1. Вступительная часть
1.1 Актуальность
1.2 Цель и задачи работы
1.3 Практическая ценность
2. Основная часть
2.1 Многослойные нейронные системы
2.2 История развития мобильных роботов
2.3 Классификация и области применения мобильных роботов
2.4 Мобильные роботы на колесном ходу
2.5 Мобильный робот Коала
2.6 Математическое моделирование мобильного робота Коала
3 Заключение
3.1 Выводы
3.2 Дальнейшие исследования
Список литературы
1. Вступительная часть
1. 1 Актуальность
На протяжении своего существования человечество пыталось совершенствоваться, облегчать свой труд. На современном этапе развития эти задачи практически решены. Появились автоматизированные системы, которые применяются в самых различных областях человеческой деятельности. Большая часть таких систем относится к категории роботов.
Роботы сегодня постепенно проникают во все сферы жизни человека - роботов устанавливают на производстве, где они освоили самые различные профессии - от сварки до покраски кузовов автомобилей, роботы уже высадились на Марсе, и постепенно они проникают и в дома людей, пока в основном в качестве безобидных игрушек. Однако развитие роботов не останавливается ни на минуту, и наиболее интересной, но в то же время и одной из наиболее сложных задач является обучение роботов передвижению на двух, трех, четырех или шести конечностях.
В настоящее время стремительно розвиваються системы управления на основе нейронних сетей. Можно увидеть много действующих систем, управляемых на базе нейрона, ганглия или сложной нейронной сети с несколькими слоями.
Развитие електропривода распространяется на системы мощностью до десятков Ватт, которые используются в електроприводах мобильных роботов, человекоподобных роботов и других.
Актуальной является задача создания алгоритмов управления мехатронными модулями для достижения наилучших показателей со стороны динамики движения робота и динамических процессов в приводном двигателе.
1.2 Цель и задачи работы
ЦЕЛЬ МАГИСТЕРСКОЙ РАБОТЫ является разработка алгоритма управления мобильным роботом Коала на базе нейронных сетей.
ОСНОВНЫЕ ЗАДАЧИ РАБОТЫ
Исследование мобильного робота Коала является отправной точкой для развития робототехники в Донецком национальном техническом университете. Имея необходимый объект, то есть, собственно робота, появляется возможность:
изучить всю систему управления мобильным роботом, основные элементы и вспомогательное оборудование, входящие в его состав;
использовать расширения Simulink программного пакета MATLAB для моделирования электропривода и системы управления мобильного робота;
экспериментальных исследований системы электропривода при отработке типовых заданий на скорость и положение;
математического описания процессов взаимодействия ведущих и вспомогательных колес с грунтом различных характеристик;
экспериментальных исследований системы электропривода мобильного робота для различных характеристик окружающей среды, с применением различных датчиков;
обзора и разработки алгоритмов движения мобильного робота на базе нейронных сетей;
обзора алгоритмов управления манипулятором робота Катана при взаимодействии с окружающей средой;
установить ограничения на характеристики движения мобильного робота с массивным грузом
синтезировать алгоритм управления манипулятором робота с использованием трехосевого акселерометра;
синтеза алгоритма управления манипулятором робота на базе нейронной сети для взаимодействия с человеком.
1.3 Практическая ценность
Разработанный алгоритм позволит реализовать взаимодействие человека с исполнительным органом гуманоидного робота без недопустимых усилий при контакте и при снижении длительности колебательного процесса фазы взаимодеймтвия.
2 Основная часть
2.1 Многослойные нейронные системы
Окружающая нас среда жизнедеятельности — это мир разнообразных систем — экологических, биологических, технических, экономических и социальных.
Классическая теория управления успешно освоила методы довольно жесткого централизованного внешнего воздействия на различные объекты и процессы. Возникла актуальная потребность поиска путей целевого воздействия на процессы в нелинейных системах.
Особенно эффективным представляется применение таких систем многослойных нейронных сетей в новых прикладных проблемах управления, не поддающихся решению традиционными методами. Это объясняется важными отличительными характеристиками многослойных нейронных сетей: их универсальными аппроксимационными свойствами, высокой способностью к обучению, параллельной обработке аналоговых и дискретных сигналов и т.д. Отмеченные свойства таких сетей позволяют нейросетевым системам автоматически формировать эффективные алгоритмы управления, обладающие высокой степенью параметрической и структурной адаптации к внешней среде и изменяющимся задачам управления.
