
Реферат за темою випускної роботи
Зміст
- Вступ
- Огляд досліджень і розробок
- 1. Мета та задання дослідження
- 2. Основні питання, які мають бути вирішені в цій роботі
- 3. Структура стенду для дослідження цифрових систем
- 4. Огляд елементів силової частини стенду
- 4.1 Двигун постійного струму
- 4.2 Гальмівні режими ДПС
- 4.3 Тиристорний перетворювач як елемент СКЕП
- 4.4 Особливості реверсивних тиристорних перетворювачів
- 5. Системи керування
- 5.1 Система підпорядкованого регулювання
- 5.2 Цифровая система керування з використанням РС
- 5.3 Цифровая система керування ABB DCS 800
- Висновок
- Список джерел
Вступ
У сучасному світі невід'ємною частиною стали цифрові системи керування. На цьому етапі розвитку вони активно розвиваються в області автоматизації і систем керування промисловими технологічними об'єктами. Без них зараз складно представити точну, енергоефективну, якісну і безпечну роботу різних промислових об'єктів. Для розширення знань і підвищення знань студентів потрібно розробити експериментальний стенд для вивчення таких систем
Огляд досліджень і розробок
Через те, що нині складність систем (алгоритми) керування зросла, отже, створення експериментальної установки для перевірки алгоритму управління ускладнюється. У більшості випадків, в роботах про дослідження тієї або іншої системи представляють тільки результати математичного моделювання. Математичне моделювання дає нам можливість, не маючи фізичного об'єкту вивчити його властивості, що є першим і важливим кроком для подальшого вивчення, проте експериментальна установка з використанням фізичної моделі є основним етапом в проектуванні нових алгоритмів і систем керування. Дозволяє виявити деякі особливості, які при математичному моделюванні не ощутимі, але можуть зробити великий вплив на якість керування.
Останніми роками у сфері інформаційних технологій став проявлятися інтерес до поняття як "Віртуальна учбова лабораторія" (ВУЛ) стосовно технічної сфери.
Термін ВУЛ можна застосувати до сучасних способів дослідження процесів, які протікають в ЕМС на основі математичного опису і заснованою на ній моделі. Математичне моделювання як правило виконується з використанням прикладних програм. Серед іноземних фірм лідируючі позиції в розробці прикладних програм займають такі компанії як MathWorks, MicroSim, Cadence Design Systems, Interactive Image Technologies, National Instruments, Spectrum Software, MathSoft, Wolfram Research. При розробці стендів для взаємодії математичної моделі і фізичною в основній масі використовують MATLAB, Mathcad, LabVIEW. Кожен пакет відрізняється один від одного по своїй структурі і математичними можливостями.
На кафедрах електроприводу на території України були створені лабораторні експериментальні установки, які можуть поєднувати дослідження об'єкту, як на рівні моделювання, так і на рівні фізичного експерименту. У цих роботах [2 - 6] был був розроблений комплекс різних заходів:
- Перевірка аналітичних методів, на експериментальній установці, що дозволяє реалізувати цифрову систему керування положенням електроприводу постійного струму в реальному часі [6]
- Використання станції швидкого моделювання, яка дозволяє зробити моделювання з використанням віртуального об'єкту управління, т. т. алгоритм керування відпрацьовується не на реальній установці, а на внутрішній моделі (двигуна, перетворювача) [2]
- Реалізація, апробації і дослідження нових алгоритмів ідентифікації, керування і спостереження різних електромеханічних систем із складними параметричними і функціонально невизначеними об'єктами [3]
- Реалізація в установці "механізму" імітації різних технологічних процесів [4]
- Використання комплектних електроприводів з розширенням і ускладненням типових систем, які були закладені виробником із застосуванням додаткових модулів [3]
- Можливість імітації нормальних, передаварійних і аварійних режимів роботи [5]
- Спостереження за станом системи в цілому так і за окремими її елементами [3, 5]
Алгоритми керування стають уніфікованими і різниця між налаштуваннями приводу постійного і змінного струму вже не такі істотні, як були до реалізації систем керування у цифровому виді
У реалізованих проектів є свої достоїнства і недоліки. Виходячи з досвіду створення різних експериментальних установок в різних ВНЗ країни, враховуючи усі достоїнства і недоліки, ведеться розробка лабораторного стенду для дослідження різних цифрових систем автоматичного керування на базі електроприводу постійного струму в реальному часі з можливістю керування від різних програмованих комплексів.
