
Реферат на тему выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Общая характеристика и классификация приводов роботов
- 4. Имеющиеся наработки в визуальном управлении мобильным роботом
- 5. Экспериментальная платформа
- 5.1 Мобильный робот Коала K-Team
- 5.2 Веб-камера LogitechC310 HD
- 6. Система визуального управления роботом
- 6.1 Управление мобильным роботом Коала из среды Simulink
- 6.2 Автомобили Брайтенберга
- 7. Демонстрационный режим работа Коала
- Выводы
- Список источников
Введение
В рамках данной работы планируется разработать мобильную систему, которая работает на основе видеоинформации, а именно управляет мобильным колесным роботом чтобы тот избегал препятствия на своем пути и двигался на источник света. Существует потребность в совершенствовании алгоритмов визуального управления движением мобильного робота, используя новые методы приема информации и ее трансформации.
1. Актуальность темы
Актуальность данной работы заключается в том, чтобы расширить возможности поведения робота в неизвестной среде, повысить его автономность, используя системы искусственного зрения.
2. Цель и задачи исследования
- Математическое моделирование системы электропривода постоянного тока мобильного робота;
- Составление схемы управления мобильным роботом в расширении Simulink программного пакета MATLAB;
- Реализация подключения веб-камеры LogitechC310 HD;
- Создание и совершенствование алгоритмической системы управления роботом на основе потока света;
- Экспериментальное исследование схем «объезда препятствий» и «перемещения в направлении света».
3. Общая характеристика и классификация приводов роботов
По типу управления привода могут быть разомкнутыми с позиционированием по упорам, разомкнутыми с цифровым управлением и применением как двигателей шаговых электромоторов или составных цилиндров (позиционеров), замкнутыми или следящими с обратными связями по положению и некоторыми другими параметрами (по скорости, силе и др.). Следящие привода на базе гидравлического и электрического двигателей нашли широкое применение в роботах и являются наиболее перспективными. По способу использования, поступления и отвода энергии от механической системы различают активный и пассивный привода. В активном приводе используют активные силы, создаваемые двигателем, в пассивных - тормозных силах, отбираемые от механической системы. Преимущественное применение в роботах нашли активные приводы.
Выбор того или иного вида привода обусловлено функциональным назначением робота, предъявляемыми к нему технологическими требованиями, особенностями производства и условиями эксплуатации, а также стоимостью, сложностью обслуживания, эксплуатационными расходами, наличием тех или иных комплектующих изделий и их качеством. Выбор привода должен осуществляться совместно с определением типа и структуры системы управления [2]. Первоочередным вопросом, решаемым при проектировании или использовании робота, есть выбор того или иного типа привода по виду энергоносителя.
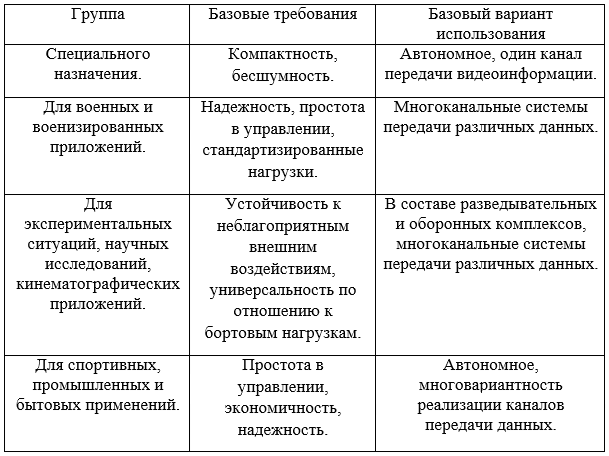
Таблица 3.1 - Классификация мобильных роботов по функциональному назначению
4. Имеющиеся наработки в визуальном управлении мобильным роботом
Кафедра ЭАПУ совместно с университетом Сержи-Понтуаз (лаборатория ЭТИС) занималась изучением вопросов визуального управления роботом (магистр Зайцев М.). В прошлом году были проведены опыты, связанные с исследованием возможностей робота избегать препятствия. Основными задачами были:
- разработка и совершенствование систем управления мобильным роботом на основе оптического потока, рассчитанного по данным бортовой камеры;
- проектирование нейронной сети, которая позволила соотнести значение оптического потока с текущей скоростью мобильного робота.
Была спроектирована и промоделирована система управления роботом в функции оптического потока. Она приведена на рисунке 4.1.
Данная модель включает в себя следующие основные блоки:
- блок получения изображения с камеры;
- блок расчета величин двух частей изображения;
- блок, который задает скорость каждого колеса;
- блок расчета оптического потока.
