
Сontenu
- introduction
- 1. L’etat de question
- 2. Les movement de la personne
- 3. Les particularites d’emplacement des accelerometres pour mesurer le mouvement humain
- 4. Les particularites d’emplacement des accelerometres pour mesurer le mouvement humain
- 5. Les resultats des etudes experimentales
- 6. Conclusion
- Bibliographie
introduction
L'activite physique de pa personne – l'un des phenomenes les plus complexes du monde materiel. Il est complexe, car il est tres difficile de fonctionner a partir d'une position physique de mouvement. Il est polyvalent, car il implique la conscience comme un produit de la matiere la plus organisee – le cerveau. Tot d’abord nous parlons de l’ activite de la personne qui est consciente et deliberee, de la comprehension de son sens, de la possibilite de controler et d'ameliorer systematiquement leur mouvement. A l’aide de l'activite motricel’homme transform activement le monde, sa propre nature, de s'exprimer dans l'interaction physique avec le monde exterieur, et en meme temps il ameliorer physiquement. A cause de des caracteristiques anatomiques du corps humain, il est tout le temps sous l'attention constante et il est l'objet de nombreuses institutions de recherche. Aujourd'hui on existe beaucoup de nombreuses etudes anatomiques, physiologiques, mecaniques, environnementales, sociologiques et psychologiques qui sont concus pour aider a identifier les elements cles et les lois de fonctionnement anatomique du corps humain. Ces etudes sont utilisees dans une tentative de creer une des methodes modernes pour evaluer le mouvement humain en fonction de ses nombreuses maladies.
1. L’etat de question
Mobilite et la nature physique des activites menees par l'homme pour la vie, ont un grand impact sur la sante, la fonctionnalite physique, la vigueur et la vitalite de la personne. L'activite physique affecte sur la qualite de la vie humaine.
Le niveau d'activite physique est influencee par de nombreux facteurs, comme un facteur social, dont les gens interagissent avec leur environnement le plus proche et d’autre la communaute. L'environnement qui l'entoure a un impact important sur la facon dont une personne effectue un mouvement (le style, la forme, la quantite de mouvement). Par exemple, si il habite en milieu urbain ou rural, lui-meme ou famille vit; quel type de travail ( lourd ou leger lui-meme ou en equipe ) et combien il fait, etc, tout ca peutcontribuer a la definition du type de son chemin demarche, le type de la deplacer
Les facteurs psychologiques et emotionnels influencent pour le mouvement d'une personne, ce qui reflete l'etat emotionnel et psychologique de chacun, par exemple, la satisfaction de la vie, ou l'absence de celui-ci, ou un sentiment de bonheur ou son echec, la confiance en soi, etc. tandis que dans leur environnement.
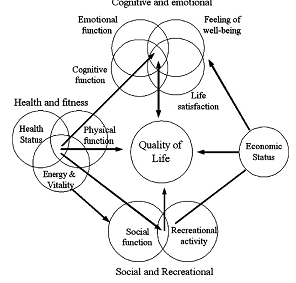
image 1 - facteurs qui influent sur la qualite de vie et la sante humaine.
La figure 1 est une bonne representation de l'influence de l'intensite et le type de mouvement sur la sante humaine et pourquoi il est important de maintenir le mode de vie actif.
Comme on le voit sur la figure, tous les mouvements sont interdependants et par consequent une violation de l'un des ceux-ci peuvent conduire a une reaction en chaine de problemes.
Dans les domaines du fonctionnement humain est un travail complexe de scientifiques en genie, les champs biologiques et psychologiques dans le but d'obtenir les connaissances necessaires dans la facon dont les gens menent leurs activites quotidiennes, et les competences pour surveiller et maintenir la sante dans l'exercice de ces activites.
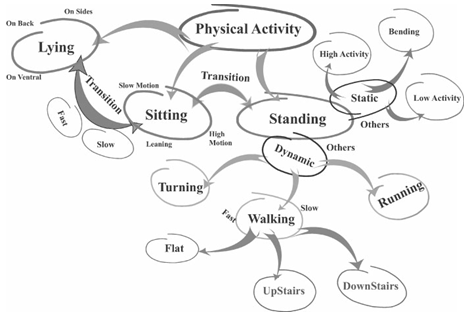
image 2 – L`activite physique de la personne
L’une des techniques modernes est une mesure directe de mouvemant a l'aide de l'accelerometre, qui a ete propose dans les annees 1970, mais il etait assez seulement ameliore dans les 10–15 dernieres annees.
