ДОСЛІДЖЕННЯ СПОСТЕРІГАЧІВ НЕВИЗНАЧЕНОСТЕЙ У
СИСТЕМАХ ЕЛЕКТРОПРИВОДУ НА БАЗІ СДПМ
В.В. Божко, В.М. Трандафілов
Донецький національний технічний університет
В роботі проведений синтез та аналіз спостерігачів моменту
статичного опору (еквівалентних та розширених) в системі
векторного керування синхронним двигуном з постійними магнітами.
Досліджено вплив варіації моменту інерції на роботу приводу.
Запропоновані методи ідентифікації реального значення моменту
інерції.
В останні десятиріччя відбувся значний розвиток елементної бази
та програмних засобів, який дозволив реалізовувати складні системи
автоматичного керування, якими є системи зі спостерігачами стану
(СС). СС використовують для оцінювання значень координат, які
неможливо або важко виміряти відповідними датчиками [1]. До таких
координат можна віднести момент статичного опору Мс, інформація
про який може бути використана, наприклад, для мінімізації помилки
регулювання швидкості, формування енергозберігаючих тахограм,
запобігання пробуксовки та ін.
Зараз найбільш перспективною електричною машиною є
синхронний двигун з постійними магнітами (СДПМ), який у зв’язку з
його перевагами поступово витісняє двигуни постійного струму та
асинхронні.
Оскільки момент статичного опору є невимірним збуренням, то
для його відновлення зазвичай використовують розширені СС (з
додатковим інтегратором в каналі навантаження моделі об‘єкта
регулювання). Однак, існують варіанти ідентифікації Мс за допомогою
еквівалентних СС з корекцією за швидкістю двигуна або за його
положенням.
Якщо двигун оснащений датчиком положення ротора (ДПР), що
має місце для електроприводів на базі СДПМ, то СС, замкнений за
положенням, може відновити не тільки момент статичного
навантаження, але і кутову швидкість ротора. В такому випадку
відпадає необхідність у диференціюванні сигналу від ДПР [2].
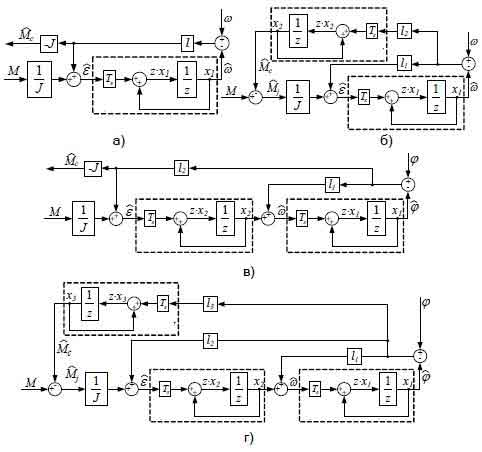
Структурні схеми дискретних еквівалентних та розширених СС
наведені на рис. 1.
На рис. 1 прийняті наступні позначення: M – електромагнітний
момент двигуна; – період дискретності СС; – відновлене і
виміряне кутове положення вала двигуна відповідно; –відновлена і виміряна кутова швидкість двигуна відповідно; J –сумарний момент інерції, приведений до вала двигуна, , де p –
оператор Лапласа, l – вектор коректувальних коефіцієнтів СС (для
забезпечення бажаного характеристичного полінома (ХП) системи). В
нашому випадку коефіцієнти вектора l забезпечують ХП, який
відповідає аналоговому прототипу з біноміальними коефіцієнтами
відповідного порядку.
Рис. 1. Структурні схеми СС:
а) еквівалентний, замкнутий за швидкістю; б) розширений, замкнутий за швидкістю; в) еквівалентний, замкнутий за кутовим положенням; г) розширений, замкнутий за кутовим положенням
На рис. 2 представленні перехідні процеси реального моменту статичного опору та відновлених за допомогою СС.
Рис. 2. Реальний та відновлений момент статичного опору
З рис. 2 можна побачити, що найшвидше Мс відновлює СС,
замкнений за кутовою швидкістю (еквівалентний), а довше всіх – СС,
замкнений за кутовим положенням (розширений). Це пов’язано з
наявністю більшої кількості інтеграторів у останнього. Спостерігач,
замкнений за кутовою швидкістю (розширений) та замкнений за
кутовим положенням (еквівалентний) працюють приблизно однаково.