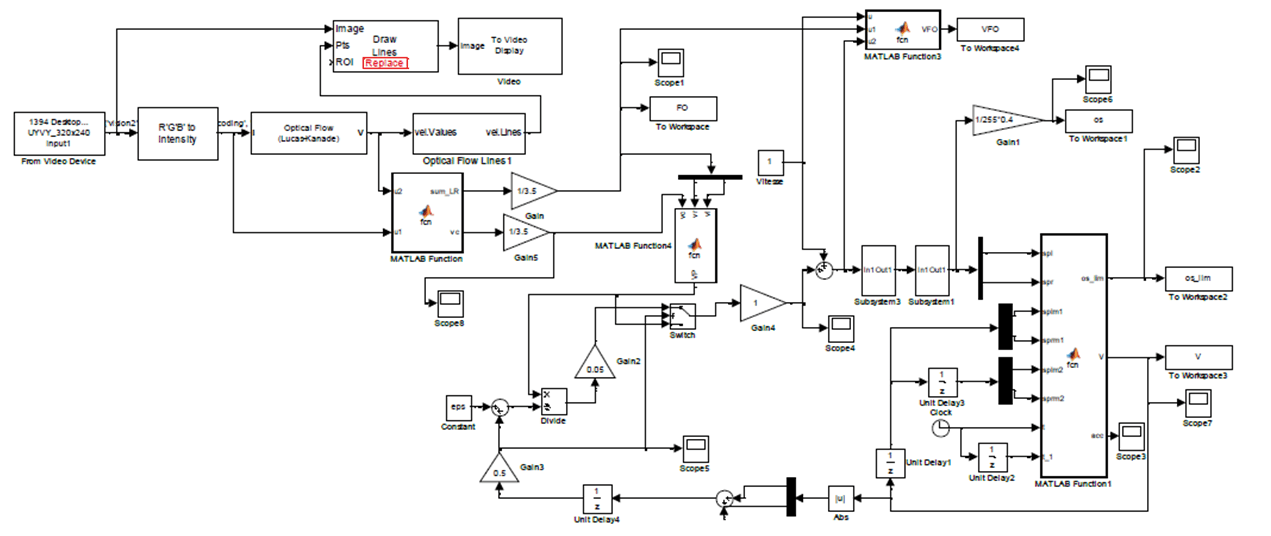
Рисунок 4.1 - Схема визуального управления мобильным роботом в MATLAB/Simulink для объезда препятствий
Эта схема формирует задания на скорость вращения колес пропорционально изменению оптического потока. В нашей работе не выполняется расчет оптического потока (двумерное дифференцирование), что значительно снижает нагрузку на вычислительное устройство системы управления.
5. Экспериментальная платформа
5.1 Мобильный робот Koala K-Team
Объектом всех опытов был мобильный робот Коала. Это мобильный робот средних размеров. Робот оснащен двумя блоками по три боковых колеса с максимальной скоростью 0,4 м/с, колеса имеют радиус 45 мм и устанавливается на оси длиной 32 см. Масса робота составляет 3,6 кг [4].
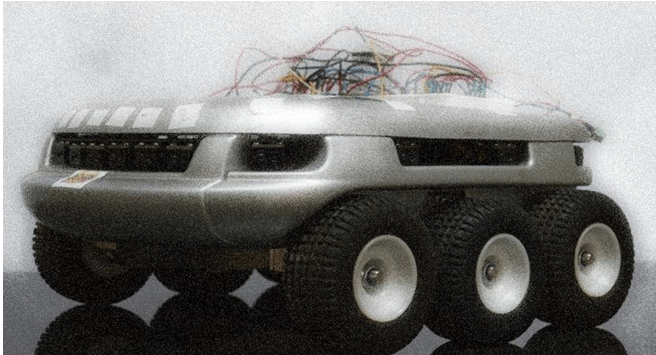
Рисунок 5.1 - Внешний вид мобильного робота Коала
Настройки работа и его функциональность можно контролировать через интерфейс RS232. Связь между компьютером и роботом Коала производится с помощью отправки и получения ASCI сообщений. Взаимодействие позволяет регулировать работу в соответствии с командами. Взаимодействие управлением функциональными ресурсами робота использует протокол команд и ответов. Коала обеспечена процессором Motorola 68331@22 МГц. Главный процессор робота имеет прямое управление питанием двигателя и может считывать импульсы энкодера. Он может вывести информацию о токе каждого двигателя, который пропорционален крутящему моменту колес.
Каждое колесо робота приводится в движение микродвигателем постоянного тока, соединенным с колесом через передающий механизм. Система управления двигателями постоянного тока базируется на использовании ПИД-регулятора, который заложен в программу главного процессора. Регулятор может работать в качестве регулятора скорости и регулятора положения. Режим активации устанавливается согласно типу заданного управления. Если регулятор получает команду на регулирование положения, то система автоматически переключается на данный вид управления.
