КОАЛА. РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ (KOALA. USER MANUAL)
Автор перевода: Афенченко В.С.
Источник: книга Koala. User manual
.
Автор перевода: Афенченко В.С.
Источник: книга Koala. User manual
.
Теперь будем контролировать перемещение робота. Убедитесь, что последовательный канал установлен правильно, затем откройте Motors VI. Сейчас ваш экран показывает следующую панель:
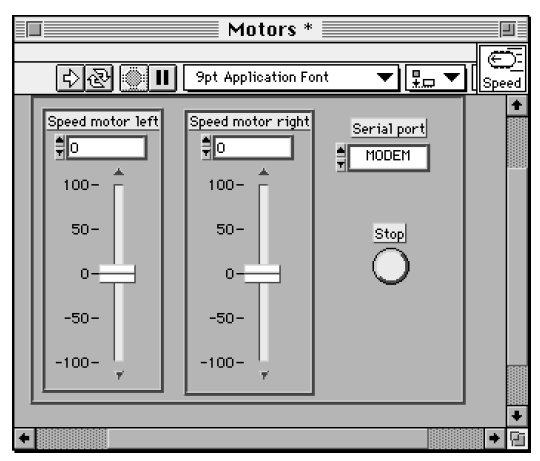
Рисунок 19: Панель двигателей: 2 ползунка контролирующие скорость каждого колеса.
Перед перемещением робота, вы должны научиться остановливать его. Доступными различнми средствами. Начнем с наиболее эффективных:
Вы управляете непосредственно каждым из двигателей, необходимо задать нужное значение скорости. Есть два способа действий:
Возможные значения ограничены от -10 до +10, чтобы не пострадала
механика. Для передачи сигнала роботу, просто один раз нажмите на
стрелочку. Измените значения и нажмите снова. Вы видите, что робот не
продолжает двигаться с той же скоростью, пока новое значения отправляется.
Если вы получаете bored нажав на стрелку, попробуйте один щелчок на
двойную стрелку. Нажмите на иконку остановки  ,
чтобы остановить выполнение.
,
чтобы остановить выполнение.
Робот имеет два дополнительных датчика на колесах. Используя эти
датчики можно измерить смещение и скорость каждого колеса в любой
момент. VI Get_position
спросит за содержание приращения счетчика,
которое представляет собой смещение колеса. Устройство смещения
соответствуют 0,045 мм.
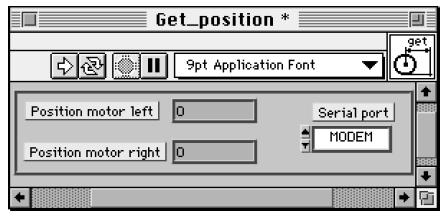
Рисунок 20: Get_position панель: 2 индикатора, показывающие положение каждого колеса.
Чтобы проверить функциональные возможности этого модуля просто нажмите
на двойную стрелку, чтобы начать рецидивирующий режим пробега. В этот
момент VI покажет вам фактическое положение каждого колеса. Чтобы изменить
положение колеса используйте Motors
VI, как описано выше, и наблюдайте
результат на Get_position
VI. Для установки счетчика положения до
заданного значения вы можете использовать Set_position
VI.
Get_speed
VI отображения скорости каждого колеса. Это значение
вычисляется роботом, на основе информации о положении и времени.
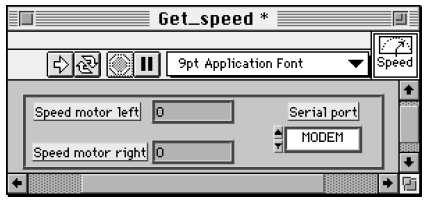
Рисунок 21: Get_speed панель: 2 индикатора показывают скорость каждого колеса.
Чтобы проверить функциональные возможности этого модуля просто нажмите
на двойную стрелку, чтобы начать рецидивирующий режиме пробега.
В этот момент VI покажет вам реальную скорость каждого двигателя.
Чтобы изменить скорость двигателей используйте Motors
VI, как
описано выше. Вы может также попытаться установить скорость вращения
электродвигателя до 15 с помощью Motors
VI, или замедлить колеса
пальцами и смотреть в результате на Get_speed
VI.
Кроме того, можно подать на робота позиции, выражаемые с
помощью позиции из двух колес и скорости профиля для достижения этих
позиций (как описано в разделе 2.1.5 данного руководства). Конечное
положение робота может быть предоставлено Control_position
VI:
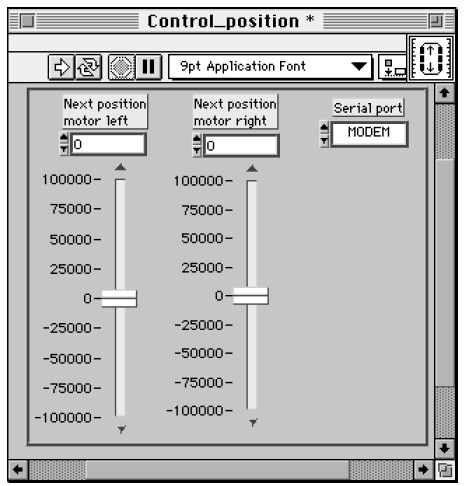
Рисунок 22: Control_position панель: 2 ползунка, управляющие позициями, достигающими каждым из колес.
Этот VI связана с Conf_pos_param
VI, которые устанавливают все
параметры из профиля скорости:
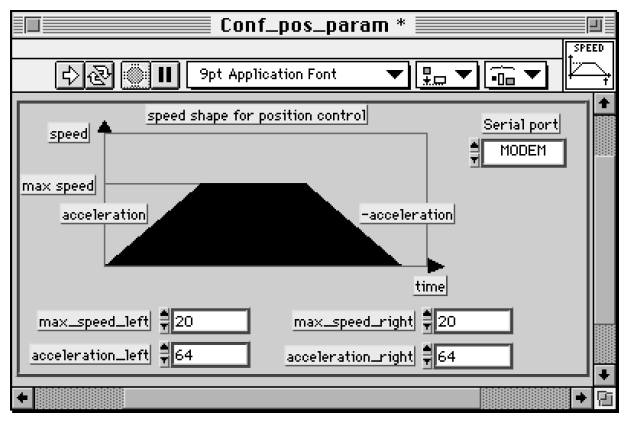
Рисунок 23: Conf_pos_param панель: все параметры профиля скорости можно контролировать.
Для проверки управления положением, пожалуйста, выведите настройку на 0
обоих габаритных счетчиков двух колес, используя Set_position
VI или
сброс робота. В этот момент вы можете попробовать установить расстояние
1000 на обоих ползунках для запуска Control_position
VI раз, нажав на
стрелку выполнения. Тестовые другие движения сохраняя для правого и левого
смещения идентичны.
Чтобы начать другие виды траектории, необходимо вернуть робота в положение 0 или
использовать Set_position
VI для сброса счетчика. Затем с помощью
Conf_pos_param
VI установить слева максимальную скорость до 10, слева
ускорение до 32, и задайте значения правой траектории по
умолчанию, указанном на рисунке 24. Запустите VI один раз, чтобы сделать
эти свойтва действительными. Затем установите, на Control_position
VI,
положение левого колеса до 1000 и положение правого колеса до
2000. Запустите VI еще раз и наблюдайте за траекторией робота.
1. Koala. User manual/ Version 2.0 (silver edition)/ K-Team S.A./ Lausanne, 29 mai 2001. http://www.k-team.com