ЦИФРОВІ СИСТЕМИ РЕГУЛЮВАННЯ ПОЛОЖЕННЯ ЕЛЕКТРОПРИВОДУ
Автор: Мінтус А.М., доц., к.т.н.; Бєлов І.В., студент
Источник: ДВНЗ «Донецький національний технічний університет», м. Донецьк, Україна.
Автор: Мінтус А.М., доц., к.т.н.; Бєлов І.В., студент
Источник: ДВНЗ «Донецький національний технічний університет», м. Донецьк, Україна.
Мета роботи. Побудова системи регулювання положенням електроприводу, яка буде відпрацьовувати як постійні, так і гармонічні вхідні впливи.
Розрахункова структурна схема контуру регулювання положення (КРП) наведена на рис.1, на якому, з метою полегшення синтезу, реальне безперервне інтегрування, що встановлює зв’язок між швидкістю та положенням, замінено дискретним інтегруванням за методом трапецій:
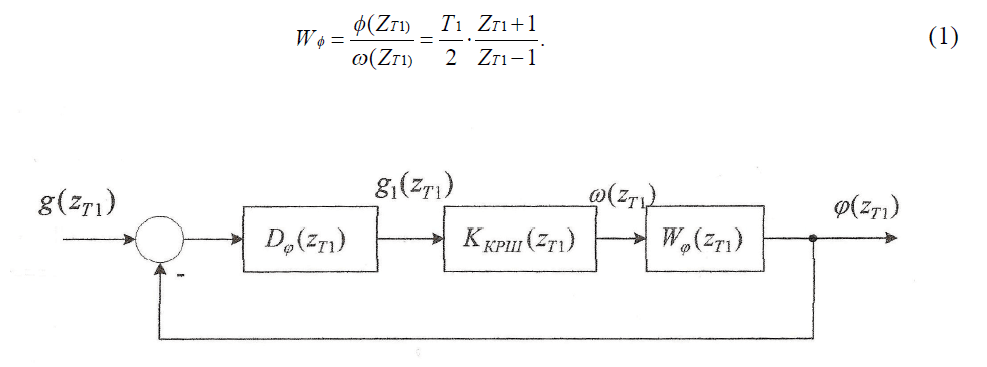
Рисунок 1 - Розрахункова структурна схема СРП
Система виконана з лінійним регулятором положення, передавальна функція якого має вигляд:

де  - відносна стала інтегрування розімкненого КРП.
- відносна стала інтегрування розімкненого КРП.
В якості внутрішнього контуру представлена розрахункова схема багатократного цифрового дворазово інтегрувального контуру регулювання швидкості (КРШ) з передавальною функцією 
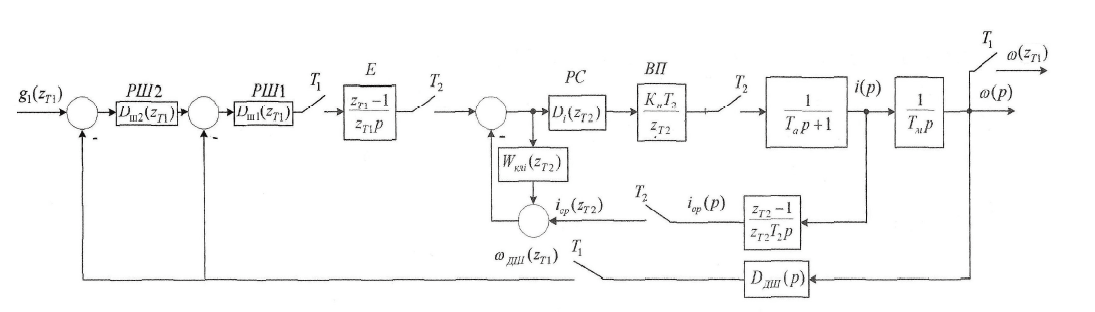
Рисунок 2 - Розрахункова схема багатократного цифрового дворазово інтегрувального КРШ.
У структурній схемі:
Кп – коефіцієнт підсилення, Тм – електромеханічна постійна часу, Та – електромагнітна постійна часу,  – кратність періодів квантування в контурі регулювання струму (T2) та зовнішніх контурах (T1).
– кратність періодів квантування в контурі регулювання струму (T2) та зовнішніх контурах (T1).
Контур регулювання струму налаштовується відповідно умовам зміни середнього значення струму при стрибку завдання за експонентою:
де  – бажана стала часу експоненти.
– бажана стала часу експоненти.
Передавальна функція регулятора струму (РС) має вигляд:

де 
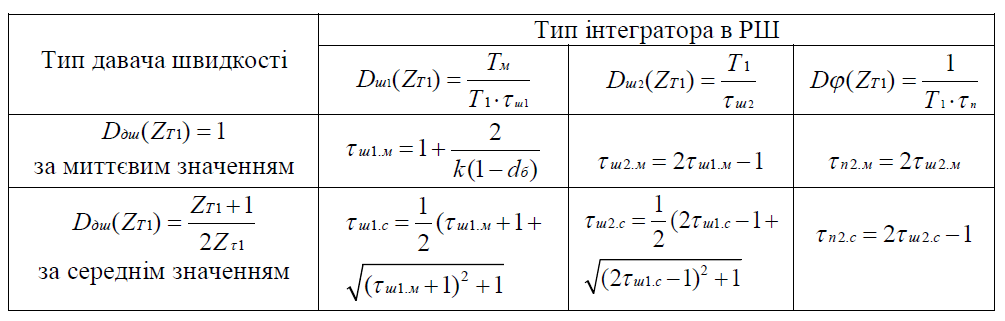
Контури регулювання швидкості й положення налаштовані за умов модульного оптимуму. Передавальні функції відповідних регуляторів і вирази для пошуку відносних сталих часу інтегрування відповідних контурів наведено в табл.1.
Таблиця 1 – Формули для знаходження відносних сталих часу
Налаштування за модульним оптимумом забезпечує прийнятну швидкодію при малому перерегулюванні. Це передбачає доцільність поліпшення точності відпрацьовування задавальних впливів, що є подальшою метою дослідження.
1. Фишбейн В.Г. Расчет системы подчиненного регулирования вентильного электропривода постоянного тока. –М.: Энергия, 1972. – 135с.
2. Коцегуб П.Х., Баринберг В.А. Синтез двукратно-интегрирующей цифровой системы подчиненного регулирования скорости электропривода с двумя периодами квантования. – Известия вузов. Электромеханика. –1991. -№9. –С.11-17.