La mesure directe utilisant l'accelerometre – c’est introduction reussie d'un dispositif de faible puissance avec des capteurs a faible cout qui peut etre massivement utilises dans les environnements cliniques et domicile pour un suivi constant et continu (controle) des patients en fonction de leur mobilite et le type de mouvement Resultats qualitatifs et quantitatifs (donnees) fournies par ces capteurs permettent aux ingenieurs et medecins a travailler ensemble pour etre en mesure de maximiser l' efficacite et la rapidite d'aider leurs patients a surmonter leurs maux.
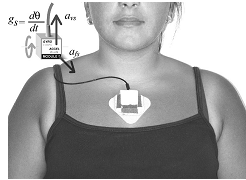
image 3. [ Emprunte de Aminian et al.( 2003)]

image 4. [ Emprunte de Aminian et al.(2004)]
Leader dans le domaine de la mesure quantitative des parametres de mouvement des membres et l'ensemble du corps est une societe Vicon britannique, qui produit des equipements et des logiciels specialises pour les systemes de capture de mouvement optique marqueurs en trois dimensions. Le principe du systeme est basee sur une combinaison de la methode d'analyse quantitative de la marche et l'electromyographie imagerie tridimensionnelle.
La base technique pour le systeme sont des cameras infrarouges qui vous permettent d'enregistrer le mouvement a 200 images par seconde. Ils recoivent des informations sur retroreflechissants capteurs speciaux marqueurs qui sont resolus dans un certain ordre de la peau humaine. Il faut dire que le nombre et l'emplacement de ces marqueurs joue un role important dans l'etude elle-meme [7].

image 5 – Vicon.
Microsoft Kinect – technologie de reconnaissance de mouvement humain, sur la base de plusieurs cameras et laser. Il convient de noter le fait que la detection de mouvement ne doivent entrer dans le champ de la camera de vision – pas de controleurs supplementaires pour reprendre n'est pas necessaire. Il ya quelque temps, Kinect fourni seulement comme un peripherique pour les consoles Xbox 360 de Microsoft, mais maintenant ecrit SDK a utiliser l'ordinateur, et Kinect lentement progressivement active dans divers domaines de l'activite humaine, principalement utilise dans la medecine et l'education [8].

image 6 – Microsoft Kinect
L’eterprise Xsens est un fournisseur de systemes 3D de capture de mouvement a base de capteur MEMS miniature (technologie de capteur inertiel). La societe a cree un produit complexe dans le domaine des systemes de capture de mouvement multi-touch. Le produit combine les algorithmes de traitement des donnees, provenant porte sur le corps et le reseautage datchikoa eux-memes capteurs inertiels directement dans une version speciale Xsens produits sont largement utilises dans l'industrie, l'industrie du divertissement, de formation et de simulation pour les problemes de la biomecanique [9].

image 7 – Xsens
2. Les movement de la personne
Etude des composants physiques du mouvement humain necessaires pour une comprehension complete des processus physiologiques de l'homme et l'adoption de bon suivi du traitement des maladies et des troubles associes avec le mouvement de la personne [1].
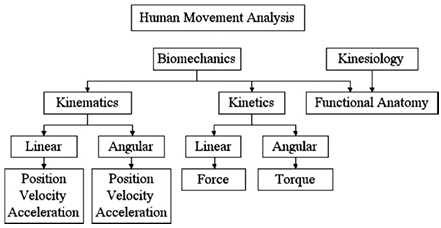
image 8 – Aspects du mouvement humain .
Aspects du mouvement humain :
- analyse kinesiologie
- analyse biomecanique
Dans l'etude de divers aspects du trafic utilisent generalement deux approches: les approches qualitatives et quantitatives .
