РОЗРОБКА СИСТЕМИ КЕРУВАННЯ МОБІЛЬНОГО РОБОТА «КОАЛА» НА БАЗІ ШТУЧНОЇ НЕЙРОННОЇ МЕРЕЖІ
Автор: Петровичева Ю.М.,Афенченко В.С.
Источник: Збірник рефератів робіт з всеукраїнської конференції 2012 року — Дніпродзержинськ, ДДТУ— 2012, с. 156-158.
Автор: Петровичева Ю.М.,Афенченко В.С.
Источник: Збірник рефератів робіт з всеукраїнської конференції 2012 року — Дніпродзержинськ, ДДТУ— 2012, с. 156-158.
Вступ. Мобільний робот - це автоматичний механізм, здатний пересуватися в визначеному або невизначеному середовищі самостійно. Застосування нейронних систем в задачах керування мобільними роботами з адаптацією до невизначеностей зовнішнього середовища є актуальним. Елементи штучного інтелекту, що вводяться в структуру системи керування мобільними роботами, можуть базуватися на об'єднанні синергетичного підходу і алгоритмів навчання нейронних мереж, які використовуються в якості регуляторів, що самі навчаються особливостям навколишнього оточення. Такий підхід дозволяє синтезувати алгоритми керування мобільними роботами шляхом формування архітектури багатошарових нейронних мереж на основі функціонала навчання і відповідних цілей керування (положення робота в просторі, перетини).
Мета роботи і задачі дослідження: вдосконалення алгоритмів керування рухом мобільного робота. Для досягнення зазначеної мети необхідно було розв’язати такі задачі: 1) виконати огляд технічних характеристик сучасних мобільних роботів; 2) вивчити систему керування неголономного мобільного роботу «Коала» (фірми «Нейронікс», Швейцарія) на колесному ходу і способи його програмування; 3) розробити математичну модель робота; 4) отримати на математичній моделі дані для навчання штучної нейронної мережі системи керування робота; 5) провести експериментальні дослідження на роботі.
Матеріали і результати дослідження. Інтерес досліджень систем керування на базі штучних нейронних мереж пов’язаний з тим, що спосіб обробки інформації є подібним до мозку людини, і відрізняється від методів, які використовуються зазвичай на практиці. Мозок є складним, нелінійним комп’ютером з системою паралельної обробки інформації, який має здібність організувати свою структуру для виконання складних задач швидше, ніж сучасні комп’ютери. На підставі досліджень, виконаних в роботі, можна зробити такі основні висновки стосовно керування мобільним колісним роботом за допомогою нейронної мережі:1) нейронна мережа здатна створювати узагальнення, здатна отримувати обґрунтований результат на основі даних, які не зустрічалися в процесі навчання; 2) при будь-яких початкових умовах робот доїжджає до цільової точки найоптимальнішою траєкторією, в порівнянні із керуванням іншими методами; 3) нейронна мережа має здібність адаптувати свої синоптичні ваги до змін навколишнього середовища; 4) при пошкоджені нейрона або його зв’язку продуктивність падає незначно, тому що характер зберігання інформації розподілений; 5) паралельна структура нейронних мереж робить рішення задач керування швидким.
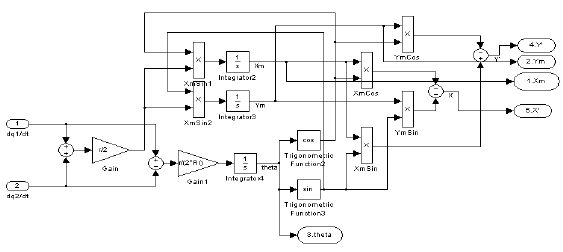
Рисунок 1 – Модель неголономного робота
Нейронна мережа, яка керує рухом робота, має три входи, один прихований шар нейронів з 19 нейронами і два виходи, функції активації – нелінійні обмежені. Використовується алгоритм зворотного поширення помилки: розраховується помилка, що виникає у вихідному шарі, і обчислюється вектор градієнта як функція ваг і зміщень. Цей вектор вказує напрямок найкоротшого спуску поверхнею для даної точки, якщо просуватися в його напрямку, то помилка зменшується. Початкові величини ваг і зміщень мережі вибираються випадковим чином, процес навчання припиняється коли реалізовано певну кількість циклів, або коли помилка досягне де- якого малого значення чи перестане зменшуватися.
