
Реферат по теме выпускной работы
Содержание
- Введение
- Обзор исследований и разработок
- 1. Цели и задачи исследования
- 2. Основные вопросы, которые должны быть разрешены в данной работе
- 3. Структура стенда для исследования цифровых систем
- 4. Обзор элементов силовой части стенда
- 4.1 Двигатель постоянного тока
- 4.2 Тормозные режимы ДПТ
- 4.3 Тиристорный преобразователь как элемент СУЭП
- 4.4 Особенности реверсивных тиристорных преобразователей
- 5. Системы управления
- 5.1 Система подчинённого регулирования
- 5.2 Цифровая система управления с использованием РС
- 5.3 Цифровая система управления ABB DCS 800
- Вывод
- Список источников
Введение
В современно мире неотъемлемой частью стали цифровые системы управления. На данном этапе развития они активно развиваются в области автоматизации и систем управления промышленными технологическими объектами. Без них сейчас сложно представить точную, энергоэффективную, качественную и безопасную работу различных промышленных объектов. Для расширения знаний и повышения знаний студентов требуется разработка экспериментального стенда для изучения таких систем
Обзор исследований и разработок
Из-за того, что в настоящее время сложность систем (алгоритмы) управления возросла, следовательно, создание экспериментальной установки для проверки алгоритма управления усложняется. В большинстве случаев, в работах об исследовании той или иной системы представляют только результаты математического моделирования. Математическое моделирование дает нам возможность, не имея физического объекта изучить его свойства, что является первым и важным шагом для дальнейшего изучения, однако экспериментальная установка с использованием физической модели является основным этапом в проектировании новых алгоритмов и систем управления. Позволяет выявить некоторые особенности, которые при математическом моделировании не ощутимы, но могут оказать большое влияние на качество управления.
В последние годы в сфере информационных технологий стал проявляться интерес к понятию как «Виртуальная учебная лаборатория» (ВУЛ) применительно к технической сфере.
Термин ВУЛ можно применить к современным способам исследования процессов, которые протекают в ЭМС на основе математического описания и основанной на ней модели. Математическое моделирование как правило выполняется с использованием прикладных програм. Среди иностранных фирм лидирующие позиции в разработке прикладных программ занимают такие компании как MathWorks, MicroSim, Cadence Design Systems, Interactive Image Technologies, National Instruments, Spectrum Software, MathSoft, Wolfram Research. При разработке стендов для взаимодействия матемтиеской модели и физической в основной массе используют MATLAB, Mathcad, LabVIEW. Каждый пакет отличается друг от друга по своей структуре и математическими возможностями.
На кафедрах электропривода на территории Украины были созданы лабораторные экспериментальные установки, которые могут совмещать исследования объекта, как на уровне моделирования, так и на уровне физического эксперимента. В этих работах [2 - 6] был разработан комплекс различных мероприятий:
- Проверка аналитических методов, на экспериментальной установке, позволяющей реализовать цифровую систему управления положением электропривода постоянного тока в реальном времени [6]
- Использование станции быстрого моделирования, которая позволяет произвести моделирование с использованием виртуального объекта управления, т. е. алгоритм управления отрабатывается не на реальной установке, а на внутренней модели (двигателя, преобразователя) [2]
- Реализация, апробирования и исследования новых алгоритмов идентификации, управления и наблюдения различных электромеханических систем со сложными параметрическими и функционально неопределёнными объектами [3]
- Реализация в установке «механизма» имитации различных технологических процессов [4]
- Использование комплектных электроприводов с расширением и усложнением типовых систем, которые были заложены производителем с применением дополнительных модулей [3]
- Возможность имитации нормальных, предаварийных и аварийных режимов работы [5]
- Наблюдение за состоянием системы в целом так и за отдельными ее элементами [3, 5]
Алгоритмы управления становятся унифицированными и разница между настройками привода постоянного и переменного тока уже не такие существенные, как были до реализации систем управления в цифровом виде.
У реализованных проектов есть свои достоинства и недостатки. Исходя из опыта создания различных экспериментальных установок в разных ВУЗах страны, учитывая все достоинства и недостатки, ведется разработка лабораторного стенда для исследования различных цифровых систем автоматического управления на базе электропривода постоянного тока в реальном времени с возможностью управления от различных программируемых комплексов.
1. Цели и задачи исследования
Цель – создания лабораторного стенда для исследования различных цифровых систем автоматического управления на базе электропривода постоянного тока в реальном времени с возможностью управления от различных программируемых комплексов с использованием многообразных видов преобразовательной техники. Исследование должны производиться во взаимосвязи с видоизмененными схемами и режимами работы электропривода, а так же с использованием новейшей преобразовательной техники.