Approche qualitative est que les donnees sont recueillies a partir d'un groupe relativement restreint d'experts et analyse par les statistiques. L'analyse qualitative de mouvement d'approche doit etre basee sur l'intelligence (ou de l'equipement), qui est capable de reconnaitre les aspects importants du mouvement. Conclusions subjectives basees sur exactement ce type d'analyse peuvent etre acceptees ou rejetees sur la base des donnees quantitatives obtenues dans l'avenir.
Approche quantitative, a son tour, est une valeur numerique sur la base des donnees de mouvement obtenues lors de l'analyse des donnees experimentales. Cette approche peut refuter opinions subjectives decrites precedemment, ainsi que les donnees peuvent decrire ou d'expliquer la situation physique du systeme.
3.Les particularites d’emplacement des accelerometres pour mesurer le mouvement humain
L'emplacement ou l'accelerometre est place sur le corps est un facteur important pour mesurer le mouvement du corps. L'accelerometre est generalement appose sur le corps, dont le mouvement est a l'etude. Par exemple, les accelerometres attaches a la cheville et de la jambe sont utilisees pour etudier le mouvement des jambes pendant la marche, et accelerometres attaches au poignet – utilises dans l'etude de tremblements de Parkinson. Dans de nombreux cas ou il est necessaire d'examiner le "corps" de la circulation, pour l'emplacement de l'accelerometre de choisir un lieu aussi proche que possible du centre de masse du corps tel que la poitrine ou le tour de taille.
Un aspect important est l'emplacement exact de l'accelerometre orientation relative des corps dans l'espace, car meme si ils sont places nanekotorye difficile parties ( presque statiques) du corps, il peut affecter de maniere significative la precision des mesures.
Il est necessaire de tenir compte des caracteristiques telles que, par exemple, si un capteur est fixe qui est trop proche du centre de rotation, l'amplitude resultante du signal de mesure peut etre affaiblie. En outre, si ispolzovatdlya pied auxiliaires (canne ou un cadre Zimmer / marcheur), ils peuvent influencer de maniere significative la nature des signaux mesures. Cela peut entrainer l'extinction de l'amplitude etape de mesure de signal, et pour augmenter les mouvements d'oscillation du mouvement de temps [3].
4. Les dispositifs pour creation d’un systeme et des experiences possibles
Pour la recherche a ete prise ADXL345 accelerometre numerique, qui est un systeme de mesure de l'acceleration a trois axes avec plage de mesure selectionnable ou ± 2g, ± 4g, ± 8g, ou ± 16g. Il mesure la fois l'acceleration dynamique resultant du mouvement ou de choc et de l'acceleration statique, par exemple la gravite, il peut etre utilise en tant que capteur d'inclinaison.
Le detecteur est une structure de micro-usine polysilicique de surface construit sur le dessus d'une plaquette de silicium. Structure de polysilicium suspendue a une surface de la plaque de ressort et de fournir une resistance contre les forces d'acceleration [3].
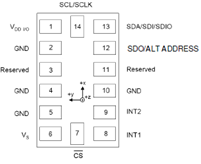
image 9 – Configuration des broches.
| Pin № | Le nom (abreviation) | La description |
|---|---|---|
| 1 | VDD I/O | Systeme numerique de tension la Description |
| 2 | GND | Doit etre relie a la terre |
| 3 | Reserved | Connecte a VS ou reste ouvert |
| 4 | GND | Doit etre relie a la terre |
| 5 | GND | Doit etre relie a la terre |
| 6 | VS | tension |
| 7 | CS | Le signal du choix du puce |
| 8 | INT1 | La sortie de l'interruption 1 |
| 9 | INT2 | La sortie de l'interruption 2 |
| 10 | GND | Doit etre relie a la terre |
| 11 | Reserved | Connecte a GND ou reste ouvert |
| 12 | SDO/ALT ADDRESS | La sortie successif des donnes, on remplace I2C Address Select |
| 13 | SDA/SDI/SDIO | Serial Data In (SPI 4-Wire), Serial Data In/Out (SPI 3-Wire) |
| 14 | SCL/SCLK | Le signal de la synchronisation |
Afin d'obtenir un systeme il faut tenir compte de plusieurs caracteristiques du systeme, qui seront discutees ci-apres. Il est egalement souhaitable de pouvoir classer un etalonnage du logiciel de l'accelerometre, en tant que etalonnage d'usine est souvent pas assez precis [5].