В случае работы по скорости, регулятор в качестве входа выбирает значение скорости колес, и обеспечивает ее поддержание на необходимом уровне. Изменение скорости происходит достаточно быстро в любом направлении.
5.2 Веб-камера LogitechC310 HD
Эта камера использовалась для проведения опытов при управлении роботом с помощью оптического потока [6].

Рисунок 5.2 - Веб-камера LogitechC310 HD
Logitech C310 HD в опыте была использована со следующими характеристиками:
- разрешающая VGA 1280X720 пикселей;
- частота кадров 30 кадров в секунду.
Веб-камера такого типа подходит для видео высокой четкости с разрешением 720p и передачи данных 1 Мбит/с.
6. Система визуального управления роботом
6.1 Управление мобильным роботом Коала из среды Simulink
Разработанный блок управления роботом Коала является независимым и готовым объектом, который может использоваться во всех случаях управления мобильным роботом [7].
Программа блока выполняет следующие команды:
- указания компилятору;
- подключение вспомогательных функций;
- задачи локальных переменных;
- запоминание текущего момента времени;
- согласование времени моделирования с реальным временем;
- открывание последовательного командного порта;
- проверка параметров робота;
- преобразование данных в символьную форму;
- подача команды роботу;
- считывание ответа, значения реальных скоростей;
- преобразование данных в числовую форму;
- закрытие последовательного порта;
- расчет значений линейных скоростей и построение графика движения робота.
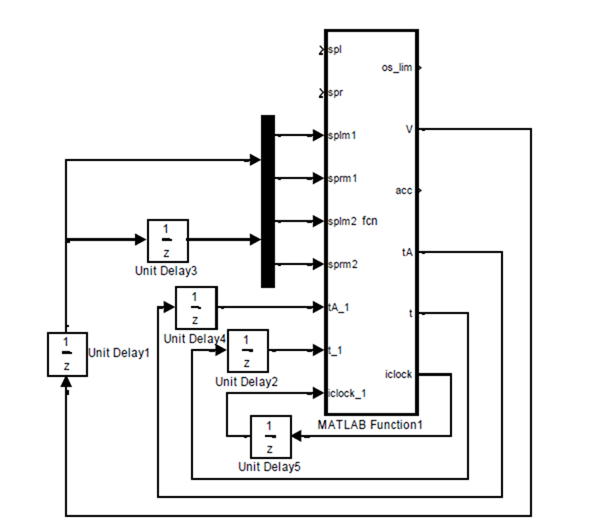
Рисунок 6.1 - Основной блок управления мобильным роботом из среды Simulink
6.2 Автомобили Брайтенберга
В 1984 году Валентино Брайтенберг (Valentino Braitenberg), известный итальянский невролог и кибернетик, профессор института биологической кибернетики им. Макса Планка в Тюбингене (Max Planck Institute for Biological Cybernetics), опубликовал небольшую книгу: Машины: эксперименты в синтетической психологии
(V. Braitenberg Vehicles: Experiments in Synthetic Psychology
, A Bradford Book/The MIT Press, 1984). Брайтенберг, используя свой принцип, что биологическое поведение легче синтезировать, чем анализировать
, изготовил из элементарных механизмов и электрических устройств 14 вариантов синтетических моделей (машинок), управляемых простейшими схемами, имитирующими сложное поведение. Ярким примером стали самоходные машины, обладающие способностью фототропизма (стремление к свету) [3].
Автомобиль Брайтенберга является автомобилем с двумя независимыми задними ведущими колесами и двумя известными передними. Направление движения робота определяется скоростью вращения задних и передних колес.
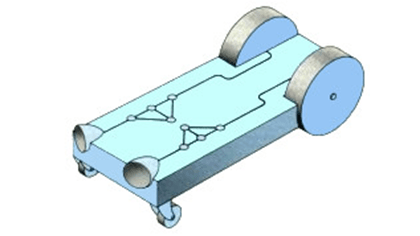
Рисунок 6.2 - Модель автомобиля Брайтенберга
Колеса прикреплены к платформе в виде сплошного параллелепипеда. К боковым граням этой платформы можно прикрепить различные датчики. Электрические цепи, соединяющие датчики с задними колесами, завершают конструкцию автомобиля. Соединительные проводники располагаются на верхней грани платформы. Автомобиль стандартной модели оснащен двумя датчиками с широким углом зрения, установленными на передней части. Каждый рецептор направлен немного в сторону от продольной оси; при таком расположении рецепторов световой источник, расположенный спереди и слева от автомобиля, действует на левый рецептор сильнее, чем на правый. Рецепторы электрически соединены с системой управления двигателями, приводящими в движение задние колеса. Сигналы, передаваемые соединительные проводниками, это последовательности дискретных электрических импульсов. Чем больше света падает на данный рецептор, тем большее число импульсов он посылает своей выходной линии. При низких уровнях освещения передается лишь несколько импульсов в секунду. При высоком уровне освещения количество импульсов велико. Предположим, что в обоих случаях импульсы посылаются с равными промежутками времени. На другом конце линий последовательности импульсов превращаются в команды, управляющие работой двигателей. Чем больше импульсов в секунду прибывает на это колесо, тем быстрее вращает его двигатель. В общем существует два варианта соединения датчиков с колесами: прямое и пересеченное. При прямом датчики соединяются с колесами находящихся с той же стороны. При пересеченном - датчик соединяется с колесом на противоположной стороне автомобиля. При попадании света в их поле зрения, поведение этих машин будет отличаться. В первом случае если, например, дело будет источник света, правый датчик получит больше света чем левый, то правый двигатель начнет вращаться быстрее чем левый. Соответственно скорость правых колес станет больше и робот начнет поворачивать влево до тех пор, пока источник света не исчезнет из виду.
