
Aperçu
Sommaire
- Introduction
- 1. L'actualite du sujet
- 2. Le but et les taches de l'etude
- 3. La classification des robots mobiles devant la destination fonctionnelle
- 4. Le quai experimental
- 4.1 Robot Mobile Koala K-Team
- 4.2 Web camera LogitechC310 HD
- 5. Le regime d'exposition le travail le Koala
- Les conclusions
- Bibliographie
Introduction
Dans le cadre du travail donne se planifie d'elaborer le systeme mobile, qui travaille a la base de la video information, a savoir dirige le robot mobile de roue pour que celui-la evite l'obstacle sur la voie et avancait sur la source lumineuse. Il y a un besoin du perfectionnement des algorithmes de la gestion visuelle par le mouvement du robot mobile, en utilisant les nouvelles methodes de l'accueil de l'information et sa transformation.
1. L'actualite du sujet
L'actualite du travail donne consiste pour elargir les possibilites de la conduite du robot dans le milieu inconnu, augmenter son autonomie, en utilisant les systemes de la vue artificielle.
2. Le but et les taches de l'etude
- Le modelage mathematique du systeme de l'electro mandat d'amener du courant continu du robot mobile;
- La redaction du schema de la gestion du robot mobile dans l'elargissement Simulink du produit logiciel MATLAB;
- La realisation de la connexion du camera Web LogitechC310 HD;
- La creation et le perfectionnement du systeme de gestion algorithmique le robot a la base du flux de la lumiere;
- L'etude experimentale des schemas
du circuit des obstacles
etles deplacements en direction de la lumiere
.
3. Classification des robots d'entrainement
4. Plate-forme experimentale
4.1 Robot mobile Koala K-Team
L'objet de toutes les experiences a ete robot mobile Koala. C'est un robot mobile de taille moyenne. Le robot est equipe de deux blocs de trois roues avec une vitesse maximale de 0,4 m/s, les roues ont un rayon de 45 mm et est monte sur l'axe d'une longueur de 32 cm. La masse de robot est de 3,6 kg [4].
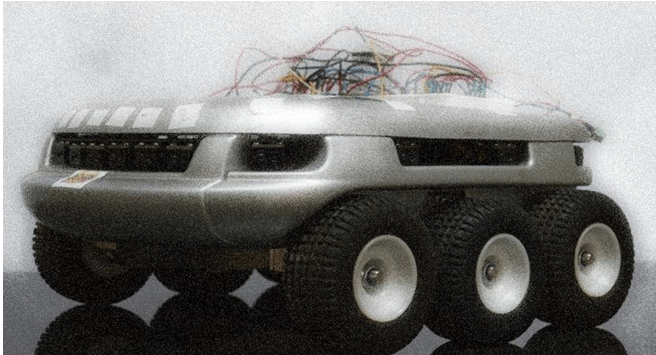
Figure 4.1 - L'apparence de robot mobile Koala
Les parametres de travail et de sa fonctionnalite, nous pouvons controler a l'aide d’une interface RS232. La communication entre l'ordinateur et le robot Koala s'effectue par l'envoi et la reception ASCIІ messages. L'interaction permet d'ajuster le travail en fonction des commandes. L'interaction de la gestion fonctionnelle des ressources de travail utilise le protocole de commandes et de reponses. Le Koala est muni d'un processeur Motorola 68331@22 Mhz. Le processeur principal de robot assure la gestion directe de l'alimentation du moteur et peut lire les impulsions du codeur. Il peut egalement afficher des informations sur le courant de chaque moteur, qui est proportionnelle a la couple de la roue.
4.2 Webcam LogitechC310 HD
Cette camera a ete utilisee pour les essais, lors de la gestion d'un robot avec l'aide le flux de la lumiere [6].

Figure 4.2 - Webcam LogitechC310 HD
LogitechC310 HD dans l'etude a ete utilisee avec les caracteristiques suivantes:
- la separation VGA 1280 X 720 pixels;
- cadence de 30 images par seconde.
Web-appareil de ce type est ideal pour la video haute definition avec une separation de 720p et le transfert de donnees de 1 Mbit/s.
5. Le regime d'exposition le travail le Koala
Le robot le Koala se comporte a la facon des automobiles de Brajtenberg. Il y a dans le robot un Koala le regime d'exposition a la base de l'algorithme de Brajtenberg. Diriger le robot on peut dans le milieu de Matlab et par ZOC Terminal [9]. Il y a Pour cela des equipes, avec l'aide de laquelle se realisent les relations avec le robot. Le regime 0, dans la base de qui est l'algorithme de Brajtenberg, travaille comme il suit apres la mise en marche le robot doit aller en avant, il n'y aura pas obstacle. Ils doivent etre vifs pour qu'il vaut mieux percevoir l'irradiation refletee par les detecteurs de l'approche.
Mais la structure du robot est plus complexe que les automobiles de Brajtenberg, a savoir, la quantite de detecteurs infrarouges de l'approche - 16.8 gauches detecteurs sont joints a un gauche moteur. 8 regles - avec droit. On peut programmer l'algorithme de Brajtenberg dans la langue Avec C++ pour le quai d'Ardouino avec le microcontroller d'Atmega 2560.
Les conclusions
A la base du travail passe se planifie:
- appliquer le paiement Arduino pour que le robot devienne entierement autonome et sans problemes visitait des obstacles;
Figure - Sauter interferences (animation: 7 effectifs, 5 cycles de la repetition, 126 kilo-octet)
- elaborer l'algorithme du mouvement du robot de maniere que celui-la puisse partir du labyrinthe au moment ou a vu la lumiere.
A l'orthographe du compte rendu donne магистерская le travail n'est pas encore termine. L'achevement definitif sera en decembre 2014. Le texte integral du travail et les documents sur le sujet peuvent etre recu chez l'auteur ou son chef apres la date indiquee.
La liste des sources
- Астапкович А.М., Анисимов А.Л., Елисеенко А.Г., Суханов И.О. Современные тенденции построения систем управления дистанционно-пилотируемыми летательными аппаратами. // В кн.: Информационно-управляющие системы для подвижных объектов. СПб: Политехника, 2002. С. 7 32.
- Основы роботехники [Ressource electronique]. – Mode d'acces: http://www.gruppa-prolif.ru/content/view/76/98/.
- Braitenberg V. Vehicles. Experiments in Synthetic Psychology / Valentino Braitenberg. – The MIT Press, Cambridge, London, 1984. – 29 p.
- Практическая робототехника [Ressource electronique]. – Mode d'acces: http://www.roboclub.ru/index/ .
- Site officiel Logitech [Ressource electronique]. – Mode d'acces: http://www.roboclub.ru/index/ .
- Site officiel Unibrain [Ressource electronique]. – Mode d'acces: http:// www.unibrain.com .
- Time To Contact [Ressource electronique]. – Mode d'acces: http://opticflow.bu.edu/research/time-to-contact-estimation .
- Мельник А.А. Мобильные роботы компании «K-Team» для решения специфических технических задач / Мельник А.А., Борисенко В.Ф., Хоменко В.Н., Плис П.С.. – Кременчук, 2010 – С. 36 – 39. – (Вісник КДПУ ім. М. Остроградського, випуск 4/2010 (63). Частина 3)
- Commande d’un robot mobile rapide aroues non directionnelles sur sol naturel. These de doctorat presentee a l’universite Рaris 6: 10.04.2008 - 198с
- Москаленко В.В. Справочник электромонтера 2005, 2-е изд., 288 стр.
- Симонович С.В. Компьютер в вашей школе. – М.: Аст-Пресс: Ин-формком-Пресс. 2001. – 16 с.