L'acceleration du systeme capteur ADXL345 – microcontroleur peut etre utilise pour mesurer le mouvement de n'importe quel segment du corps humain, il suffit de fixer le systeme dans le segment de test, en se concentrant accelerometres a son axe coincide avec l'axe de l'orientation des membres dans l'espace [4].
Le produit est une carte de circuit imprime pour les trois axes de gyroscope societe L3GD20 ST, qui mesure la rotation des axes X, Y, Z. La vitesse angulaire peut etre mesuree dans l'une des gammes de ± 250 ° / s, ± 500 ° / s, ou ± 2,000 ° / s. La valeur mesuree de la vitesse angulaire peut etre lu par l'intermediaire de l'I2C ou SPI [11].

image 10 – gyroscope L3GD20.
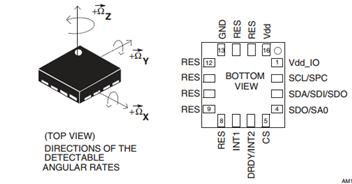
image 11 – Connexion des broches.
5.Les resultats des etudes experimentales
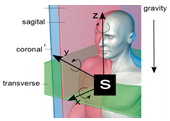
image 12 – Disposition des capteurs sur la poitrine.
image 13 – schematiquement debout et assis.
animation: 5 cadres, 5 cycles повторения, 8 kb.
image 14 – photo, debout et assis.
анимация: 5 cadres, 87 kb.
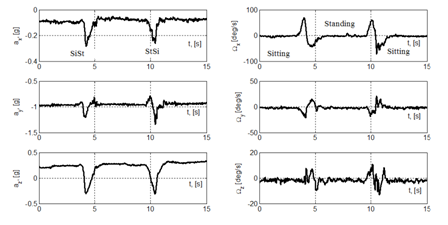
image 15 – debout et assis 1 fois.
Dans la tache de classification du reseau devrait inclure chaque cas a une ou plusieurs classes (ou dans le cas le plus general, la probabilite que le taux pour chaque observation des classes ). La classification peut etre effectuee en utilisant les types de reseaux suivants: Perceptron multicouche, les fonctions de base radiales, le reseau de Kohonen, reseau neuronal probabiliste et reseau lineaire, et ainsi de suite [10].
Pour la classification etaient trois positions: debout, couche couche sur le cote. Pour accomplir notre tache – de classer ces trois positions, nous avons realise les etapes suivantes:
- Le systeme consiste un micro-controleur qui recoit des informations provenant d'un capteur sur les trois axes, et effectue une transmission de donnees a l'ordinateur. L'ajout de l'operation.

image 16 – resultats
- Selon les donnees,on creer un script et les dependances de construction dans MATLAB
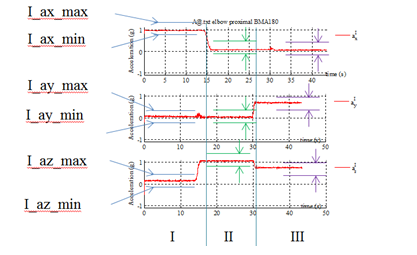
image 17 – resultats
Ce graphique montre trois action clairement separables et independants. Comme on le voit la premiere (I) a "stand" et a des valeurs X, pres de 1, Y=0, Z = 0, la seconde (II), ce «horizontale» avec X autour de 0, Y = 0 et Z sur la matiere approximativement egale troisieme = 1. Et (III) l'action est la position horizontale sur le cote droit.
Les fleches indiquent la gamme possible des ecarts dans le corps humain normal de position (a plat). Il est necessaire pour la classification correcte de positions et de la construction de regles logiques.