Разработанные авторами и излагаемые в [1] теория и алгоритмы обучения многослойных нейронных сетей получили в ней конкретное применение для синтеза нейросетевых систем управления с использованием прямых и инверсных моделей обучения. Весьма перспективным является применение этих сетей для построения новых классов нейросетевых систем на основе идей синергетической теории управления. Синергетика позволяет дать ясный ответ на методологический вопрос, почему достаточно простые законы физики отменно работают в окружающем нас весьма сложном мире и тем самым дают возможность вполне достоверно описать разнообразные явления. Все дело в том, что в динамических природных системах, имеющих много степеней свободы, происходит самоорганизация. Ее суть состоит в том, что в физических (химических, биологических) процессах выделяются несколько главных степеней свободы, называемых параметрами порядка, к которым через некоторое время «подстраиваются» все остальные степени свободы сложной природной системы. Такое «подстраивание» можно трактовать как новый «принцип суперпозиции» для нелинейных систем, как способ сборки сложных структур из простых частей. Обычно число параметров порядка невелико, что позволяет описать и исследовать сложную динамическую систему. В синергетической теории управления стратегия направленной самоорганизации состоит в формировании и поддержании внешне- и внутрисистемных динамических инвариантов. В зависимости от поставленных целей вводимые инварианты могут быть постоянными или изменяющимися, что означает соответственно стабилизацию динамического режима системы или же переход ее в новое динамическое состояние. В первом случае, говоря биологическим языком, системные инварианты реализуют «стабилизирующий», а во втором — «динамический» отборы. Другими словами, целенаправленное формирование динамических инвариантов позволяет осуществить направленную самоорганизацию систем.
Развитые в [1] теория и методы синтеза нейросетевых систем несомненно найдут свое применение для построения перспективных систем управления технологическими и подвижными объектами различного назначения. Так, очевидной областью применения нейросетевых систем является робототехника, в частности в сложных задачах управления транспортными и мобильными роботами с адаптацией к неопределенностям и противодействию внешней среды. В этом случае элементы искусственного интеллекта, вводимые в структуру систем управления мобильными роботами, могут базироваться на объединении синергетического подхода и алгоритмов обучения многослойных нейронных сетей, которые используются в качестве самообучающихся регуляторов. Такой подход позволяет реализовать синтез самообучающихся алгоритмов управления мобильными роботами путем объективного формирования архитектуры многослойных нейронных сетей на основе функционала обучения и соответствующих целей управления.
2.2 История развития мобильных роботов
Мобильный робот – это автоматический механизм, способный
передвигаться в заданной среде [2].
Понятие робот придумал Карел Чапек в 1920 году для «R.U.R». («Универсальные роботы Россума») — научно-фантастической пьесы.
В 1942 Айзек Азимов изобрел 3 закона робототехники в рассказе «Хоровод».
Во время Второй мировой войны 1939–1945 первые мобильные роботы появились в результате технического прогресса по информатика и кибернетика. Это были летающие бомбы, производившие взрыв заряда в определенном диапазоне от заданной координаты. Ракеты V1 и V2 были прототипами «автопилота» и системы автоматической детонации. Они были предками современных крылатых ракет.
Рисунок 1 — Внешний вид «летающей бомбы» и ракеты V2
В 1970 был разработан Стэнфордский «Cart line
follower», мобильный робот, который мог следить за белой
линией, используя информацию от камеры. Он имел радиосвязь с огромным
вычислительным комплексом, который выполнял необходимые расчеты [3].
Примерно в это же время (1966-1972) Стэнфордский
научно-исследовательский институт строительства проводит исследования
робота «Shakey the Robot, оснащенного фотоаппаратом,
дальномером, датчиками рельефности и блоком радиосвязи [4].
«Shakey» был первым роботом, который может
рассуждать о своих действиях. В то же время Советский Союз исследует
поверхность Луны с использованием мобильного робота
«Луноход-1».
В 1976 году в своей программе «Viking» НАСА
отправляет два беспилотных космических аппарата на Марс.