2. Основные вопросы, которые должны быть разрешены в данной работе:
- Анализ существующих решений в области систем управления и преобразовательной техники
- Создания собственного лабораторного стенда для научных и практических исследований
- Демонстрация возможных методов изменения структуры системы и алгоритмов управления комплектным электроприводом
- Разработка системы автоматического регулирования электроприводом в реальном времени с применением цифровых систем
- Моделирование процессов в созданной системе регулирования
3. Структура стенда для исследования цифровых систем
Лабораторный стенд объединяет в себе следующие компоненты: два двигателя постоянного тока, два комплектных тиристорных преобразователя (2х квадрантных) ABB DCS 800, с возможностью управления по промышленному сетевому протоколу Profibus-DP; два преобразователя серии БТУ (4х квадрантных), с возможно управления как от цифровых систем управления, так и от аналоговых схем; компьютер типа PC с использованием высокоскоростной PC совместимой платой расширения АЦП/ЦАП 5710-1 Octagon systems, а так же компьютер для возможной более точной настройки комплектного преобразователя DCS 800; два тахогенератора для измерения скорости вращения; гальванические развязки; стрелочные приборы на панели для измерения и регуляторы напряжения; Vipa Speed 7 – 314ST
Рисунок 1 – Принципиальная схема стенда
(анимация: 6 кадров, 7 циклов повторения, 260 килобайт)

Рисунок 2 – Внешний вид комплектного преобразователя ABB DCS 800
4. Обзор элементов силовой части стенда
4.1 Двигатель постоянного тока
Машина постоянного тока – электрическая машина, предназначенная для преобразования электрической энергии постоянного тока в механическую энергию (двигатель) или для обратного преобразования (генератор).
Принцип действия. Машина постоянного тока имеет обмотку возбуждения, расположенную на явно выраженных полюсах. По обмотке протекает постоянный ток (ток возбуждения), создающий магнитное поле возбуждения. На роторе расположена двухслойная обмотка, в которой при вращении ротора индуцируется переменная ЭДС. С помощью механического преобразователя энергии – коллектора, эта ЭДС выпрямляется. При заданном направлении вращения якоря направление ЭДС, индуцируемой в его проводниках зависит от того, под каким полюсом находится проводник, поэтому во всех проводниках, расположенных под одним полюсом, направление ЭДС одинаково и сохраняется таким независимо от частоты вращения.
Конструктивно машина постоянного тока состоит из статора (на котором находится обмотка возбуждения), ротора (якоря) и щеточно-коллекторного аппарата (преобразовании переменной ЭДС в постоянное напряжение или наоборот).
По способу электрического соединения обмоток двигатели постоянного тока бывают независимого, параллельного, последовательного и смешанного возбуждения. Способ соединения обмоток влияет на вид статических и динамических характеристик.
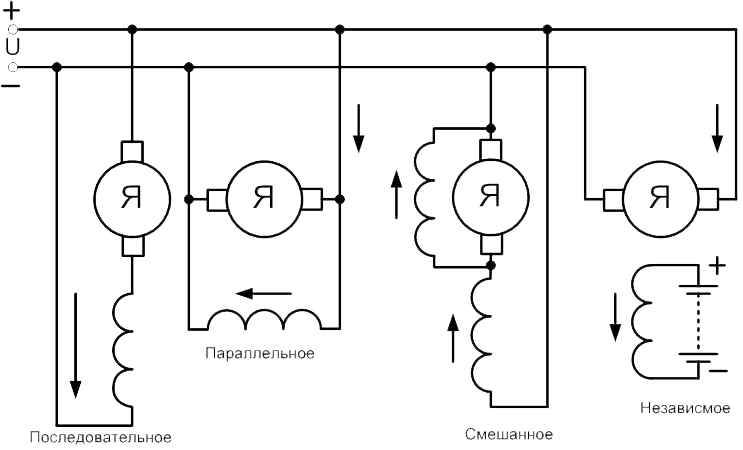
Рисунок 3 – Cхемы соединения обмоток ДПТ
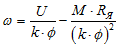
Наибольшее распространение получили ДПТ с независимым возбуждением. Отличительной их чертой является возможность раздельного управления тока якоря (управление в первой зоне, ниже скорости холостого хода) и магнитного потока (во второй зоне, выше скорости холостого хода). Используя уравнение якорной цепи, выразив из него ЭДС и разделив на произведение магнитного потока и конструктивной постоянной, получим уравнение механической статической характеристики:
Из него хорошо видно, что скорость двигателя можно изменить тремя способами – изменением напряжения якоря, изменением магнитного потока, введением добавочных сопротивлений. Регулирование с помощью введения добавочных сопротивлений крайне неэффективно, ввиду уменьшения КПД и необходимости в мощных резисторах, требующих хорошего охлаждения. Поэтому данный способ регулирования рассмотрен не будет. При этом можно заметить, что характеристики полученные ослаблением поля имеют различную жёсткость, которая меньше чем у естественной механической характеристики.
