

Abstract – Permanent magnet synchronous motors are used in many industrial applications because they have several inherent advantages. However, information about the rotor position is necessary even to be able to control drive speed. Conventional speed and position detection uses encoder and resolver. These sensors significantly increase price, weight, and degrade reliability. Therefore many authors publish papers about algorithms for rotor position and speed estimation. One of state estimation possibility is using extended Kalman filter. Conventional algorithms based on EKF are developed using a simple model of permanent magnet synchronous motor, thereby provide bad performance in the low speed range. Extended Kalman filter using an interior permanent magnet synchronous motor model is described in this paper. This model makes possible for EKF to operate in low speeds. Second part of this paper describes an algorithm Model Reference Adaptive system (MRAS).
Keywords – sensorless control, synchronous machine, PMSM, EKF, MRAS
Permanent magnet synchronous motors have are used in many industrial applications because they have several inherent advantages e.g. rugged construction, easy maintenance, high power factor, high efficiency and suitability for wide speed ranges of constant power operation. However, information about the rotor position is necessary even to be able to control drive speed. Conventional speed and position detection uses encoder and resolver. These sensors significantly increase price, weight, and degrade reliability.
ition and speed estimation. Most of these algorithms are based on state estimation. One of state estimation possibility is using an extended Kalman filter (EKF) with α-β stationary axis model. Conventional algorithms base on EKF are developed using a simple model of permanent magnet synchronous motor ( Ld = Lq = Ls ), thereby provide bad performance in the low speeds. Extended Kalman filter using the model of interior permanent magnet synchronous motor (IPMSM) is described in this paper. Model of IPMSM ( Ld ≠ Lq ≠ Ls ) makes possible for EKF to operate in low speeds, because information about rotor position is contained in changes of stator inductance [4].
Second part of this paper describes an algorithm Model Reference Adaptive system (MRAS). The MRAS is used for comparing results with EKF. Some state variables (e.g. rotor flux-linkage components or back e.m.f. components) of the permanent magnet synchronous motor are estimated in a reference mode. These variables are then compared with state variables estimated by using an adaptive model. The difference between these state variables is then used in an adaptation mechanism, which outputs the estimated value of rotor speed and adjusts the adaptive model until satisfactory performance is obtained.
Mathematical model of interior permanent magnet synchronous motors in the α-β stationary system is described by equations (1).
where
Lα=L0+L1cos2θ
Lβ=L0-L1cos2θ
Lαβ=L1sin2θ
and
L0=(Ld+Lq)/2
L1=(Ld-Lq)/2
uα, uβ stator voltage components in stationary frame;
iα, iβ stator current components in stationary frame;
ωs rotor speed (electrical speed);
θ rotor position (electrical angle);
Ld, Lq stator inductances
Ψaf denote the flux linkage of the rotor magnet without stator current
The mathematical model of a PMSM drive is defined in the rotating reference frame α-β. Inputs of the model are 3-phase voltage signals. The three-phase windings are represented by phases a, b, c. That is way the observer needs the correct signal transformation, such as Clarke’s transformation.
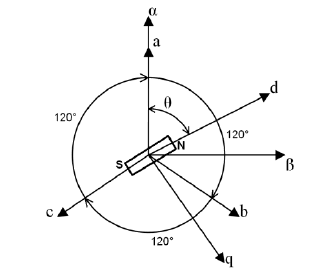
Clarke transformation is used for transforming values (current, voltage, flux) from the three-phase stationary coordination system to α-β stationary orthogonal coordination system.
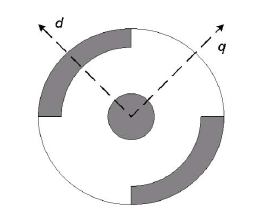
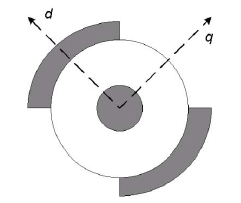
Fig. 1. shows interior permanent magnet motor with salient rotor type. Fig. 2. shows surface permanent magnet motor with non-salient rotor type[1].
Let us assume that our process has a state vector x∈Rn with a measurement y∈Rn and then the process is managed by the non-linear stochastic difference equation:
xk=f(xk-1,uk,ωk-1)
yk=h(xk, vk)
ωk, vk random variables represent the process and measurement noise
f non-linear function relates the state at the previous step (k-1) to the state at current time step k
The equations for the extended Kalman filter fall into two groups: time update and measurement update equations. The time update equations are responsible for projecting forward (in time) the current state and error covariance estimates to obtain the priori estimates for the next step. The measurement update equations are responsible for incorporating a new measurement into priori estimate to obtain an improved posteriori estimate [3][7].
1. Time update equations

