при зондовому діагностуванні.
Очевидно, що компонента Кi несправна, якщо вона неправильно реагує на вхідну дію. На формальній мові ця умова, яку ми називатимемо функціональною умовою виявлення несправності (ФУН), можна виразити так: для оголошення компоненти Ki несправної в тесті Т повинен існувати хоч би один вектор, у відповідь на який компонента Ki, що знаходиться в певному логічному стані, хоча б на одному своєму виході видає реакцію, відмінну від таблиці істинності компоненти [14].
Алгоритм на базі ФУН дозволяє в загальному випадку аналізувати несправні компоненти ОД. Проте для своєї реалізації він вимагає складної системи моделювання і великих витрат часу, пов'язаних з оперативним обчисленням ТР компонент на всьому інтервалі часу і необхідності потактного зондування. Крім того, реалізація такої умови стає проблематичною, якщо немає можливості зміряти (визначити) внутрішній стан компоненти Кi.
Для зниження витрат часу можна застосовувати умову на базі приватних перевіряючих тестів (ППТ). Позначимо через Тi ППТ компоненти Кi. Тоді умовою виявлення несправності на базі ППТ можна виразити так: компоненту Кi оголошується несправною, якщо під впливом тесту ОД на входах компоненти Кi, що знаходиться в певному логічному стані, згенерує такий вхідний вектор, що належить Ti, реакція компоненти Ki на який буде відмінної від таблиці істинності. Звідси витікає, що при зондуванні ОД реакція компоненти Ki і її порівняння з табличним значенням проводиться тільки на наборах, що належать ППТ [14].
Приведені умови виявлення несправності зв'язані з високою трудомісткістю, обумовленою складністю обчислення ТР компонент, і необхідністю урахування їх внутрішніх станів. До того ж обчислення реакцій вимагає наявність СЛМ. Тому умови ФУН і ППТ доцільно застосовувати лише для тих ОП, виникнення несправностей в яких може привести до неможливості початкової установки. Якщо ж початкова установка ОД може бути забезпечена в умовах довільної несправності, то у якості теста доцільно використовувати періодичну дію однієї і тієї ж послідовності з початковою установкою ОД на початку кожного періоду. В цьому випадку в кожній КТ ОД процеси повторюються, що дозволяє в приведених вище умовах звільнитися від змінної стану. Відповідно одержимо просту функціональну умову (ПФУН): для оголошення компоненти Ki несправної в тесті Т повинен існувати хоч би один вектор, у відповідь на який компоненту Ki хоч би на одному своєму виході видає реакцію, відмінну від таблиці істинності компоненти. Умова ППТ трансформується в умову ПППТ: компоненту Кi оголошується несправною, якщо під впливом тесту ОД на входах компоненти Кi згенерує такий вхідний вектор, що належить Ti, реакція компоненти Ki на який буде відмінної від таблиці істинності.
Оскільки процеси в КТ повторюються, то еталонні послідовності в цих точках можна не обчислювати, а зняти з еталонного ОД і записати для подальшого порівняння в пам'ять тестера. Відповідно одержимо так звану тимчасову топологічну умову виявлення несправності (ТТУН): компонента Ki оголошується несправною, якщо знайдеться такий дискретний момент часу t, до якого ТР на всіх входах і виходах компоненти співпадатиме з еталонною реакцією, а у момент часу t у відповідь на вірний вхідний вектор компоненту виставить хоч би на одному своєму виході реакцію, відмінну від еталонної.
Умова ТТУН дозволяє локалізувати несправну компоненту як в простому h-шляху, так і в h-контурі. У той же час ОД типу КС і ПКС, як відомо, не містять контурів. Тому для них умова ТТУН може бути спрощена: компонента Ki оголошується несправною, якщо при вірній вхідній реакції знайдеться такий дискретний момент часу t, на якому компонента виставить хоч би на одному своєму виході реакцію, відмінну від еталонної. Цю умову називатимемо простим топологічним (ПТУН).
У умові типу ПТУН враховується тільки факт, а не момент виникнення помилки в ТР компоненти Кi.
Топологічні умови виявлення несправності вигідно відрізняються від функціональних по швидкодії і трудомісткості алгоритмів зондування, що реалізовуються на їх основі. Проте вони вимагають великого об'єму пам'яті для зберігання ТР компонент.