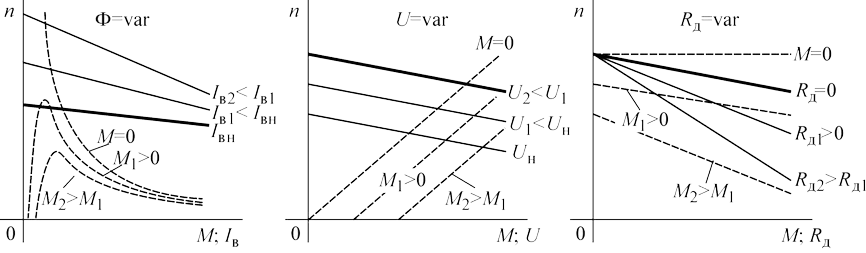
Рисунок 4 – Регулирование скорости двигателя постоянного тока
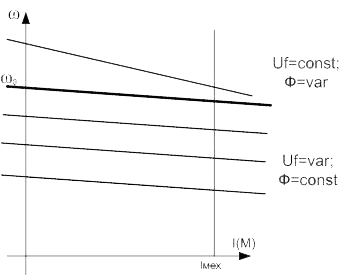
Рисунок 5 – Регулирования скорости в первой и второй зонах
Машина постоянного тока может работать как в двигательном (скорость двигателя ниже скорости холостого хода), так и в генераторном (выше скорости холостого хода) режиме, отдавая энергию в сеть.Реверс осуществляется либо изменением направления тока якоря, либо изменением направления тока возбуждения.
4.2 Тормозные режимы ДПТ
Торможение можно осуществлять следующими способами:
- Генераторное торможение
- Торможение противовключением
- Динамическое торможение
Генераторное торможение (рекуперативное) – такое торможение применяется при переходе на более низкую скорость. При понижении напряжения скорость и соответственно ЭДС не могут мгновенно измениться, это приводит к тому, что ток меняет направление и начинает протекать от двигателя к источнику напряжения.
Торможение противовключением производится путём переключения полярности напряжения якоря и введением в его цепь добавочного сопротивления. Необходимо обесточить двигатель и, в зависимости от того какой момент нагрузки приложен, наложить механический тормоз.
Динамическое торможение осуществляется замыканием якоря двигателя на добавочное сопротивление. При активном моменте нагрузки необходимо также наложить механический тормоз при нулевой скорости.
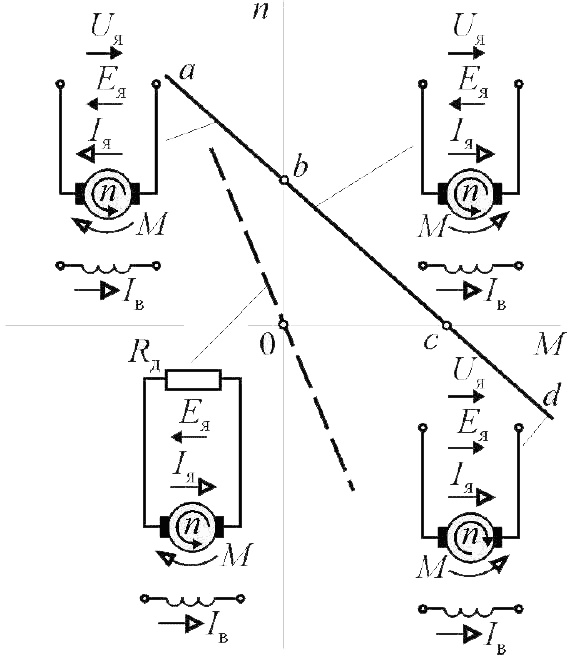
Рисунок 6 – Режимы торможения (ab – генераторное торможение, cd – противовключение, пунктир – динамическое)
4.3 Тиристорный преобразователь как элемент СУЭП
В структуру современных ТП входят следующие элементы:
- Трансформатор или токоограничивающий реактор. Трансформатор служит для согласования по напряжению двигателя с сетью, реактор – для ограничения скорости нарастания прямого тока через тиристор.
- Силовая схема ТП, обеспечивающий преобразование рода тока из одного вида в другой.
- СИФУ, которая обеспечивает преобразование непрерывного входного сигнала Uу, получаемого из системы регулирования, в последовательность управляющих импульсов на тиристоры.
- Коммутационная и защитная аппаратура (устройство управления и защиты УУЗ), обеспечивающая подключение преобразователя к сети и к нагрузке, отключение ТП от сети и аварийное торможение двигателя, а также различные защиты двигателя.
- Кроме того, в состав тиристорного преобразователя может входить сглаживающий реактор (дроссель), предназначенный для улучшения формы выпрямленного тока и ограничения зоны прерывистых токов.