В 1995 программируемый мобильный робот «Pioneer»
становится коммерчески доступным, что позволяет широко исследовать
область робототехники и развивать университетское образование.
Мобильные роботы становятся стандартной частью университетской
программы.
Компания iRobot Corporation
С конца 1980 года Лаборатория Искусственного Интеллекта Института
Технологий в Массачусетсе играет ведущую роль в мире по разработке
роботов. Эти роботы моделировались на основе поведения насекомых, и на
базе этой работы позже развилась целая отрасль – Изучение
Поведения Роботов [5].
iRobot Corporation в 1990 году основал профессор упомянутого Института Доктор Родни Брук (Rodney Brooks) и специалисты по робототехнике Колин Энгл (Colin Angle) и Элен Грейнер (Helen Greine). Колин Энгл является пионером разработки мобильных роботов, и его работа по созданию роботов с адаптивным поведением для проектов NASA связана с исследовательской экспедицией на Марс, о которой уже упоминалось ранее.
В 1999 «Sony» представляет робота - собаку
«Aibo», который способен видеть, ходить и
взаимодействовать с окружающей средой.
В 2004 игрушечный биоморфный робот «Robosapien»,
разработанный Марком Тилденом доступен для покупателей.
В проекте «The Centibots Project» 100 автономных
роботов работают вместе, чтобы сделать карту незнакомой окружающей
среды и идентефицировать объекты в ней.
В 2008 году «Boston Dynamics» выпустила видео кадры
нового поколения мобильного робота «BigDog»,
способного ходить по ледяной местности и восстанавливать равновесное
состояние при существенных внешних возмущающих воздействиях.
В 2009 году на украинский рынок выходит компания iRobot Corporation с
моделями адаптированными и официально сертифицированными для
европейского рынка. Минус этого – появились неофициальные
продавцы.
На сегодняшний день мы имеем уникальные сложнейшие системы с большим количеством степеней свободы, очень устойчивых на различного рода поверхностях даже при физическом воздействии на них.
2.3 Классификация и области применения мобильных роботов
По виду окружающей среды, в которой движется мобильный робот:
– наземный или домашний робот. Наиболее часто встречающиеся выполнены
на колесном ходу, однако могут быть отнесены к этому классу роботы,
имеющие две и более ноги (человекоподобные, подобные животным);
– воздушные роботы, которых обычно относят к не обслуживающим воздушным транспортным средствам;
– подводные роботы обычно имеют название автономных подводных транспортных средств.
По способу движения мобильного робота:
– робот с ногами: человекоподобные ноги или животноподобные ноги;
– робот с колесами.
2.4 Мобильные роботы на колесном ходу
В настоящее время насчитывается приблизительно 300 мобильных роботов на колесном ходу, производимых зарубежными фирмами. В рамках данной работы выполняется краткий обзор и сравнительный анализ только мобильных роботов, способных передвигаться в заданной среде при помощи колес [6].
Роботы, принимавшие участие в ликвидации аварии на ЧАЭС. Специализированный транспортный робот (СТР-1) это легендарный и общеизвестный аппарат, принимавший активное участие в очистке крыши ЧАЭС от завалов высокорадиоактивных элементов разрушенного реактора. Робот эксплуатировался при уровнях гамма-фона до 3000 Рентген в час. В некоторых местах (у основания вентиляционной трубы №2) уровни излучения доходили до 10000 Рентген в час.
С его помощью удалось уберечь от облучения около 1000 человек, которые надо было бы использовать для выполнения этой работы [7].

Рисунок 2 — Специализированный транспортный робот (СТР-1)
Инвалидное кресло-коляска – приспособление для людей, не имеющих возможности двигаться как временно (из-за болезни), так и из-за инвалидности, но способных находиться в сидячем положении. 2 основные вида: человек передвигается с помощью постороннего человека и человек передвигается один [8].
2.5 Мобильный робот Коала
Рисунок 3 — Внешний вид робота Koala
(140 КБ, 4 кадра, 5 циклов)
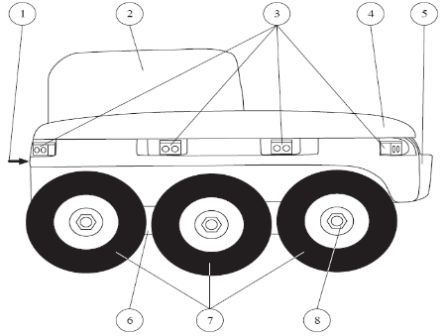
Рисунок 4 — Внешний вид и размещение основных частей робота Koala
1.Модуль управления и основные индикаторы.