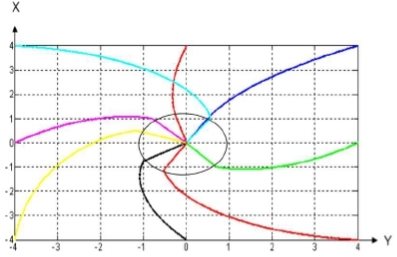
Рисунок 2 – Траекторії руху робота при різних початкових умовах
Мобільний робот під час наближення до точки з координатами (0,0), до зони, яка позначена еліпсом, веде себе як неголономна система. Траєкторія його пересування є криволінійною. Всередині зони еліпса на графіку робот рухається прямолінійною траєкторією, тобто в даній зоні він веде себе як голономний робот. Відмінність голономної системи заключається в тому, що всі зв’язки є геометричні, тобто вони накладають обмеження лише на положення (або на переміщення під час руху) точок або тіл системи, але не на величини швидкостей. Не- голономні кінематичні зв’язки не можна зводити до геометричних. Розділення механічних систем на голономні та неголономні є істотним, тому що ряд рівнянь, які дозволяють відносно просто вирішувати задачі механіки (наприклад, рівняння Лагранжа), застосовують лише до голономних систем.
Висновок. Розроблена математична модель електромеханічного мобільного робота «Коала» в пакеті MATLAB та його придатку Simulink дозволила досліджувати різні режими його роботи. Були отриманні графіки перехідних процесів в системі, проведено аналіз алгоритмів позиціонування роботу, що дозволило реалізувати навчання нейронної мережі. Результати, отримані в ході даної роботи були перевірені експериментально на неголономному мобільному роботі «Коала» (Швейцарія).
1. Медведев В.С. Нейронные сети. MATLAB 6 / В.С. Медведев, В.Г. Потемкин; под. общ. ред. к. т. н. В.Г.Потемкина. – М.: ДИАЛОГ-МИФИ, 2002. – 496 с.
2. Круглов В.В. Искусственные нейронне сети. Теория и практика. – 2-е изд., стереотип / В.В. Круглов, В.В. Борисов. – М. : Горячая линия – Телеком, 2002. – 382 с., ил.
3. Хайкин Саймон Нейронные сети: полный курс, 2-е издание / Саймон Хайкин; [пер. с англ. Н.Н. Куссуль].– М. : Издательский дом «Вильямс», 2006. – 1104 с. : ил. – Парал. тит. англ.
4. Коротков А. Послесловие к матрице: искусственный интеллект, виртуальные миры и искусственная жизнь: Учебное пособие / А. Коротков. – М. : МГИМО – Университет, 2009. – 438 с.
5. Офіційний сайт Arduino. [Електронний ресурс]: http:// www.arduino.cc
6. Башарин А.В. Управление электроприводами: Учебное пособие для вузов / А.В. Башарин, В.А. Новиков, Г.Г. Соколовский. – Л. : Энергоиздат. Ленингр. отд-ние, 1982. – 392 с., ил.
7. Аксенов С.В. Организация и использование нейронных сетей (методы и технологии) / С.В. Аксенов, В.Б. Новосельцев; под общ.ред. В.Б. Новосельцева. – Томск: Изд-во НТЛ, 2006. – 128 с.
8. Конох І.С. Комп’ютерний лабораторний комплекс для дослідження інтелектуальних цифрових систем керування електроприводом /I.С. Конох, В.В. Найда, І.С. Гула. – Кременчук, 2009 – С. 17 – 21. – (Вісник КДПУ ім. М. Остроградського, випуск 6/2008 (53). Частина 2)
9. Мельник А.А. Мобильные роботы компании «K-Team» для решения специфических технических задач / А.А. Мельник, В.Ф.Борисенко, В.Н. Хоменко, П.С. Плис. – Кременчук, 2010 – С. 36 – 39. – (Вісник КДПУ ім. М. Остроградського, випуск 4/2010 (63). Частина 3)
10. Офіційний сайт Стенфодського уныверситета. [Електронний ресурс]: http://www.stanford.edu/~learnest/ cart.htm Patrick Henaff. Mises en Oeuvre de Commandes Neuronales par Retropropagation Indirect : Application a la Robotique Mobile: Thesede docteur d’une robotique : 28.06.1994 / Patrick Henaff. - Universite Pierre et Marie Curie, 1994. – 139 c.
7. Скворцов Л. М. Адаптивные методы численного интегрирования в задачах моделирования динамических систем // Изв. РАН. Теория и системы управления. 1999. № 4. С. 72-78.