1. Мета та задання дослідження
Мета - створення лабораторного стенду для дослідження різних цифрових систем автоматичного керування на базі електроприводу постійного струму в реальному часі з можливістю керування від різних програмованих комплексів з використанням різноманітних видів перетворювальної техніки. Дослідження повинні робитися у взаємозв'язку з видозміненими схемами і режимами роботи електроприводу, а так само з використанням новітньої перетворювальної техніки.
2. Основні питання, які мають бути вирішені в цій роботі:
- Аналіз існуючих рішень в області систем керування і перетворювальної техніки
- Створення власного лабораторного стенду для наукових і практичних досліджень
- Демонстрація можливих методів зміни структури системи і алгоритмів керування комплектним електроприводом
- Розробка системи автоматичного регулювання електроприводом в реальному часі із застосуванням цифрових систем
- Моделювання процесів в створеній системі регулювання
3. Структура стенду для дослідження цифрових систем
Лабораторний стенд об'єднує в собі наступні компоненти: два двигуни постійного струму, два комплектні тиристорні перетворювачі (2х квадрантних) ABB DCS 800, з можливістю управління по промисловому мережевому протоколу Profibus - DP; два перетворювачі серії БТУ (4х квадрантних), з можливо керування як від цифрових систем керування, так і від аналогових схем; комп'ютер типу PC з використанням високошвидкісної PC сумісною платою розширення АЦП/ЦАП 5710-1 Octagon systems, а так само комп'ютер для можливого точнішого налаштування комплектного перетворювача DCS 800; два тахогенератори для виміру швидкості обертання; гальванічні розв'язки; стрілочні прилади на панелі для виміру і регулятори напруги; Vipa Speed 7 – 314ST
Рисунок 1 – Принципова схема стенду
(анімація: 6 кадрів, 7 циклов повторення, 260 кілобайт)

Рисунок 2 – Зовнішній вигляд комплектного перетворювача ABB DCS 800
4. Огляд елементів силової частини стенду
4.1 Двигун постійного струму
Машина постійного струму - електрична машина, призначена для перетворення електричної енергії постійного струму в механічну енергію (двигун) або для зворотного перетворення (генератор).
Принцип дії. Машина постійного струму має обмотку збудження, розташовану на явно виражених полюсах. По обмотці протікає постійний струм (струм збудження), що створює магнітне поле збудження. На роторі розташована двошарова обмотка, в якій при обертанні ротора індукується змінна ЕДС. За допомогою механічного перетворювача енергії - колектора, ця ЕДС випрямляється. При заданому напрямі обертання якоря напрям ЕДС, індукованою в його провідниках залежить від того, під яким полюсом знаходиться провідник, тому в усіх провідниках, розташованих під одним полюсом, напрям ЕДС однаково і зберігається таким незалежно від частоти обертання.
Конструктивно машина постійного струму складається із статора (на якому знаходиться обмотка збудження), ротора (якорі) і щітково-колекторного апарату (перетворенні змінної ЕДС в постійну напругу або навпаки).
За способом електричного з'єднання обмоток двигуни постійного струму бувають незалежного, паралельного, послідовного і змішаного збудження. Спосіб з'єднання обмоток впливає на вигляд статичних і динамічних характеристик.