2. Measurement update equations

Linear stochastic difference equations derived from mathematical model (1) of IPMSM:
x(k+1)=Mx(k)+Nu(k)+ω(k)
y(k)=Cx(k)+v(k)
where
M=(I+J*Tst )
N=N*Tst uk-1
I identity matrix;
Tst sampling period;
J Jacobian matrix of partial derivation of non-linear function f;
and

In this case MRAS estimator uses two models to calculate a stator flux-linkage of the PMSM. One model is a reference and the other is an adaptive model [2][6].
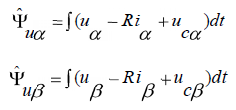
These two equations correspond to a stator voltage model, which does not contain the rotor angle and is therefore a reference model. PI-type controller is used to generate correction term uc to correct the offset error in the integrator.

These two equations represent the current model, which contains the rotor angle, and therefore represents the adaptive model.
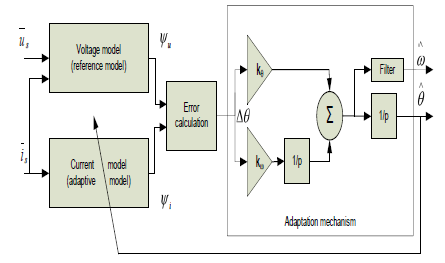
The outputs of these two models are compared in an adaptation mechanism to estimate the adjustable parameter that tunes the adaptive model in order to drive the output error between these models to zero.
The adaptation mechanism uses the angle error Δθ as corrective information to calculate the adjustable parameter θ in the adaptive model.

The adaptation mechanism which estimates the adjustable parameter θ is a PI-type series controller with a integrator [2][6].

Algorithms for sensorless control were implemented to the DSP Freescale. Data for calculation errors and graphs were uploaded to the PC by JTAG port. DC bus is fed by switchmode power supply with low level noise. Noise from DC bus and primary output of PWM has expressive influence on extent of the error.
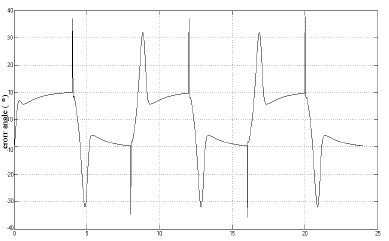

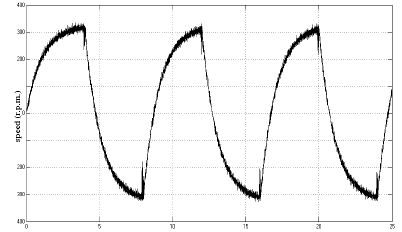
PMSM is controlled by vector control algorithm and the information of rotor position is obtained by a optical incremental sensor at testing MRAS and EKF with a simple model ( Ld = Lq = Ls ). If the information about rotor position is taken from the estimation, it could evoke an unpredictable and unstable control situation in the area of low speeds. Figure 4.a) and Figure 5.a) show increase of error when rotor speed is close zero and further we can observe error increase when fast speed change in MRAS. Error value is calculated from the estimation of EKF, which works with a model using change of stator inductance Figure 5.a). The error position is dependent on the size of stator inductance change, but in this case is only 20%. Figure 5.b) and Figure 5.c) shows improve estimation around zero speed region.




The parameters of PMSM:
R - stator resistance = 44Ω
Ld - d axis inductances = 0.035 H (200Hz)
Lq - q axis inductances = 0.044H (200Hz)
Ψaf - flux linkage of the rotor magnet = 0,195 Wb
J - the moment of inertia = 0.0125kgm2
pp - number of pole pairs = 3
Simulation shows problems with stability and increasing of error value when rotor speed is near zero. When the MRAS scheme described above is used in a vector controlled PMSM drive, speed reversal through zero during a fast transient process is possible, but if the drive is operated at zero speed for more then few seconds, the speed control is lost due to the incorrect flux-linkage estimators. EKF with a simple model ( Ld = Lq = Ls ) is useless at zero speed region, because evokes unstable speed control situations. EKF with a model ( Ld ≠ Lq ≠ Ls ) shows improvement estimation at zero speed region.
The research has been supported by Czech Science Foundation under the project GA P103/10/0647 "Intelligent Electrical Drives Predictive and Robust Control Algorithms", the Ministry of Education of the Czech Republic under the project 1M0567 "Center for Applied Cybernetics" and by Freescale Semiconductor Czech Republic (former division of Motorola)