Аннотация
Толочко О.И., Палис Ф., Бажутин Д.В. - Гашение горизонтальных упругих колебаний конструкции мостового крана. Выполнен анализ горизонтальных поперечных колебаний моста при его перемещении с неподвижной тележкой, закрепленной посередине моста, с помощью пакета Comsol Multiphysics. Разработана линейная математическая модель исследуемого объекта в виде двухмассовой механической системы. Синтезирован модальный регулятор, позволяющий гасить упругие колебания как в линейной модели, так и в модели с распределенными параметрами.
Актуальность работы.
При исследовании крановых механизмов обычно уделяют внимание колебаниям груза и их гашению. Однако в процессе перемещения моста и тележки упругим деформациям подвергается мост, что приводит к сокращению срока его службы.
Целью данной работы является исследование и разработка методов гашения горизонтальных колебаний моста при его перемещении.
Материал и результаты исследований.
Применение сечений специальной формы позволяет создавать механические конструкции мостовых кранов, которые при относительно небольшой массе обладают достаточно высокой жесткостью. Однако с увеличением пролета податливость конструкции к воздействию упругих колебаний увеличивается.
Особенностью таких объектов является то, что их масса и упругость равномерно распределены по длине конструкции, в результате чего процесс их упругой деформации описывается дифференциальными уравнениями в частных производных (ДУЧП). Для их математического моделирования удобно использовать специализированное программное обеспечение, предназначенное для решения задач механики деформируемого твердого тела, в частности, пакет Comsol Multiphysics, также известный как Femlab [1]. В среде этого пакета модель набирается в виде механической конструкции, а ДУЧП решаются методом конечных элементов.
Упрощенная модель конструкции моста в пакете Comsol Multiphysics приведена на рис.1. Параметрами этой модели являются геометрические размеры и массы моста и тележки, а также модуль упругости материала, из которого изготовлен мост.
Данная модель выполнена в виде сплошных металлических балок, так как создание тонкостенных моделей усложняет модель и увеличивает требуемый объем оперативной памяти, а также время расчета переходных процессов.
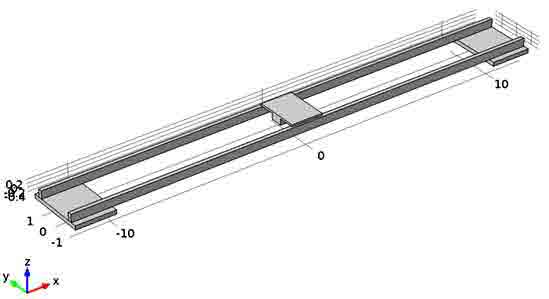
Рисунок 1 – Модель конструкции мостового крана
Поэтому с целью максимального упрощения модели мост представляем в виде двух цельнометаллических профилей с прямоугольным сечением и заниженными значениями плотности и модуля упругости материала так, чтобы масса конструкции и ее жесткость примерно соответствовала реальным данным. Тележка фиксируется в одном положении и моделируется как составная часть конструкции моста.
Расположим тележку посредине моста и приложим к крайним граням данной конструкции усилие, соответствующее разгону моста до скорости 0.5 м/с за 1 с при отработке трапецеидального закона изменения скорости.
Графики изменения скорости крайних точек моста v1 и тележки v2, а также максимальной деформации моста в поперечном направлении Δs2 , которая имеет место в его средней точке, приведены на рис.2. Из них видно, что рассматриваемые точки конструкции совершают незатухающие колебания, которые постепенно уменьшают ее прочность. На основании анализа частотного спектра сигнала скорости в пакете Comsol установлено, что наиболее ярко выраженными являются колебания конструкции с частотой ƒ=1.18 Гц.
Для подавления этих колебаний необходимо синтезировать соответствующую систему управления.
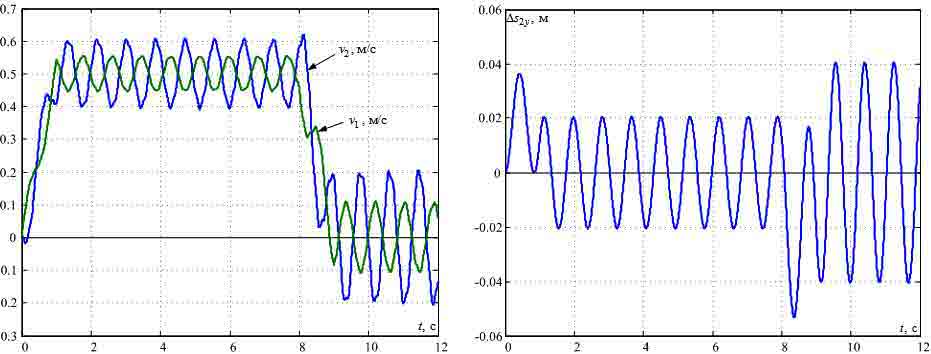
Рисунок 2 – Переходные процессы движения упругой конструкции мостового кранаскоростью моста, что требует наличия линейной математической модели объекта регулирования
В данном случае математическую модель объекта можно составить на основании кинематических схем многомассовых систем, приведенных на рис. 3
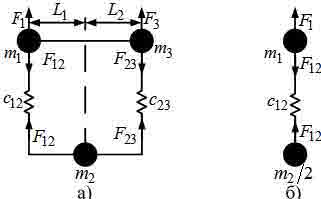
Рисунок 3 – Кинематические модели моста
На рис.3 а) мост условно представлен в виде трех сосредоточенных масс – крайних точек m1 и m3, связанными упругими связями с коэффициентами жесткости c12 и c23 с точкой m2 в которой находится тележка.