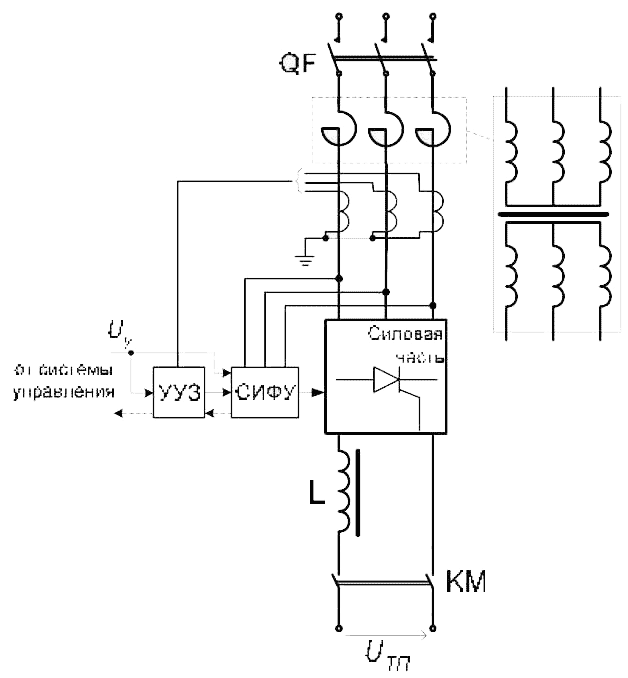
Рисунок 7 – Упрощенная функциональная схема ТП
Основным звеном ТП является силовая схема. Силовые схемы ТП делятся на нулевые и мостовые. Основным типом схем в ЭП постоянного тока является мостовая схема. Нулевые схемы применяются достаточно редко – для питания маломощных двигателей и цепей возбуждения. Наиболее распространенные трехфазные нереверсивные схемы.
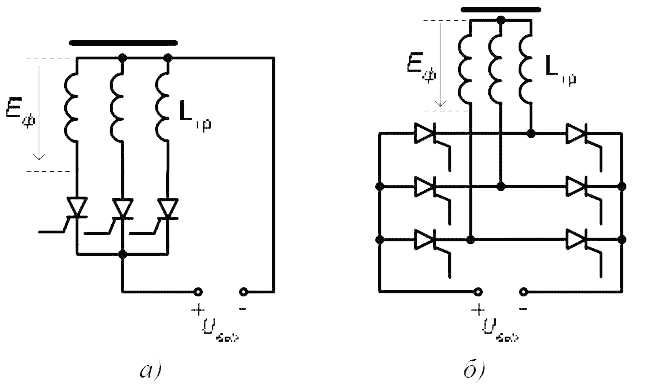
Рисунок 8 – Силовые схемы трехфазных нереверсивных ТП: а – нулевая; б – мостовая.
Важными показателями силовых схем ТП являются:
- пульсность выпрямленного напряжения m, равная числу фаз ТП (для трехфазной мостовой схемы m=6, для трехфазной нулевой m=3);
- коэффициент схемы – отношение максимальной выпрямленной ЭДС Ed0 к действующему значению Eф фазной ЭДС сети, питающей ТП (если ТП подключается к сети через трансформатор, то в качестве напряжения сети рассматривается ЭДС вторичной (вентильной) обмотки трансформатора):
Числ. значения: kcx=2,34 – для мостовой схемы, kcx=1,17 – для нулевой.
4.4 Особенности реверсивных тиристорных преобразователей
Изменение полярности напряжения, прикладываемого к двигателю, влечет за собой соответствующее изменение направления протекания тока. Поскольку тиристор имеет однополярную проводимость, реверсирование тока можно осуществить:
- с помощью контакторного реверсора (применяется для малоответственных приводов малой мощности)
- с помощью установки двух комплектов тиристоров, каждый из которых питает нагрузку током противоположной полярности
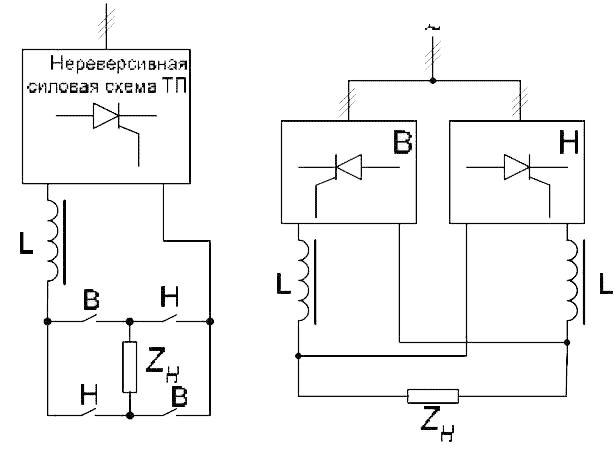
Рисунок 9 – Реверсивные схемы
При реализации второго способа возможны две схемы – перекрестная и встречно-параллельная.
Встречно-параллельная схема нашла наибольшее распространение в реверсивных тиристорных ЭП постоянного тока, поскольку обусловливает меньшую установленную мощность ТП и лучшие массогабаритные показатели.
По способу управления различают реверсивные ТП с раздельным и совместным управлением.
В настоящее время совместное управление группами ТП используется в относительно редких случаях реализации специальных ЭП, режимы работы которых связаны с протеканием малых токов и частым изменением полярности тока. При совместном управлении две СИФУ (для каждой группы) осуществляют сдвиг управляющих импульсов в противоположных направлениях, причем импульсы подаются непрерывно на тиристоры обеих групп. Одна группа работает в выпрямительном режиме (α<90°), а другая – в инверторном (β<90°). Проводящее состояние групп вентилей и направление тока нагрузки определяется соотношением ЭДС преобразователей и нагрузки.