2. Защитное покрытие.
3. Инфракрасные сенсоры.
4. Верхняя часть корпуса.
5. Лицевая часть корпуса.
6. Крепление колес.
7. Колеса.
8. Крепление колес.
Система управления
Каждое колесо приводится во вращение двигателем постоянного тока, соединенного с колесом через передаточный механизм с коэффициентом передачи 58,5:1. Инкрементный энкодер расположен на валу двигателя и выдает 100 импульсов за полный оборот вала двигателя. Отсюда следует получение 5850 импульсов за оборот колеса, что соответствует 22 импульсам в миллиметр при перемещении робота вперед.
Главный процессор робота имеет прямое управление питанием двигателя и может считывать импульсы инкрементного энкодера, используя специальную единицу, называемую UPP (Universal Pulse Processor). Он может также вывести информацию о токе на каждом двигателе, который пропорционален вращающему моменту колес.
Приложенное к двигателям напряжение может регулироваться главным процессором подачей его (напряжения) и отключением с заданной частотой и в течение заданного промежутка времени. Базовое переключение частоты является постоянным и достаточно высоким, чтобы не дать двигателю реагировать на единичное переключение. Поэтому двигатель реагирует на среднее время приложенного напряжения, которое может быть изменено коррекцией периода двигателя в состоянии ON. Это подразумевает, что изменяется только соотношение между периодами состояний ON и OFF, как показано на рисунке 5. Величина ШИМ определяется как время, в течение которого двигатель находится в состоянии ON.
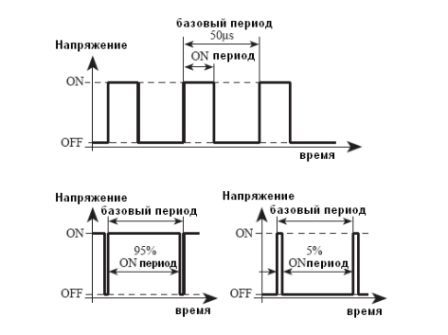
Рисунок 5 — Широтно-импульсная модуляция питающего напряжения основано на соотношении между временем состояния ON и полным периодом. Базовая частота переключения является постоянной
Значения ШИМ могут устанавливаться напрямую или могут управляться собственным контроллером двигателя. Контроллер двигателя может улучшить управление скoростью и положением двигателя, установив требуемую величину ШИМ согласно с реальной скоростью, считанной с инкрементных энкодеров.
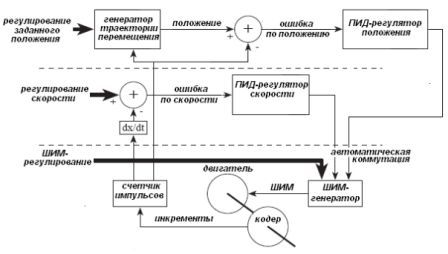
Рисунок 6 — система управления двигателем
Оба двигателя постоянного тока могут регулироваться ПИД-регулятором, выполненным на программе главного процессора [9]. Каждый член регулятора (пропорциональный, интегральный, дифференциальный) согласован с постоянной, устанавливающую вес соответствующего члена: для пропорционального, для интегрального, для дифференциального.
Регулятор может быть использован в двух режимах: регулятор скорости и регулятор положения. Режим активного управления устанавливается согласно типу заданного управления. Если регулятор получает команду регулирования положения, режим управления автоматически переключается в в режим регулирования положения.
В режиме регулирования скорости регулятор имеет в качестве входа значение скорости колес и обеспечивает поддержание этой скорости колес. Изменение скорости происходит так быстро, как возможно, в любом направлении. Никаких ограничений по ускорению в этом режиме не предусмотрено.
В режиме регулирования положения регулятор имеет в качестве входа задание на положение колеса, ускорение и максимальную скорость. Используя эти значения, регулятор ускоряет колесо пока колесо не достигнет максимального значения скорости и тормозит так, чтобы достигнуть заданного положения. Это движение осуществляется по трапеции, как это показано на рисунке 7.