Если тележка расположена посередине моста (L1=L2), то и коэффициенты жесткости упругих связей также должны быть одинаковыми. Если при этом равны между собой и массы, сосредоточенные на концах моста, а также приложенные к ним силы, то кинематическую схему моста можно упростить до двухмассовой, оставив одну опору и центральную точку, массу которой следует уменьшить в 2 раза. Кинематическая схема для такого случая представлена на рис.3 б). Ее математическое описание имеет вид:
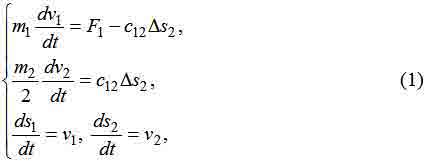
где F1 сила, приложенная к первой массе, F12 - упругая сила, Δs2=s1-s2 - величина упругой деформации.
При известных значениях сосредоточенных масс и постоянной времени упругих колебаний двухмассовой системы T12=1/2πƒ можно рассчитать коэффициент жесткости:

Таким образом, одним из главных вопросов при моделировании в данном случае является выбор величин сосредоточенных масс.
В результате исследований линейной модели обнаружено, что при изменении распределения массы моста между опорами и местом расположения те-лежки желаемая частота упругих колебаний дости-гается при разных амплитудах сигналов v1 и v2 Наилучшее совпадение этих амплитуд с результатами, полученными в Comsol, обеспечивается при расчете сосредоточенных масс по формулам:

где mc1,3 – сосредоточенные массы первой и второй опор соответственно, которые включают в себя массу колес, электроприводов и концевых балок, mvp - распределенная масса главных балок моста, mvcT – сосредоточенная масса тележки. Такое распределение масс совпадает с рекомендациями, приведенными в [2], хотя в некоторых источниках предлагается массу моста распределять равномерно между опорами, без средней точки [3].
Результаты моделирования линейной двухмассовой системы с рекомендуемыми параметрами приведены на рис.4, из которого видно, что полученная модель достаточно точно воспроизводит процесс перемещения конструкции, полученный в пакете Comsol Mutiphysics. На основании данной модели уже возможно синтезировать регулятор для гашения колебаний.
Одним из способов гашения упругих колебаний является применение регулятора с линейной обратной связью по полному вектору состояний системы.
Контур тока представляем в виде апериодического звена с постоянной времени TT=0.01 с. Влиянием перекрестных связей для приводов переменного тока и внутренней обратной связи по ЭДС вращения двигателя пренебрегаем.
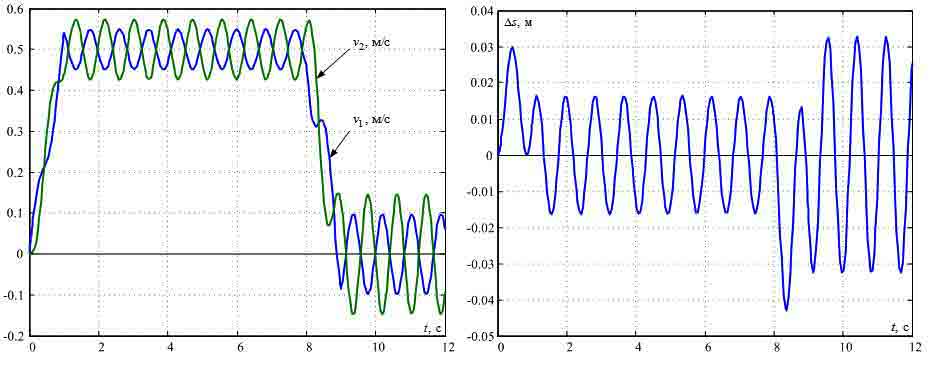
Рисунок 4 – Переходные процессы в линеаризованной системе.
Для данной системы вектор состояния имеет следующий вид:

Коэффициенты модального регулятора K рассчитываем по коэффициентам ai желаемого характеристического полинома, которые определяют динамику замкнутой системы. В результате синтеза получены следующие выражения:
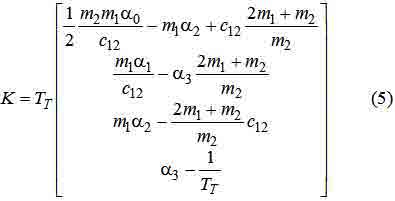
Результаты моделирования системы с таким регулятором при использовании распределения Бесселя со среднегеометрическим корнем Ω0=1/(8TT ) , приведены на рис.5. Видим, что колебания в системе отсутствуют, а максимальное значение отклонения средней точки моста уменьшилось по сравнению с результатами, представленными на рис.4, более чем в 2 раза. Следует учитывать, что линейная модель является приближенной, а потому необходимо проверять адекватность полученных результатов на модели с распределенными параметрами.