- Apres on organisent les regles logiques basees sur un logique boulienne.Et on obtenir les resultats suivants:
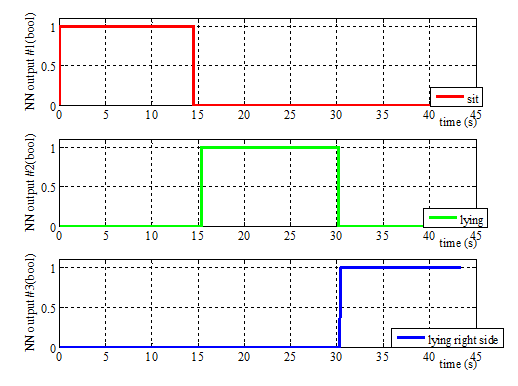
image 18 – resultats
- La prochaine etape est d'ecrire un programme utilisant un reseau de neurones a classer constante. Comme classificateur a ete choisi perceptron multicouche. Grace a notre ensemble de la formation que nous recevons.
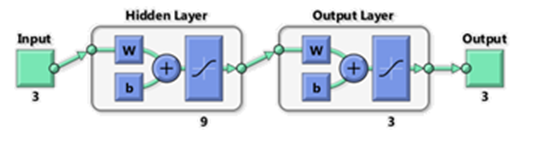
image 19 – resultas
Puis, apres avoir recu un programme de reseau neuronal, on creer une sortie simulink.A sortie de reseau de neurones, on obtient les donnees pertinentes.
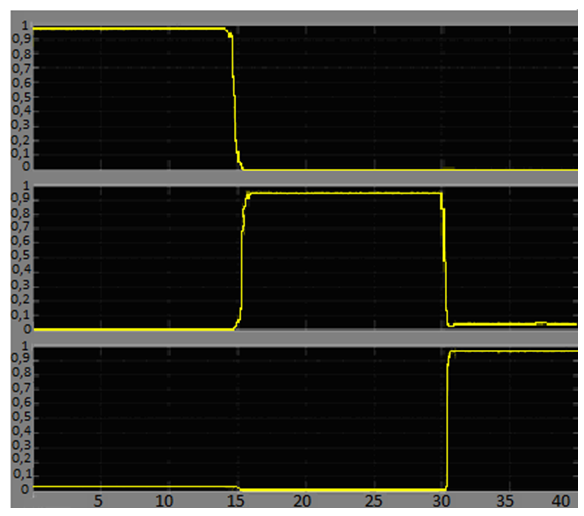
image 20 – Reponse du reseau de neurones. Le temps de l'axe Y, l'acceleration de l'axe X [g]
6. Conclusion
Le mouvement humain est un evenement neuro-musculaire importante neuro-musculaire, qui comprend mecanique, physiologique, anatomique, sociologique, l'environnement et les facteurs psychologiques. Physiologiques, anatomiques et mecaniques facteurs sous-jacents comprennent de nombreux aspects, tels que les plans de mouvement, cinematique, biomecanique, etc, qui doivent analyse minutieuse et une evaluation quantitative pour determiner les caracteristiques des mouvements du corps humain pour traiter efficacement.
Mesure a l’aide l’accelerometre s'est avere etre une methode appropriee et viable capable de determiner le mouvement des differents groupes.
Avec cette methode, la realisation plus facile de controle et de mesure en continu des mouvements humains en raison de ses exigences de faible puissance et de la taille miniature. Le principal avantage de cette methode est la possibilite de travailler en mode L'autonome lors du traitement de donnees en temps reel. En consequence, la mesure de parametres de mouvement base sur des capteurs inertiels permis de construire un systeme de surveillance que les methodes non intrusives ispolzuyutsravnitelno estimation de mouvement ambulatoire pose et la posture pendant la marche; la consommation d'energie, la vitesse et l'intensite du mouvement.
De tels systemes peuvent etre crees avec des fonctions speciales, calculees, par exemple, pour les personnes agees. Ces appareils sont plus sensibles au bruit et a la fluidite des mouvements, qui varient avec l'age.
D’autres recherches sont dirigees sur les points suivants:
- Analyse le volume requis de la litterature decrivant les systemes de surveillance existants de l'activite humaine.
- Dispositif pour l'enregistrement et la transmission de donnees pour le stockage et le traitement ulterieur.
- On passe une serie d'experiences dirige sur la mesure quantitative des parametres du mouvement des membres separes et le corps de la personne.
- On realise les programmes du traitement des signaux des detecteurs microelectromecaniques et le traitement statistique.
- L'algorithme base sur la multi-couche de neurones de formation par retropropagation de reseau pour la classification du signal.