Недостатки совместного управления:
- из-за протекания уравнительного тока имеет место дополнительная токовая загрузка ТП и сети, увеличиваются потери, уменьшаются к.п.д. и коэффициент мощности ТП;
- возможно возникновение к.з. между комплектами вентилей;
- необходимость использования более дорогих трансформаторов с двумя вторичными обмотками и уравнительных реакторов.
Все современные серийные ТП выпускаются с раздельным управлением, при котором отпирающие импульсы подаются на тиристоры только одной группы, а импульсы второй при этом заблокированы. Переключение групп возможно только по сигналу из системы регулирования при нуле тока в цепи нагрузки. Сигнал на переключение групп вентилей вырабатывается с помощью логического переключающего устройства (ЛПУ).
Устройство ЛПУ формирует логические сигналы на работу тиристорных групп в зависимости от сигнала i0, поступающего от датчика нулевого тока (ДНТ), а также логического сигнала требуемого направления тока is, получаемого из системы регулирования (указывает, какая именно группа должна работать).
При переключении групп стремятся обеспечить, чтобы ЭДС включаемой группы была бы равна ЭДС отключаемой группы, – при этом условии будет отсутствовать бросок тока при переключении и ускорится процесс спадания тока. Для этой цели чаще всего используют переключатель характеристик (ПХ), который одновременно с переключением групп изменяет полярность сигнала Uy на противоположную.
При возникновении аварийной ситуации СИФУ вырабатывает логический сигнал uсз селективной защиты, который блокирует подачу импульсов на тиристоры обеих групп
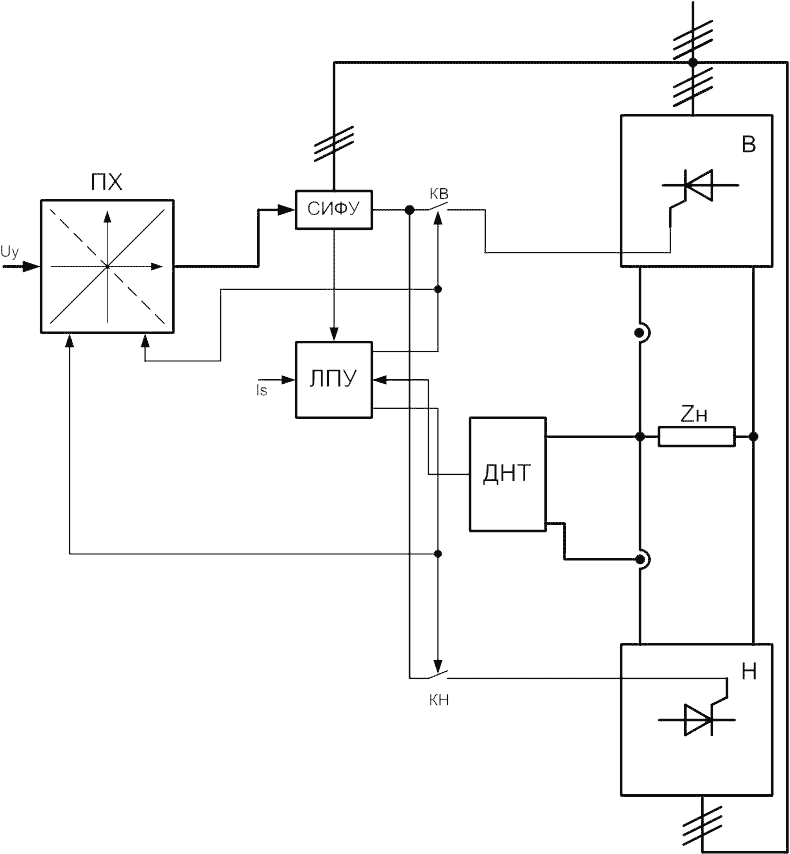
Рисунок 10 – Функциональная схема ТП с раздельным управлением.
5. Системы управления
5.1 Система подчинённого регулирования
Как видно из статических механических характеристик, с ростом момента угловая скорость уменьшается, что недопустимо в устройствах, где необходимо точное регулирование скорости и обеспечение одинакового момента на разных скоростях. Для этих целей применяют замкнутые системы регулирования с обратной связью по скорости или ЭДС/напряжению, которые компенсируют просадку по скорости путём поднятия напряжения якоря или ослабления магнитного поля, в зависимости от зоны регулирования.
Регулирование угловой скорости по цепи якоря. Запишем уравнение якорной цепи, уравнение момента, ЭДС а также второй закон Ньютона для вращательного движения, и, перейдя в операторную форму записи, найдём передаточные функции и составим структурную схему.
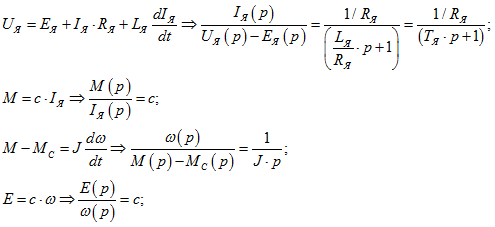
Рассчитывая регуляторы тока и скорости, пренебрегаем влиянием противо-ЭДС, считая его незначительным.