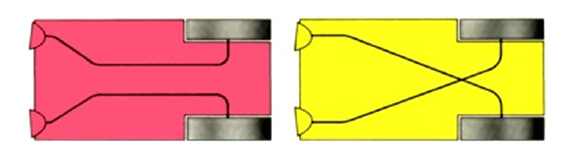
Рисунок 6.3 - Прямые (слева) и перекрещенные (справа) соединения.
В модели с перекрещенным соединением все наоборот. Модель будет не избегать свет, а ехать на него.
7. Демонстрационный режим работа Коала
Робот Коала ведет себя подобно автомобилям Брайтенберга. Есть в роботе Коала демонстрационный режим на основе алгоритма Брайтенберга. Управлять роботом можно в среде Matlab и через ZOC Terminal [9]. Для этого существуют команды, с помощью которых осуществляется общение с роботом. Режим 0, в основе которого лежит алгоритм Брайтенберга, работает следующим образом: после запуска робот должен ехать вперед, пока не появятся препятствия. Они должны быть яркими, чтобы лучше воспринимать отраженное излучение датчиками приближения.
Но конструкция робота сложнее автомобилей Брайтенберга, а именно, количество инфракрасных датчиков приближения - 16.8 левых датчиков соединены с левым двигателем. 8 правил - с правым. Алгоритм Брайтенберга можно запрограммировать на языке С++ для платформы Ардуино с микроконтроллером Атмега 2560.
Выводы
На основе проведенной работы планируется:
- применить плату Arduino, чтобы робот полностью стал автономным и без проблем объезжал препятствий(магистр Петровичева Ю.);
Рисунок – Объезд препятствия роботом (анимация: 7 кадров, 5 циклов повторения, 126 килобайт)
- разработать алгоритм движения робота так, чтобы тот мог выехать из лабиринта в тот момент, когда «увидел» свет.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение будет в декабре 2014 годаи. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список литературы
- Астапкович А.М., Анисимов А.Л., Елисеенко А.Г., Суханов И.О. Современные тенденции построения систем управления дистанционно-пилотируемыми летательными аппаратами. // В кн.: Информационно-управляющие системы для подвижных объектов. СПб: Политехника, 2002. С. 7 32.
- Основы роботехники [Электронный ресурс]. – Режим доступа: http://www.gruppa-prolif.ru/content/view/76/98/.
- Braitenberg V. Vehicles. Experiments in Synthetic Psychology / Valentino Braitenberg. – The MIT Press, Cambridge, London, 1984. – 29 p.
- Практическая робототехника [Электронный ресурс]. – Режим доступа: http://www.roboclub.ru/index/ .
- Официальный сайт Logitech [Электронный ресурс]. – Режим доступа: http://www.roboclub.ru/index/ .
- Официальный сайт Unibrain [Электронный ресурс]. – Режим доступа: http:// www.unibrain.com .
- Time To Contact [Электронный ресурс]. – Режим доступа: http://opticflow.bu.edu/research/time-to-contact-estimation .
- Мельник А.А. Мобильные роботы компании «K-Team» для решения специфических технических задач / Мельник А.А., Борисенко В.Ф., Хоменко В.Н., Плис П.С.. – Кременчук, 2010 – С. 36 – 39. – (Вісник КДПУ ім. М. Остроградського, випуск 4/2010 (63). Частина 3)
- Commande d’un robot mobile rapide aroues non directionnelles sur sol naturel. These de doctorat presentee a l’universite Рaris 6: 10.04.2008 - 198с
- Москаленко В.В. Справочник электромонтера 2005, 2-е изд., 288 стр.
- Симонович С.В. Компьютер в вашей школе. – М.: Аст-Пресс: Ин-формком-Пресс. 2001. – 16 с.