Єдиним параметром об’єкта керування, який використовується в
СС, є сумарний момент інерції привода. В загальному випадку
неможливо достовірно розрахувати це значення. В деяких випадках
момент інерції може змінюватися в процесі роботи (кривошипно-
шатунні, ексцентрикові механізми, роботи, маніпулятори та ін.).
На рис. 3 приведені перехідні процеси в системі електроприводу
при роботі від задатчика інтенсивності у випадку невірного
налаштування системи.
Рис. 3. Перехідні процеси в системі електроприводу у випадку
невірного налаштування системи
Відхилення моменту інерції від значення, на яке налаштована
система (Jo) призводить до невірного відновлення моменту статичного
опору на ділянках розгону та гальмування. Також у разі збільшення
реального моменту інерції зменшується швидкодія, а при зменшені –
підвищується коливальність.
Для визначення дійсного значення моменту інерції можуть бути
запропоновані наступні методи.
Метод вільного вибігу дозволяє з достатньої для практиці
точністю визначити момент інерції. Але даний метод потребує
проведення експерименту за результатами, якого необхідно одержати
залежність Мс=f(ω) та криву вибігу. Метод вільного вибігу може
використовуватись для механізмів, в яких момент інерції змінюється
незначно.
Метод з використанням спостерігаючого пристрою [3].
Недоліком цього методу є те, що в цьому випадку не враховується
момент статичного опору.
Метод ідентифікації моменту інерції, заснований на ідентифікації
момент статичного опору з використанням СС [4]. Даний метод
потребує запуску двигуна за трапецеїдальною тахограмою і не
дозволяє визначати момент інерції в реальному часі.
Перспективними є методи визначення реального моменту інерції,
які засновані на побудові адаптивних моделей.
Висновки:
Синтезовані СС можна використовувати для відновлення
статичного моменту опору. СС, замкнений за положенням, може
відновити не тільки момент статичного навантаження, але і кутову
швидкість ротора.
Відхилення моменту інерції від значення, на яке налаштована
система призводить до невірного відновлення моменту статичного
опору на ділянках розгону та гальмування.
Перспективними є методи визначення реального моменту
інерції, які засновані на побудові адаптивних моделей.
Бібліографія
Толочко О. І. Аналіз та синтез електромеханічних систем зі
спостерігачами стану: навчальний посібник для студентів вищих навчальних
закладів / О. І. Толочко – Донецьк: Норд-Прес, 2004. – 298 с.
Толочко О. И. Особенности идентификации электромеханической
постоянной времени и момента статического сопротивления в системах
позиционного электропривода / О. И. Толочко, П. И. Розкаряка, Г. С. Чекавский //
Темат. вып. «Проблемы автоматизированного ЭП. Теория и практика» журнала
«ЭЛЕКТРОИНФОРМ» – Львов: ЕКОинформ, 2009. – С. 74–75.
Башарин А.В. Управление электроприводами: Учеб. пос. для вузов / А.В.
Башарин, В.А. Новиков, Г.Г. Соколовский – Л.: Энергоиздат. Ленингр. отд-ние,
1982. – 392 с.
Толочко О.И. Особенности идентификации электромеханической
постоянной времени и момента статического сопротивления в системах
позиционного электропривода / О.И. Толочко, П.Х. Коцегуб, П.И. Розкаряка, Г.С.
Чекавский // Тем. вып. «Проблемы автоматизированного ЭП. Теория и практика»
журнала «ЭЛЕКТРОИНФОРМ» – Львов: ЕКОинформ, 2009. – С. 59–62.
 – період дискретності СС;
– період дискретності СС; – відновлене і
виміряне кутове положення вала двигуна відповідно;
– відновлене і
виміряне кутове положення вала двигуна відповідно; –відновлена і виміряна кутова швидкість двигуна відповідно; J –сумарний момент інерції, приведений до вала двигуна,
–відновлена і виміряна кутова швидкість двигуна відповідно; J –сумарний момент інерції, приведений до вала двигуна,  , де p –
оператор Лапласа, l – вектор коректувальних коефіцієнтів СС (для
забезпечення бажаного характеристичного полінома (ХП) системи). В
нашому випадку коефіцієнти вектора l забезпечують ХП, який
відповідає аналоговому прототипу з біноміальними коефіцієнтами
відповідного порядку.
, де p –
оператор Лапласа, l – вектор коректувальних коефіцієнтів СС (для
забезпечення бажаного характеристичного полінома (ХП) системи). В
нашому випадку коефіцієнти вектора l забезпечують ХП, який
відповідає аналоговому прототипу з біноміальними коефіцієнтами
відповідного порядку.