Суть настройки – реализация регулятора с ПФ обратной произведению ПФ прямой ветви и ветви ОС контура регулирования.
Для контура тока:

Но так как инерционность преобразователя невозможно скомпенсировать, мы её исключаем из синтеза. Так как в контуре тока присутствует возмущение, а его необходимо выполнить астатическим, следовательно, регулятор тока должен быть ПИ типа, но, исходя из выше сказанного, получаем ПД ПФ.
Умножив полученную ПФ на интегратор с постоянной времени Tm получим искомую ПФ:
Передаточная функция всего контура тока:
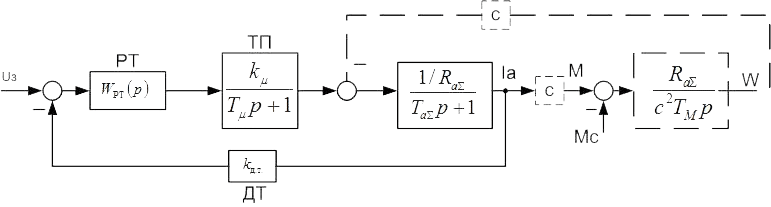
Рисунок 11 – Структурная схема контура регулирования тока
Аналогично выполняется настройка контура регулирования скорости. В итоге получаем ПФ регулятора скорости и структурную схему всей системы целиком:
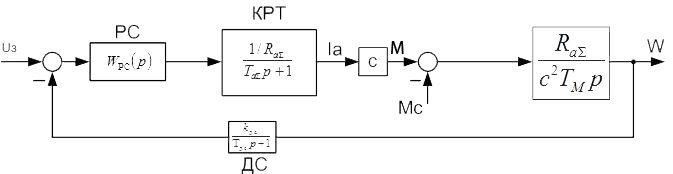
Рисунок 12 – Структурная схема контура регулирования скорости
5.2 Цифровая система управления с использованием РС
Современные системы управления электродвигателями строятся с использованием цифровой техники. В последние годы широкое распространение во всех отраслях промышленности получили микропроцессоры для цифровой обработки сигналов – DSP (Digital Signal Processors).
Основным отличием DSP от обычного процессора является высокая скорость выполнения операций типа X=AB+C (за один такт). Как известно, алгоритм управления электрическим двигателем преимущественно состоит из арифметических операций умножения и сложения, а следовательно применение DSP в системах управления электроприводами крайне целесообразно. DSP содержат в своей структуре помимо стандартных для любого микропроцессора блоков (АЛУ, ППЗУ, контроллеры прерываний, и пр.) блоки, обеспечивающие управление силовым преобразователем (ШИМ модулятор), сбор информации о состоянии системы (АЦП, Encoder), и т. д.
Цифровой контроллер должен обладать требуемой вычислительной мощностью для расчета и выдачи сигналов управления, а также иметь необходимый интерфейс для управления системой в реальном масштабе времени.
Для построения собственной цифровой системы управления используем компьютер типа PC с использованием высокоскоростной PC совместимой платой расширения АЦП/ЦАП 5710 Octagon systems.
Octagon 5710 представляет собой плату АЦП с высоким разрешением, на которой также содержатся устройства ввода/вывода дискретных сигналов.
Аналоговая часть платы позволяет производить измерения с частотой 70000 измерений в секунду. Инициализация преобразователя осуществляется либо под управлением платы вычислителя (процессорной платы) либо при помощи расположенного на плате 5710 счетчика/таймера. Счетчик/таймер может быть использован для выполнения временных измерений общего назначения либо для генерации ШИМ-сигнала.
К плате 5710 могут быть подключены 16 униполярных или 8 дифференциальных аналоговых сигналов. Разрешающая способность АЦП составляет 12 разрядов проивходном сигнале (-5..+5) В. Переключение каналов осуществляется программным способом. Допускается подавать на входы сигналы напряжением до (-15...+ 15) В при отсутствии на плате напряжения питания. На плате также имеются 2 аналоговых выходных канала. Выходной сигнал также задается перемычками и может быть (0..5) В, (+-10) В или (+-5) В. Плата 5710 позволяет работать с 19 дискретными линиями ввода/вывода.

Рисунок 13 – Внешний вид платы 5710 Octagon systems
Для системы управления будут использоваться как аналоговые входы/выходы, так и цифровые. Аналоговые для считывания координат которые изменяются в течении времени (такие как: ток Ia, ток Iв, скорость вращения двигателя), а так же дискретные для предусмотрения различных защит.
Система управления создана на основе систем подчиненного регулирования и выполнена в пакете MATLAB с использованием Simulink, преобразована для использования в среде QNX, где предусмотрена редактирование и запись интересующих нас параметров исследуемого объекта. QNX операционной системы реального времени. Выделяется наиболее полным набором инструментальных средств, к которым пользователь привык в DOS или UNIX, обеспечивает все неотъемлемые составляющие системы реального времени: многозадачность, диспетчеризацию программ на основе приоритетов и быстрое переключение контекста.