Цей недолік може бути усунений, якщо для компонент простих шляхів ОД застосовується так звана сигнатурна топологічна умова (СТУН): компонента Ki оголошується несправною, якщо при вірних вхідних сигнатурах хоч би на одному виході компоненти є сигнатура, відмінна від еталонної.
Використання умови СТУН дозволяє значно скорочувати місткість пам'яті системи ЗД, необхідної для зберігання ТР. Проте її використання без погіршення діагнозоспроможності ОД можливе лише в простих ланцюгах об'єкту.
3. Архітектура системи ЗД
Обчислювальний комплекс системи ЗД, що розробляэться, представлений на рис.3.1.
Рисунок 3.1 – Обчислювальний комплекс системи ЗД
(анімація: 6 кадрів, неприривне повторення, 140кб)
Комплекс можна представити композицією трьох основних компонентів: інструментальної ЕОМ, стандартної периферії і контрольно-діагностичної апаратури (КДА).
Основу комплексу складає інструментальна ЕОМ, у якості якої передбачається ПЭВМ типу IBM PC. Стандартну периферію можуть складати принтер, плотер, використовувані для креслення принципової схеми, одержання твердої копії баз даних, протоколів іспиту об'єкта діагностики і т.д., засобу комунікації, наприклад модем - для мережного обміну інформацією з вилученою центральною станцією діагностики, у якій можуть зберігатися бази даних об'єкта діагностики, передані на сеанс діагностування в даний (периферійний) комплекс ЗД, а також інші периферійні пристрої (ПУ).
КДА утворюють спеціалізовані пристрої зондового діагностування ОД. ПЭВМ комплексу виконує "інтелектуальні" функції системи зондової діагностики: підготовку й обробку інформаційного забезпечення ОД, ведення баз даних, реалізацію алгоритмів пошуку несправності, діалог діагноста, що веде пошук, з ПЭВМ і ін..
На КДА покладаються наступні функції:
- генерація детермінованих, псевдовипадкових і комбінованих тестів ОД;
- знімання й обробка тестових реакцій, що генеруються на зовнішніх виходах ОД;
- знімання й обробка тестових реакцій із внутрішніх контрольних крапок ОД;
- керування синхронізацією ОД;
- сполучення з органами керування й індикації зонда;
- сполучення ОД з ПЭВМ.
Реалізацію зазначених функцій КДА здійснює за допомогою наступних складових її пристроїв:
- одного чи декількох (у залежності від числа висновків ОД) посад контролю (ПК);
- співпроцесора псевдовипадкових тестів (СПСТ);
- пристрою зондування (УЗ);
- компаратора тестових реакцій (КТР);
- адаптера зондової діагностики.
Структура ПО системы ЗД представлена на рис. 3.2 .
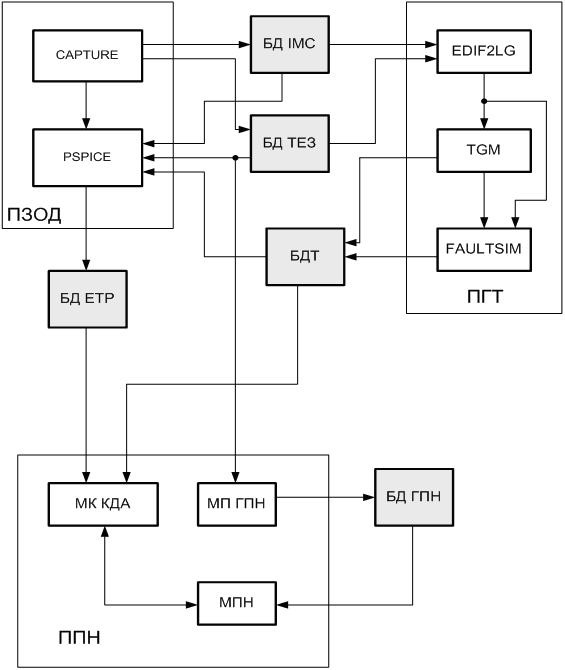
Рисунок 3.2 - Структура ПЗ системи ЗД
ПЗ складається з наступних основних підсистем: ПЗОД - підсистема завдання об'єкта діагностики (ПЗОД), підсистема генерації тестів (ПГТ) і підсистема пошуку несправностей (ППН).
ПЗОД побудована на базі САПР ORCAD і призначена для введення ОД (ТЕЗ) у вигляді електричної принципової схеми та побудови на його основі логічної PSpise-моделі, що здійснюється за допомогою схемного редактора (CAPTURE) і Pspice-симулятора САПР відповідно.
ПГТ призначена для автоматичної побудови тестів ТЕЗ по їх електричним схемами і включає модуль генерації псевдовипадкових тестів (TGM), симулятор константних несправностей (FAULTSIM) і формувач логічної, так званої, ISCAS-моделі з EDIF-формату опису ТЕЗ (EDIF2ISCAS).
ППН призначена для пошуку несправності ТЕЗ з точністю до знімної компоненти. Вона включає модуль побудови графа пошуку несправностей (МП ГПН), модуль пошуку несправностей (МПН), модуль взаємодії з КДА (МК КДА), а також підсистема введення і аналізу ТЕЗ як об'єкта ЗД.
На структурі ПЗ ЗД показані також бібліотеки інтегральних мікросхем (ІМС), БД ТЕЗ, БД еталонних тестових реакцій (БД ЕТР), побудовані за допомогою САПР ORCAD, БД тестів ТЕЗ (БДТ), побудовані за допомогою підсистеми ПГТ і БД графів пошуку несправностей ТЕЗ (БД ГПН).
Перелік посилань
- Бухтеев А. Методы и средства проектирования систем на кристалле – Режим доступа: http://www.chipinfo.ru/...
- Тоценко В.Г. Алгоритмы технического диагностирования дискретных устройств - М.: Радио и связь, 1985. - 240с.
- Гуляев В.А. Организация систем диагностирования вычислительных машин – Киев: Наукова думка, 1979. - 116 с.
- Пархоменко П.П., Согомонян Е.С. Основы технической диагностики: Оптимизация алгоритмов диагностирования, аппаратурные средства – М: Энергия, 1981. – 320 с.
- Автоматизация диагностирования электронных устройств / Ю.В. Малышко, В.П. Чипулис, С.Г. Шаршунов. – М.: Энергоатомиздат, 1986. – 216 с.
- Тестовый контроль микропроцессорных БИС на производстве / Ясинявичене Г.М., Бургис Б.В. и др., - М: Радио и связь, 1989. – 120 с.
- Крейг, Пиног. Внутрисхемные испытания с применением сигнатурного анализа // Электроника, 1979, т.52, N11, с.64-70.
- Байда Н.П., Кузьмин И.В., Шпилевой В.Т. Микропроцессорная система поэлементного диагностирования РЭА - М.: Радио и связь, 1987. - 256с.
- Самообучающиеся анализаторы производственных дефектов РЭА / Н.П. Байда, В.И. Месюра, А.М. Роик – М.: Радио и связь, 1991 – 257 с.
- Техническая диагностика элементов и узлов персональных компьютеров / В.И. Хаханов - К.: ИСИО, 1997. - 308 с.
- Львович Г.А., Хавкин В.Е. Самодиагностирование микропроцессорных систем - М.: ЦНИИ "Электроника", 1985. - 54с.
- Киселев В.В., Кон Е.Л., Шеховцов О.И. Автоматизация поиска дефектов в цифровых устройствах - Л.: Энергоатомиздат, 1986. - 96с.
- Проектирование внешних средств автоматизированного контроля РЭА / Под ред. Пономарева Н.Н. - М.: Радио и связь, 1984. - 296с.
- Львович Г.А., Самощенко А.В., Хавкин В.Е. Диагностирование микропроцессорных систем // Обзоры по электронной технике. Сер. Микроэлектроника, 1987, Вып.7-83с.
- Гробман Д.М. Локализация дефектов цифровых схем // АВТ, 1983, N2, c.79-84.
- Гробман Д.М. Автоматизация поиска дефектов логических схем // АВТ. - 1979, N1, с.33-35.
- Соколов Ю.А. Анализ технических средств зондового поиска неисправностей в дискретных устройствах - Вопросы радиоэлектроники. Сер. ЭВТ, 1978, вып.11, с.73-79.
- Соколов Ю.А. К вопросу зондового поиска неисправностей // Вопросы радиоэлектроники. Сер. ЭВТ-1979. Вып.11, с.18-23.
- Соколов Ю.А. Анализ технических средств зондового поиска неисправностей в дискретных устройствах // Вопр. радиоэлектроники. Сер. ЭВТ. 1978, вып.11, с.73-80.
- Соколов Ю.А. К вопросу поиска неисправностей // Вопр. радиоэлектроники, Сер. ЭВТ, 1980, вып.12, с.51-55.
- Молов В.К., Тарасенко В.П. Структурно-аналитический метод поиска неисправностей //Автоматика и вычислительная техника - 1984, с. 72-78.
- Сперанский Д.В., Черевко Н.В. О сокращении числа зондовых проб при диагностировании цифровых устройств // Электронное моделирование - 1992, N 3., c. 56 - 62.
- Зинченко Ю.Е., Хатейт Ю. Стратегия поиска неисправностей системы зондовой диагностики / Теоретическая и прикладная информатика. Науч.-техн. конф.. Тезисы докладов. – Донецк, 1993. – С. 59.
- Зинченко, Ю. Е., Козинец, А. М., Жилин, К. Н. Проблемы зондового поиска неисправностей и пути их разрешения // Сборник трудов Донецкого государственного технического университета. Серия: Информатика, кибернетика и вычислительная техника, выпуск 6. – Донецк: ДонГТУ, 1999. – С. 212-217.
- Воротынцев, Н.В., Зинченко, Ю.Е. Поиск неисправностей цифровых ТЭЗ по алгоритму ведомого зонда со «статической оптимизацией» // Сборник трудов первой международной студенческой научно-технической конференции – 15 декабря 2005 г. – Донецк : ДонНТУ, 2005. – С. 321-322.
- Деменко, А.Г., Ханаев, В.В., Зинченко, Ю. Е., Зинченко, Т. А. Проблемы минимизации количества перестановок зонда в процессе поиска неисправностей по методологии «ведомого зонда» // Сборник трудов III научно-технической конференции студентов, аспирантов и молодых ученых – 16-18 апреля 2012 г. – Донецк : ДонНТУ, 2012.
- Зинченко Ю. Е. – Научные интересы и разработки [Электронный ресурс]. – Режим доступа: http://hardclub.donntu.ru/...
- А.с. N883918 G06F 15/46. Устройство для контроля неисправностей цифровых узлов (С.С.Ширяев и др.) Локализация неисправностей ИС в кольце МС.
- Тестово-диагностический комплекс – Автоматизированная система диагностики ТЕСТ-Д для ремонта электронных промышленных устройств [Электронный ресурс]. – Режим доступа: http://mages.chat.ru/...
- Корченко А.А., Зинченко Ю.Е.. Оптимизация адаптивного подхода генерации псевдослучайных тестов // Наукові праці ДонНТУ. Серія «Проблеми моделювання та автоматизації проектування» (МАП-2012). Випуск 10. – Донецьк: ДонНТУ. – 2012. – с 60-78.
- Корченко А.А., Зинченко Ю.Е. Распределенные вычисления в системе генерации псевдослучайных адаптивных тестов // «Информатика и компьютерные технологии», сборник трудов VIII международной научно-технической конференции студентов, аспирантов и молодых ученых – 18-19 сентября 2012 г., Донецк, ДонНТУ. – 2012. В 2-х томах, Т. 1. – С. 96-98.
- Зинченко Ю., Калашников В., Хайдук С. И др.. FPGA-технологии проектирования и диагностика компьютерных систем / Сборник научных трудов VI Междунар. научн.-практ. конф. «Современные информационные технологии и ИТ-образование». - Москва: МГУ, 2011. - Т. 1. 787 С. 422-429, - электрон. опт. диск (CD ROM). ISBN 978-5-9556-0128-1 Режим доступа: http://conf.it-edu.ru/...
- Зинченко Ю.Е., Корченко А.А.. Адаптивный подход к генерации псевдослучайных тестов цифровых устройств // Наукові праці Донецького національного технічного університету. Серія «Проблеми моделювання та автоматизації проектування» (МАП-2011). Випуск 9 (179): – Донецьк: ДонНТУ. – 2011. – С. 360-365.