Les etudes ulterieures sont dirigees sur les moments suivants:
- Travailler avec un suivi quotidien de l'activite humaine point important est une reconnaissance claire, la separation et la classification de toutes les positions possibles du corps humain. Par consequent, l'amelioration de l'algorithme de classification est le premier element dans des etudes ulterieures.
- Etude de toute activite humaine, y compris toutes les transitions posturales possibles, ainsi que les positions intermediaires razlichnyhe poste nestandarnye.
- Realistion des series d'experiences pour mesurer les parametres de mouvement pour les transitions posturales humaines communes, qui permettra de creer la base de connaissances developpe et tester un prototype.
- РElaborer des criteres de la trajectoire de l'objet biosimilaire qui sont obtenu a partir de l'information de capteur inertiel. Ce critere sera la base pour determiner la nature de l'objet en mouvement et la categorisation du mouvement Robot humanoide, mouvement humain.
Les problemes techniques qui ne sont pas scientifiques, mais il est necessaire de resoudre un certain nombre de questions techniques.
- Capteur d'acceleration triaxial permet d’observer une partie importante des activites quotidiennes. Cependant, si le reseau de capteur ou detecteur necessite a l'utilisation de plusieurs cables qui s'installent sur toute la longueur le corps, alors il empeche des mouvementsest (lie mouvement humain). Cette approche n'est pas pratique pour le suivi a long terme et l'utilisation commerciale. Par consequent, le developpement le plus efficace de ce domaine dans le sens de la vie de la batterie sans fil de l'augmentation de la duree et de la miniaturisation qui permetra a systeme d’etre encore plus parfait.
- L'augmentation de la vitesse de l'echange de donnees dans le systeme, le passage a une 32 bits architectures de microcontroleurs.
remarque
J'exprime ma gratitude a tous ceux qui ont participe a la redaction de ce travail et de recherche.
Au moment de la redaction de l`oeuvre de ce maitre de l'essai n'est pas encore terminee. Le fini de travail – Janvier 2015. Pour plus d'informations sur ces etudes peut etre obtenue aupres de l'auteur, et le texte complet des travaux et des materiaux – apres le fini de Master.
Bibliographie
- "Direct measurement of human movement by accelerometry", A. Godfrey, R. Conway a, D. Meagher, G. OLaighin; received 7 May 2008; received in revised form 25 September 2008; accepted 26 September 2008.
- "Triaxial Accelerometer Static Calibration", Kian Sek Tee, Member, IAENG, Mohammed Awad, Abbas Dehghani, David Moser, Saeed Zahedi; Proceedings of the World Congress on Engineering 2011 Vol III WCE 2011, July 6-8, 2011, London, U.K.
- "Datasheet ADXL345", 2008 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners.
- Kreshchak R and Melnyk A., Capteur porte pour etude de la dynamique des mouvements de l’etre humain. Сучасні проблеми систем електропостачання та побутових об'єктів. Збірник наукових праць I Міжнародної науково-технічної конференції викладачів, аспірантів і студентів: 17-18 жовтня 2013 р., м. Донецьк: "ДВНЗ" ДонНТУ, 2013. с. 105-106.
- Khomenko V., Melnyk A., Henaff P., Kuzmin G., Borysenko V., (2013), Experiments in measurement of rhythmical movements of anthropomorphic robots or humans. Travaux scientifiques de l’Universite technique nationale de Donetsk. Наукові праці Донецького національного технічного університету 1 (14), 2013. с. 287–292.
- B. Najafi, K. Aminian, F. Loew, Y. Blanc, and P. Robert “Measurement of stand-sit and sit-stand transitions using a miniature gyroscope and its application in fall risk evaluation in the elderly” IEEE Trans. Biomed. Eng., vol. 49, pp. 843–851 .
- Kinect for Widdows [электронный ресурс].- Режим доступа:http://www.microsoft.com/en-us/kinectforwindows/http://www.microsoft.com/en-us/kinectforwindows/
- Xsens [электронный ресурс].- Режим доступа:http://www.xsens.com
- Statsoft [электронный ресурс].- Режим доступа:http://www.statsoft.com/
- "Datasheet L3GD20", 2008 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners.