
Зміст
- Вступ
- 1. Cтан питання
- 2. Рухи Людини
- 3. Особливості розташування акселерометрів при вимірюванні рухи людини
- 4. Вибрані пристрої для створення системи і можливі експерименти
- 5. Результати експериментальних досліджень
- 6. Висновки
- Висновки
- Cписок джерел
Вступ
Фізична діяльність людини – одне з найскладніших і багатогранних явищ матеріального світу. Вона складна тому, що дуже непрості функції органів руху з позиції фізики. Вона багатогранна і тому, що в ній бере участь свідомість як продукт найбільш організованої матерії – мозку. У першу чергу мова йде про усвідомлену, цілеспрямованої активної діяльності людини, про розуміння її сенсу, про можливість контролювати і планомірно удосконалювати свої рухи. За допомогою рухової діяльності людина активно перетворює світ, свою власну природу, самовиражається у фізичному взаємодії з навколишнім світом, і в той же час фізично вдосконалюється. Через анатомічні особливості людського тіла, воно весь цей час перебуває під постійною увагою та є предметом дослідження багатьох науково -дослідних інститутів. Сьогодні проводяться багато анатомічні, фізіологічні, механічні, екологічні, соціологічні та психологічні дослідження, які покликані допомогти визначити ключові елементи і закони анатомічного функціонування людського тіла. Ці дослідження використовуються, в спробах створити сучасні методи для оцінки залежності рухи людини від численних можливих його захворювань.
1. Cтан питання
Рухливість і характер фізичної діяльності, виконуваної людиною протягом життя, роблять великий вплив на стан здоров'я, на фізичну функціональність, енергійність і життєву силу людини. Фізична активність істотно впливає на якість життя людини
На рівень физичес активності впливає багато факторів, наприклад такий фактор як соціальний можна вважати залежних від того, як людина взаємодіє зі своїм найближчим оточенням і іншою частиною спільноти. Середа, яка оточує його має великий вплив на те , яким чином людина виконує руху ( стиль, форма, кількість руху ). Наприклад, якщо це міський чи сільський житель, то живе він сам або в сім'ї; який тип роботи (важка або легка, сам або в колективі) і в якій кількості він виконує і т.д., все це може сприяти визначенню типу його ходи, виду траєкторії його переміщення.
Психологічні та емоційні фактори впливають на рух людини, відображаючи емоційний та психологічний стан кожного, наприклад, задоволеність життям або її відсутність, гарне добробут або відчуття його недостатності, впевненість в собі і т.п. при знаходженні в своєму оточенні.
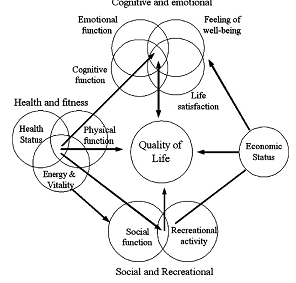
Рисунок 1 – Фактори, що впливають на якість життя та здоров'я людини [запозичене з Godfrey et al. (2008)]
Рисунок 1 є хорошим поданням впливу інтенсивності і типів руху на здоров'я людини і чому важливо підтримувати рухливий спосіб життя.
Як видно з рисунка, всі рухи взаємопов'язані і тому порушення від одного з них можуть призвести до ланцюгової реакції проблем (Рисунок 2).
Саме в зазначених областях функціонування людини йде комплексна робота вчених в інженерних, біологічних і психологічних сферах з метою отримання необхідних знань, в тому яким чином люди проводять свою повсякденну діяльність, і навичок, для контролю і підтримки здоров'я людини при виконанні ним цих заходів.
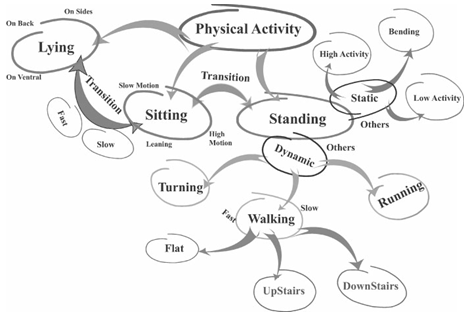
Рисунок 2 – Фізична діяльність людини[заимствовано из Godfrey et al.(2008)]
Одним із сучасних технічних методів є пряме вимірювання руху за допомогою акселерометра, який вперше був запропонований в 1970-х роках, але при цьому був досить вдосконалений тільки в останні 10–15 років.
Пряме вимірювання за допомогою акселерометра – це успішне введення в реалізацію приладу малої потужності з низькою вартістю датчиків, які можна масово використовувати в клінічних і домашніх умовах для постійного і безперервного моніторингу (контролю) пацієнтів на їх рухливості і типом рухів. Якісні іколічественние результати (дані), що надаються цими датчиками, дозволяють інженерам і лікарям працювати разом, щоб мати можливість максимально підвищити ефективність і швидкість надання допомоги своїм пацієнтам у подоланні їх недуг.
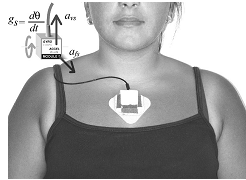
Рисунок 3.[заимствовано из Aminian et al.( 2003)]

Рисунок 4. [заимствовано из Aminian et al.(2004)]
Лідером у цій галузі кількісного вимірювання параметрів руху кінцівок і всього тіла є англійська фірма Vicon, яка випускає обладнання та спеціалізоване програмне забезпечення для маркерних оптичних тривимірних систем захоплення руху. Принцип дії системи заснований на поєднанні тривимірної візуалізації з методом кількісного аналізу ходи і електроміографією.
Технічною базою для роботи системи є інфрачервоні камери, які дозволяють записувати руху зі швидкістю 200 кадрів в секунду. Вони отримують інформацію від спеціальних світловідбивних датчиків маркерів, які в певній послідовності закріплюються на шкірі людини. Варто сказати, що кількість і місцерозташування цих маркерів відіграє істотну роль у проведенні самого дослідження [7].

Рисунок 5 – Vicon
Microsoft Kinect – технологія розпізнавання рухів людини, заснована на декількох камерах і лазері. Примітна тим, що для розпізнавання рухів потрібно лише увійти в зону видимості камер, ніяких додаткових контролерів брати в руки не потрібно. Деякий час тому Kinect поставлялася тільки у вигляді периферійного пристрою для приставки Microsoft Xbox 360, але зараз вже написаний SDK для використання комп'ютера, а Kinect потихеньку поступово задіюється в різних сферах діяльності людини, в першу чергу використовується в медицині та освіті.

Рисунок 6 – Microsoft Kinect
Компанія Xsens є постачальником систем 3D захоплення руху на основі мініатюрного MEMS датчика (інерціальна сенсорна технологія). Компанія створила комплексний продукт в області мульти-сенсорних систем захоплення руху. Продукт об'єднує алгоритми обробки даних, що надходять від надягають на тіло мереж датчікоа і безпосередньо самі інерціальні датчики в спеціальному виконанні Продукція Xsens широко використовується в області промисловості, розважальної індустрії, для навчання та симуляції, для задач біомеханіки.

Рисунок 7 – Xsens
2. Рухи Людини
Вивчення фізичних компонентів руху людини необхідно для повного розуміння фізіологічних процесів людини і прийняття правильного подальшого лікування хвороб і розладів, пов'язаних з рухом людини Аспекти рухи людини [1].
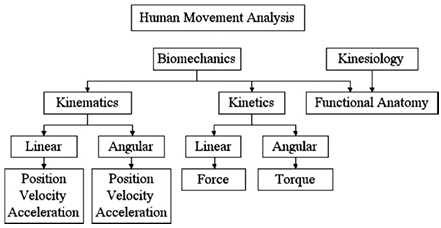
Рисунок 8 – Аспекти рухів людини.
Аналіз рухів людини проводиться в загальному в двох основних аспектах:
- Кінезіологічна аналіз
- біомеханічний аналіз
При вивченні різних аспектів руху зазвичай використовують два підходи: якісний і кількісний підходи.
Якісний підхід полягає в тому, що дані збираються з порівняно невеликої групи експертів і не аналізуються за допомогою статистики. Якісний підхід аналізу руху повинен грунтуватися на аналітиці ( або устаткування), яка здатна розпізнавати важливі аспекти руху. Суб'єктивні висновки, засновані саме цей на типі аналізу, можуть бути прийняті або відхилені на підставі кількісних даних отриманих в подальшому.
Кількісний підхід, у свою чергу, це числова оцінка руху на основі даних, отриманих під час аналізу експериментальних даних. Цей підхід може спростувати суб'єктивні думки, описані раніше, а також отримані дані можуть описати чи пояснити фізичну ситуацію системи.
3. Особливості розташування акселерометрів при вимірюванні рухи людини.
Місце, до якого акселерометр поміщають на тіло, є важливим фактором у вимірі руху тіла. Акселерометр зазвичай прикріплений до тієї частини тіла, рух якого вивчається. Наприклад, акселерометри, прикріплені до кісточки і гомілки, використовуються для вивчення руху ніг під час ходьби, а акселерометри прикріплені до зап'ястя – використовують при дослідженні Тремору Паркінсона. У багатьох випадках, коли необхідно вивчити "Все тіло" руху, для розташування акселерометра вибирають місце якомога ближче до центру маси тіла, наприклад, груди або талія.
Важливим аспектом є точне розташування акселерометра щодо системи орієнтації тіла в просторі, так як навіть якщо їх помістити надеякі жорсткі (майже статичні ) ділянки тіла це може значно вплинути на точність вимірювань.
Так само слід враховувати такі особливості як, наприклад, що якщо датчик прикріплений занадто близько до центру обертання, амплітуда результуючого вимірюваного сигналу може бути ослаблена. На додаток до цього, якщо іспользоватьдля ходьби допоміжні пристрої ( тростинний або Zimmer кадр / ходок ) вони можуть значно впливати на характер виміряних сигналів. Це може призвести до повного ослаблення амплітуди сигналу на етапі вимірювання, а також збільшити коливання рухів під времяамбулаторного руху.
4. Вибрані пристрої для створення системи і можливі експерименти
Для проведення досліджень було взято цифровий акселерометр ADXL345, який являє собою повну трехосевой систему вимірювання прискорення з обираним діапазоном вимірювання або ± 2g, ± 4g, ± 8g, або ± 16g. Він вимірює як динамічне прискорення в результаті руху або стрибка і статичного прискорення, наприклад, сили тяжіння, що дозволяє використовувати його в якості датчика нахилу.
ДДатчик являє собою полікремнієвих поверхню мікромеханічного структури, побудована на вершині кремнієвої пластини. Полікремнієві пружини призупиняють структуру на поверхні пластини і забезпечують стійкість проти сили прискорення.
Відхилення структури вимірюється за допомогою диференціальних конденсаторів, які складаються з незалежних фіксованих пластин і пластин, прикріплених до рухається масі. Прискорення відхиляє пучок і розбалансує диференційний конденсатор, в результаті чого отримуємо вихідний датчика, амплітуда якого пропорційна прискоренню. Також використовується фазочувствительного демодуляція для визначення величини і полярності прискорення.
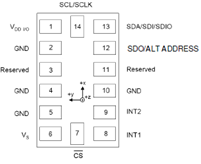
Рисунок 9 – Конфігурація виводів.
| Pin № | Назва (абревіатура) | Описание |
|---|---|---|
| 1 | VDD I/O | напруга живлення цифрової системи |
| 2 | GND | Повинен бути з'єднаний із землею |
| 3 | Reserved | Підключається до VS або залишається відкритим |
| 4 | GND | Повинен бути з'єднаний із землею |
| 5 | GND | Повинен бути з'єднаний із землею |
| 6 | VS | напруга живлення |
| 7 | CS | Сигнал вибору мікросхеми |
| 8 | INT1 | Вихід переривання 1 |
| 9 | INT2 | Вихід переривання 2 |
| 10 | GND | Повинен бути з'єднаний із землею |
| 11 | Reserved | Підключається до GND або залишається відкритим |
| 12 | SDO/ALT ADDRESS | Послідовний виxiд даних, замінює I2C Address Select |
| 13 | SDA/SDI/SDIO | Послідовної передачі даних (SPI 4-провідний), In / Out (SPI 3-Wire)) |
| 14 | SCL/SCLK | сигнал синхронізації |
Для того, щоб отримати систему, необхідно врахувати кілька особливостей системи, які будуть розглянуті далі. Також бажано програмно організувати калібрування акселерометра, тому що заводське калібрування часто буває не досить точною.
Систему датчик прискорення ADXL345 – Мікроконтролер можна використовувати для вимірювання руху будь-якого сегменту людського тіла, для цього достатньо закріпити систему в досліджуваному сегменті, орієнтуючи акселерометри, щоб його осі збігалися з осями системи орієнтування кінцівки в просторі.
Рисунок 9 – Конфігурація виводів (вид сверху).
Виріб являє собою друковану плату для 3-х осьового гіроскопа L3GD20 фірми ST, який вимірює обертання по осях X, Y, Z. Кутова швидкість може бути виміряна в будь-якому з діапазонів ± 250 ° / с, ± 500 ° / с, або ± 2000 ° / с. Виміряне значення кутової швидкості може бути прочитане через I2C або SPI інтерфейс.

Рисунок 10 – гироскоп L3GD20.
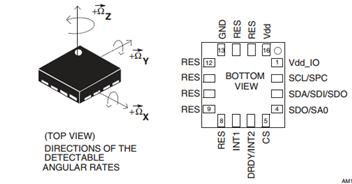
Рисунок 11 – Пін з'єднання.
5. Результати експериментальних досліджень
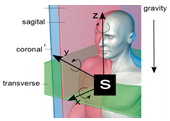
Рисунок 12 – Схема розташування датчиків на грудях.
Рисунок 13 – схематично вставання і посадка з датчиком на грудях.
анимація: 5 кадрів, 5 циклів повторения, 8килобайт.
Рисунок 14 – фото, вставання і посадка з датчиком на грудях
анимація: 5 кадров, 87 килобайт.
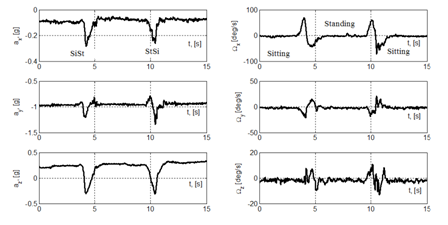
Рисунок 15 – Графік - вставання і посадка 1 раз
У задачі класифікації мережа повинна віднести кожне спостереження до одного з декількох класів (або, в більш загальному випадку, оцінити ймовірність приналежності спостереження до кожного з класів). Класифікацію можна здійснювати за допомогою мереж наступних типів: багатошарового персептрона, радіальної базисної функції, мережі Кохонена, ймовірнісної нейронної мережі і лінійної мережі і тд [10].
Для класифікації були вибрані три положення: стояти, лежати лежати на боці. Щоб виконати нашу поставлене завдання – класифікувати ці три положення ми виконали наступні дії:
- Система складається з мікроконтролера, який приймає інформацію від датчика по трьох осях і виконує передачу даних на комп'ютер. Додаючи час операції.

Рисунок 16 – Результати експериментальних досліджень
- Згідно з отриманими даними створюємо script і будуємо наступні залежності в пакеті прикладних програм МАТЛАБ:
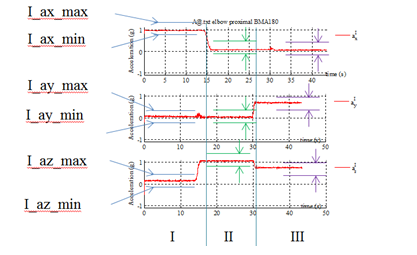
Рисунок 17 – Результати експериментальних досліджень
Це графік показує нам три незалежних і чітко разделімих дій. Як ми бачимо перші (I) положення "стояти" і має значення X, близьких до 1, Y = 0, Z = 0, другий (II), це "горизонтальне положення" з X близько 0, Y близько 0 і Z має значення приблизно рівні 1. И третя (III) дія це – горизонтальне положення на правій стороні.
Стрілками вказано можливий діапазон відхилення людського тіла в звичайних (рівних) положеннях. Він необхідний для правильної класифікації поз і побудові логічних правил.
- Далі організовуємо логічні правила засновані на булевої логіке. І отримуємо такі результати:
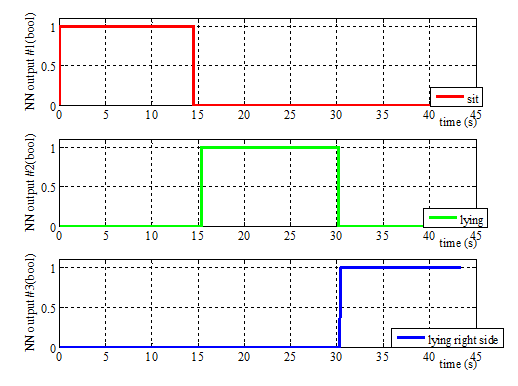
Рисунок 18 – Результати експериментальних досліджень
- Наступним кроком є написання програми з використанням нейронної мережі для класифікації. В якості класифікатора був обраний багатошаровий перцептрон. Використовуючи нашу навчальну вибірку отримуємо:
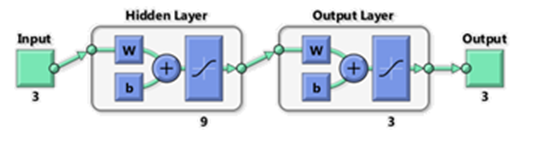
Рисунок 19 – Результати експериментальних досліджень
Далі після отримання нейронної мережі, створюємо програму в сімулінк. І на виході нейронної мережі отримуємо відповідні дані.
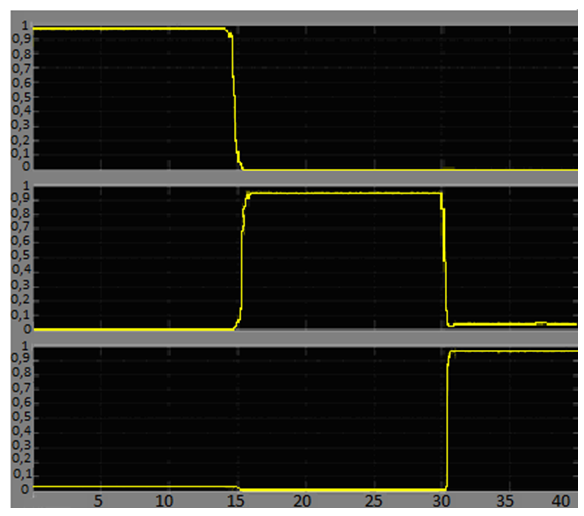
Рисунок 20 – Відповідь нейронної мережі. По осі У час, по осі Х прискорення [g]
6. Висновки
Движение человека является важным нейро-мышечным, скелетным событием, которое включает в себя механические, физиологические, анатомические, социологические, экологические и психологические факторы. Физиологические, механические и анатомические факторы, лежащие в основе, включают в себя многие аспекты, такие как плоскости движения, кинематика, биомеханика и т.д., которые нуждаются в тщательном анализе и получении количественной оценки для определения особенностей движения тела с целью эффективного лечения человека.
Измерение с помощью акселерометра зарекомендовало себя в качестве надлежащего и жизне способного метода определения движений различных групп.
С помощью этого метода более легкой реализация непрерывного измерения и контроля движения человека за счет его малой энергопотребности и миниатюрных габаритов.
Главным преимуществом такого метода является возможность работы в автономном режиме и при этом обработки данных в режиме реального времени. В результате этого, измерения параметров движения на базе инерциальных датчиков позволили построить системы мониторинга, которые используютсравнительно неинтрузивные методы амбулаторной оценки движения, поз и осанки при ходьбе; расхода энергии, скорости и интенсивности движения.
Подобные системы можно создавать со специальными функциями, рассчитанными, например, для пожилых людей. Такие приборы более восприимчивы к шуму и плавности движения, которые изменяются с возрастом.
До сьогодні, з числа запланованих досліджень, мною проведено:
- Проаналізовано необхідний обсяг літературних джерел з описом існуючих систем моніторингу активності людини.
- Розроблено пристрій для реєстрації та передачі даних для подальших збереження та обробки.
- Проведено ряд експериментів спрямований на кількісний вимір параметрів руху окремих кінцівок і тіла людини.
- Реалізовано програми обробки сигналів мікроелектромеханічних датчиків і статистичної обробки.
- Реалізовано алгоритм на базі багатошарової нейронної мережі з навчанням методом зворотного поширення помилки для класифікації сигналів.
Подальші дослідження спрямовані на наступні ключові моменти:
- У роботі з моніторингом денної активності людини важливим моментом є чітке розпізнавання, поділ і класифікація всіх можливих положень людського тіла. Тому вдосконалення алгоритму класифікації є першим пунктом у подальших дослідженнях.
- Вивчення всіх активностей людини, включаючи всі можливі постуральні переходи, проміжні позиції а також разлічнихе нестандарное становища.
- Проведення серії експериментів з вимірювання параметрів руху людини для поширених постуральних переходів, що дозволить створити статистичну бази і випробувати розроблений прототип.
- Розробка критерію біоподобні траєкторії руху об'єкта за отриманою з инерциального датчика інформації. Даний притерся буде покладено в основу виявлення природи рухомого об'єкту та класифікації по категоріях руху гуманоїдного робота, руху людини.
Технічні завдання не є науковими, проте необхідно вирішити ряд технічних питань.
- Трехосевой датчик прискорення дозволяє дослідник значну частину повсякденної діяльності. Однак якщо датчик або мережу датчиків вимагають використання численних кабелів, які располагаютсявдоль тіла, то таке носіння значно скорочує мобільність системи дослідження ( сковує рухи людини ). Цей підхід непрактичний для довгострокового моніторингу та комерційного використання. Тому найбільш ефективно розвивати цю сферу в напрямку бездротового зв'язку, підвищення тривалості автономної роботи і мініатюризації що дозволить зробити систему ще більш досконалою.
- Підвищення швидкості обміну даними в системі, перехід до 32бітним архитектурам мікроконтролерів.
Зауваження
Висловлюю величезну подяку всім, хто приймає участь у написанні даної роботи і проведенні досліджень.
На період написання даного реферату магістерська робота ще не завершена. Завершення роботи – січень 2015 року. Більш детальну інформацію за ціма дослідженнями можна отримати у автора, а повний текст і матеріали роботи – після завершення магістерської роботи.
Cписок джерел
- "Direct measurement of human movement by accelerometry" A. Godfrey, R. Conway a, D. Meagher, G. OLaighin; received 7 May 2008; received in revised form 25 September 2008; accepted 26 September 2008
- "Triaxial Accelerometer Static Calibration", Kian Sek Tee. Member, IAENG, Mohammed Awad, Abbas Dehghani, David Moser, Saeed Zahedi; Proceedings of the World Congress on Engineering 2011 Vol III WCE 2011, July 6 - 8, 2011, London, U.K.
- "Datasheet ADXL345", 2008 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners.
- Kreshchak R and Melnyk A., Capteur porte pour etude de la dynamique des mouvements de l’etre humain. Сучасні проблеми систем електропостачання та побутових об'єктів. Збірник наукових праць I Міжнародної науково-технічної конференції викладачів, аспірантів і студентів: 17-18 жовтня 2013 р., м. Донецьк: "ДВНЗ" ДонНТУ, 2013. С. 105-106.
- Khomenko V., Melnyk A., Henaff P., Kuzmin G., Borysenko V., (2013). Experiments in measurement of rhythmical movements of anthropomorphic robots or humans. Travaux scientifiques de l’Universite technique nationale de Donetsk. Наукові праці Донецького національного технічного університету 1 (14), 2013. 287–292.
- B. Najafi, K. Aminian, F. Loew, Y. Blanc, and P. Robert “Measurement of stand-sit and sit-stand transitions using a miniature gyroscope and its application in fall risk evaluation in the elderly” IEEE Trans. Biomed. Eng., vol. 49, pp. 843–851.
- Kinect for Widdows [электронный ресурс]. - Режим доступа:http://www.microsoft.com/en-us/kinectforwindows/http://www.microsoft.com/en-us/kinectforwindows/
- Xsens [электронный ресурс].- Режим доступа:http://www.xsens.com
- Statsoft [электронный ресурс]. - Режим доступа:http://www.statsoft.com/
- «Datasheet L3GD20», 2008 Analog Devices, Inc. All rights reserved. Trademarks and registered trademarks are the property of their respective owners.