Период дискретности цифровой управляющей машины составляет 0,5 мс. Кроме функции управления на систему возложены еще и функции визуализации с возможностью оперативного управления системой с клавиатуры компьютера. Регистрация необходимых сигналов (как внутренних, так и внешних сигналов системы) осуществляется с частотой 2кГц.
5.3 Цифровая система управления ABB DCS 800
Преобразователь ABB DCS 800 является комплектным. Комплектный электропривод – это электропривод, укомплектованный на заводе-изготовителе всеми узлами, необходимыми для его функционирования.
При использовании данного преобразователя нам дается возможность параметрирования различных параметров (доступно около 1000) для повешения его энергоэффективности и качества требуемых характеристик.
Пример влияния различных параметров на управления скоростью:
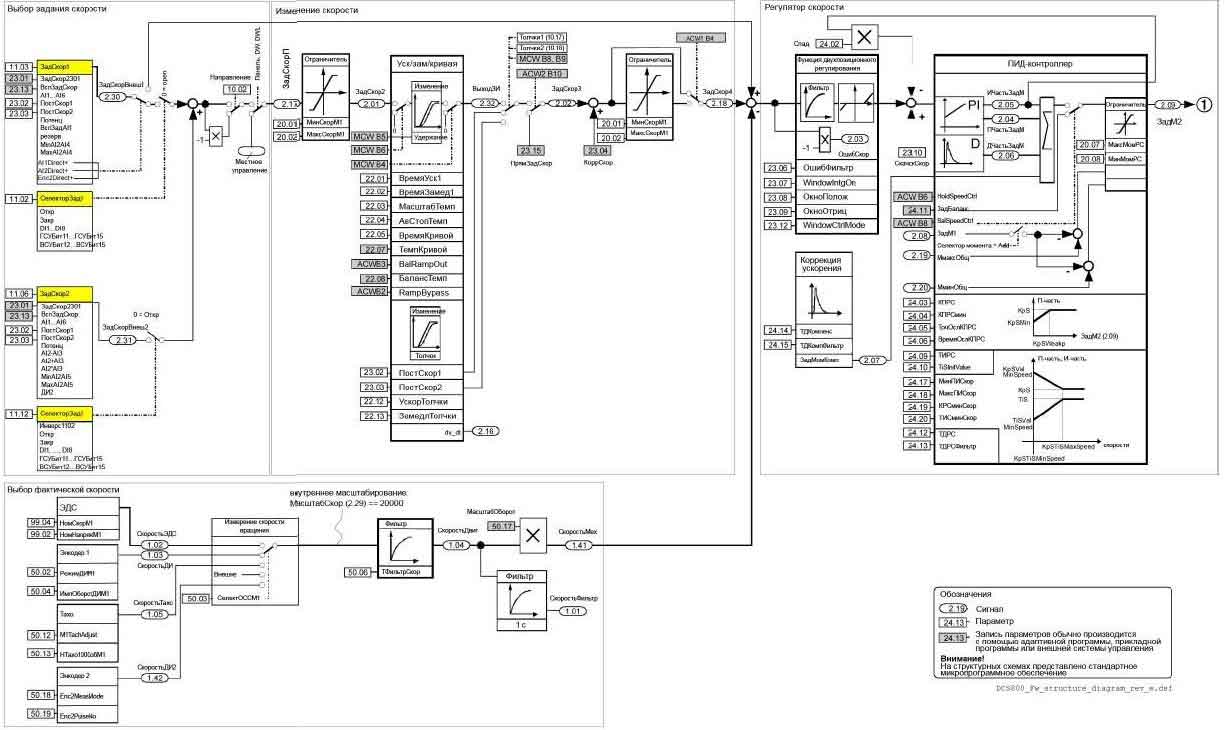
Рисунок 14 – Блок схема управления скоростью двигателя
Есть различные варианты управления DCS 800 и настройки:
- Управление и параметрирование с помощью передней панели
- Управление и мониторинг с использованием высокоскоростной платы АЦП/ЦАП 5710
- Управление, параметрирование и мониторинг с использованием программного обеспечения Drivewindow 2
- Управление с использованием пакета для промышленной автоматизации CoDeSys
- Управление с использованием промышленных сетей типа Profibus-DP и ПЛК серии 300 (Siemens или Vipa)
Для стенда будет применено помимо, управления и мониторинга с использованием высокоскоростной платы АЦП/ЦАП 5710 и параметрирования и мониторинга с использованием программного обеспечения Drivewindow 2, использования промышленного протокола передачи информации типа Profibus-DP
Profibus DP (Decentralized Peripheral — Распределенная периферия) — протокол, ориентированный на обеспечение скоростного обмена данными между:
- системами автоматизации (ведущими DP-устройствами)
- устройствами распределённого ввода-вывода (ведомыми DP-устройствами)
Протокол характеризуется минимальным временем реакции и высокой стойкостью к воздействию внешних электромагнитных полей. Оптимизирован для высокоскоростных и недорогих систем. Эта версия сети была спроектирована специально для связи между автоматизированными системами управления и распределенной периферией.