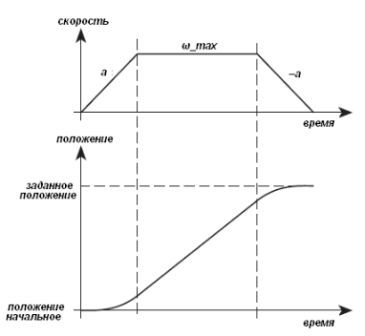
Рисунок 7 — Трапециидальная форма скорости с заданным ускорением и максимальной скоростью для достижения заданного положения
2.6 Математическое моделирование мобильного робота Коала
Робот оснащен двумя двигателями постоянного тока Была промоделирована и отлажена система управления мобильным роботом Коала в различной системе координат при подаче разных заданий.
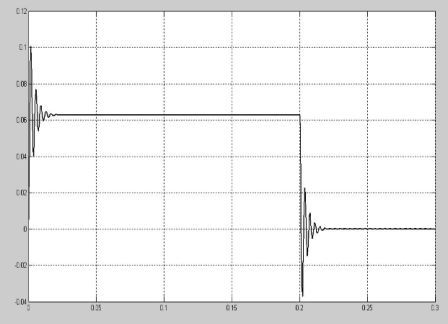
Рисунок 8 — График изменения токов
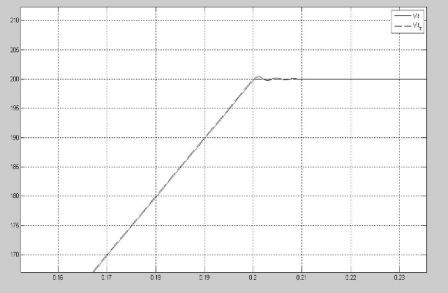
Рисунок 9 — График изменения скорости с перерегулированием
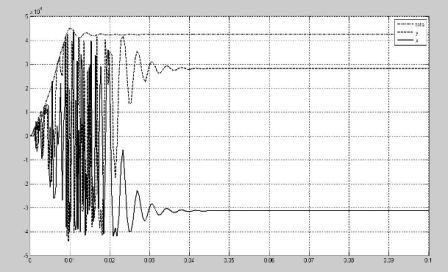
Рисунок 10 — График изменения положения и угла поворота оси
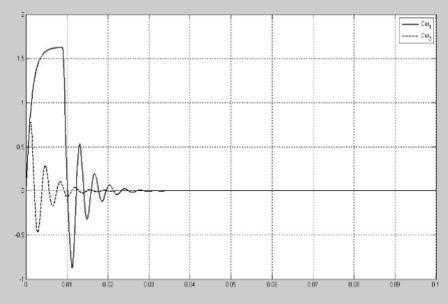
Рисунок 11 — График переходных процессов токов правого и левого колеса
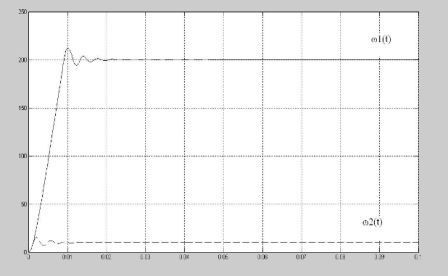
Рисунок 12 — График переходных процессов скоростей правого и левого колеса
3 Заключение
3.1 Выводы
В результате проделанной работы был исследован алгоритм Брайтенберга [10], то есть демонстрационный режим робота, промоделирована система управления мобильным робом, произведена ее отладка.
3.2 Дальнейшие исследования
В дальнейшем планируется исследование инкрементных энкодеров робота. Также планируется присоединения датчика газа, лазерного датчика расстояния, датчика влажности, датчика температуры, датчик дыма, датчика радиации для изучения алгоритмов движения робота с различной комплектацией датчиков для различных характеристик окружающей среды. Планируется математическое описание процессов взаимодействия ведущих и вспомогательных колес с грунтом различных характеристик. Также необходимо рассмотреть алгоритм движения робота Коала при совместной работе с манипулятором Катана.

 Украинский
Украинский Французский
Французский