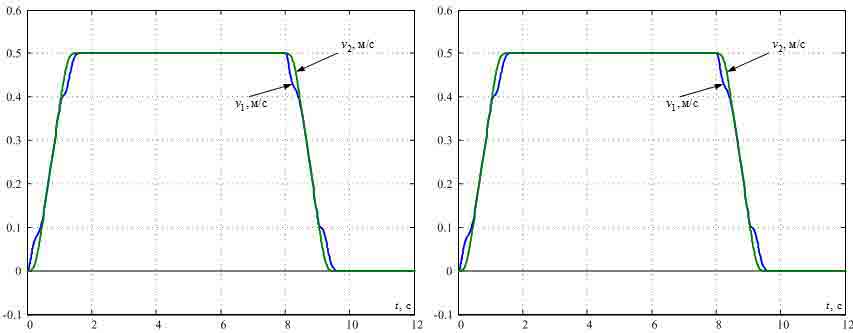
Рисунок 5 – Переходные процессы в линейной модели с регулятором состояния
Для этого приложим к модели моста в Comsol линейную силу, полученную в системе с модальным регулятором на выходе контура тока. Результаты моделирования представлены на рис.6.
Видим, что низкочастотные упругие колебания полностью гасятся. При этом остаются незначительные колебания более высокой частоты, не учтенные в линейной модели. Тем не менее, результаты моделирования исследуемого объекта с учетом распределенности массы и упругости моста по его длине с высокой степенью точности совпадают с результатами, полученными на линейной модели, что подтверждает адекватность последней.
Дальнейшие исследования, выполненные в Comsol, показали, что при фиксации тележки в других точках моста характер упругих колебаний моста существенно изменяется: появляются дополнительные частоты, изменяющиеся в широком диапазоне. Это делает невозможным применение синтезированного модального регулятора при большом диапазоне перемещений тележки. Для синтеза адаптивной системы управления можно использовать линейную модель моста на основании трехмассовой кинематической схемы рис. 3а), в которой изменение положения тележки учитывается изменением коэффициентов упругости и распределения масс.
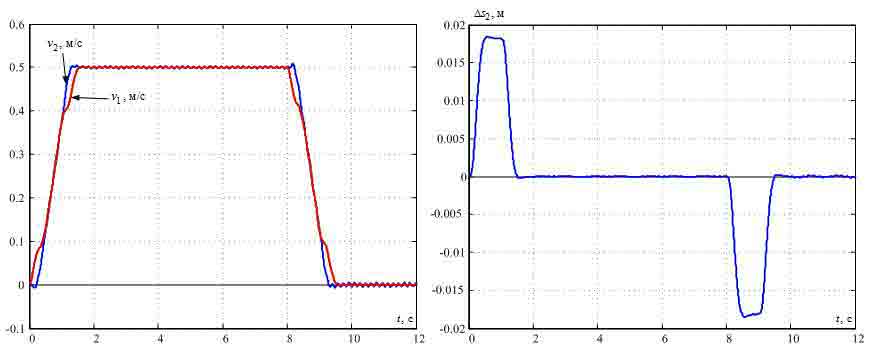
Рисунок 5 – Переходные процессы в модели с распределенными параметрами при подаче на нее выходного сигнала контура тока в системе с регулятором состояния
В этом случае перспективным представляется расчет нескольких модальных регуляторов, соответствующих различным положениям тележки, и плавный переход от одной настройки к другой при помощи нечеткого регулятора типа Сугено.
Горизонтальное перемещение моста крана с тележкой, неподвижно закрепленной в его центральной точке, можно с достаточной степенью точности описать двухмассовой системой, заменив распределенные параметры сосредоточенными в соответствии с [3]. Такая модель позволяет синтезировать регулятор состояния для эффективного гашения колебаний конструкции моста в направлении его движения. Исследования следует продолжить с учетом движения тележки с подвешенным к ней грузом. Кроме того, необходимо проанализировать характер и возможность гашения вертикальных ко-лебаний моста и тележки с грузом, возникающих при подъеме и опускании груза.
Список использованой литератури
- Comsol Multiphysics User’s Guide. Version 4.2, 2011 г.
- Будіков Л.Я. Багатопараметричний аналіз ди-наміки вантажопідйомних кранів мостового типу: Монографія. – Луганськ, вид-во СНУ ім. В.Даля, вид. 2-е, 2003. – 210 с.
- Макурин А.В., Морозов Д.И. Динамика продольного перемещения мостового крана с учетом упругости элементов конструкции // Електротехнічні та комп’ютерні системи. – 2011. – №3(79). – С. 167-169.