Сеть Profibus состоит из ведущих (англ. master) и ведомых (англ. slave) станций. Ведущая станция может контролировать шину, то есть может передавать сообщения (без удалённых запросов), когда она имеет право на это (то есть когда у неё есть маркер). Ведомая станция может лишь распознавать полученные сообщения или передавать данные после соответствующего запроса. Маркер циркулирует в логическом кольце, состоящем из ведущих устройств. Если сеть состоит только из одного ведущего, то маркер не передаётся (в таком случае в чистом виде реализуется система master-slave).
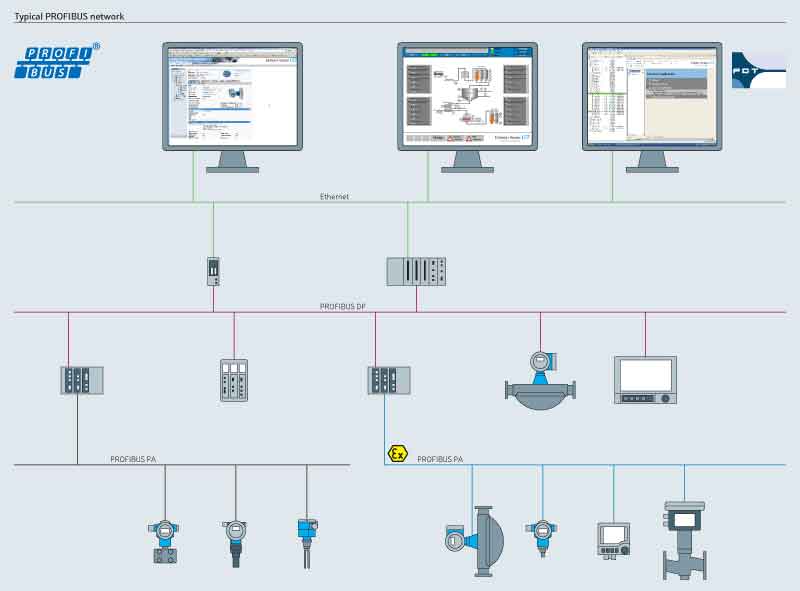
Рисунок 15 – Пример использования сети Profibus
С применением ПЛК мы можем не только управлять электроприводом, но и есть возможность для все возможных постановок и реализаций технических задач, что позволит нам расширить функциональность стенда и повысить уровень применения различных систем управления для более лучшей подготовки студентов.
Выводы
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2014 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты. Эта часть реферата исключительно обзорная. Дальнейшая работа будет направлена на экспериментальное исследование и доработку имеющихся результатов в сфере цифровых систем управления.
Список источников
- Пересада С.М., Ковбаса С.Н. Цифровые системы управления электроприводом [электронный ресурс] – Режим доступа:http://www.el-drives.com
- Пересада С.М., Ковбаса С.Н. Станция быстрого моделирования алгоритмов управления электроприводом [электронный ресурс] - Режим доступа:www.el-drives.com
- Полилов Е.В., Батрак А.М., Руднев Е.С., Скорик С.П., Горелов П.В. Исследовательский стенд для апробации алгоритмов Управления сложными электромеханическими системами // Електротехн. та комп'ют. системи. - 2011. - Вип. 3. - С. 481-487. - Библиогр.: 14 назв. - рус.
- Толочко О.И., Розкаряка П.И., Горобец Н.М. К вопросу об изменении типовых структур цифровых систем управления комплектными электроприводами // Наукові праці Донецького національного технічного університету. Серія: “Електротехніка і енергетика”, випуск 10 (180). - Донецьк: ДВНЗ «ДонНТУ», 2011. – C. 188-193
- Чорний О.П., Кравець О.М., Неборак О.І. Віртуальний комплекс «Система електроприводу генератор-двигун з електромашинним підсилювачем» // Електромеханічні і енергозберігаючі системи. – Вип. 3(11). – Кременчук: КДПУ им. М.Остроградского, 2010. – С. 107-111.
- Толочко О.И., Коцегуб П.Х., Розкаряка П.И Реализация алгоритмов цифрового управления позиционным электроприводом постоянного тока // Вісник Кременчуцького державного політехнічного університету імені Михайла Остроградського. Вип.3(44):Ч.1 . 2007 . 178 с. : іл. - С. 18-20.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. - М.: Энергоиздат, 1981. - 576 с.
- Алексеев К.Б., Палагута К.А. Микроконтроллерное управление электроприводом // Учебное пособие. - М.: МГИУ, 2008. - 298 с.
- Чекавский Г.С. Конспект лекция по СУЭП, ДонНТУ, каф. ЭАПУ, 2012 г.
- Усольцев А.А. Общая электротехника // Учебное пособие. СПб.: СПбГУ ИТМО, 2009. - 301 с.