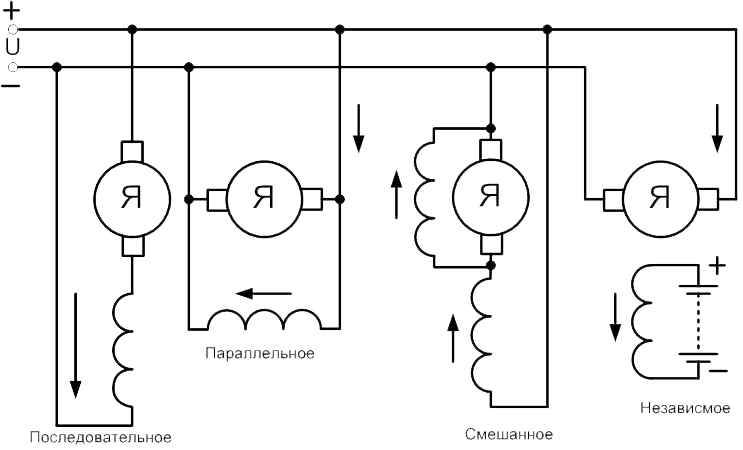
Рисунок 3 – Cхеми з'єднання обмоток ДПС
Найбільше поширення отримали ДПС з незалежним збудженням. Відмінною їх рисою є можливість роздільного керування струму якоря (керування в першій зоні, нижче швидкості холостого ходу) і магнітного потоку (у другій зоні, вище за швидкість холостого ходу). Використовуючи рівняння якірного ланцюга, виразив з нього ЕДС і розділивши на твір магнітного потоку і конструктивною постійною, отримаємо рівняння механічної статичної характеристики:
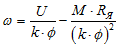
З нього добре видно, що швидкість двигуна можна змінити трьома способами - зміною напруги якоря, зміною магнітного потоку, введенням додаткових опорів. Регулювання за допомогою введення додаткових опорів украй неефективно, зважаючи на зменшення ККД і необхідності в потужних резисторах, що вимагають хорошого охолодження. Тому цей спосіб регулювання розглянутий не буде. При цьому можна помітити, що характеристики отримані послабленням поля мають різну жорсткість, яка менше ніж у природної механічної характеристики.
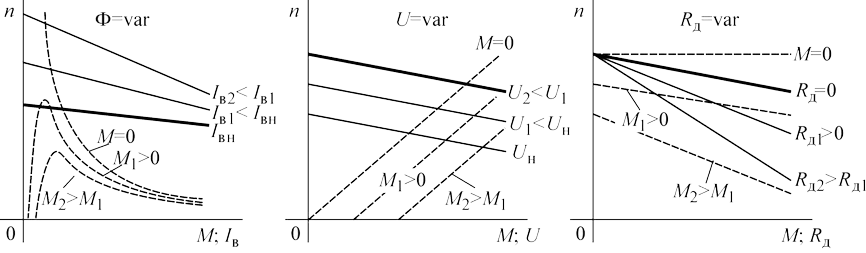
Рисунок 4 – Регулювання швидкості двигуна постійного струму
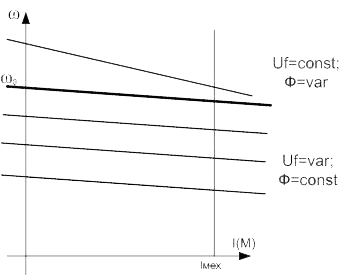
Рисунок 5 – Регулювання швидкості в першої та другої зонах
Машина постійного струму може працювати як в руховому (швидкість двигуна нижча швидкості холостого ходу), так і в генераторному (вище за швидкість холостого ходу) режимі, віддаючи енергію в мережу.Реверс здійснюється або зміною напряму струму якоря, або зміною напряму струму збудження.
4.2 Гальмівні режими ДПС
Гальмування можна здійснювати наступними способами:
- Генераторне гальмування
- Гальмування противовмиканням
- Динамічне гальмування
Генераторне гальмування (рекуперативне) - таке гальмування застосовується при переході на нижчу швидкість. При пониженні напруги швидкість і відповідно ЕДС не можуть миттєво змінитися, це призводить до того, що струм міняє напрям і починає протікати від двигуна до джерела напруги.
Гальмування противовмиканням робиться шляхом перемикання полярності напруги якоря і введенням в його ланцюг додаткового опору. Після досягнення точки 3 необхідно знеструмити двигун і, залежно від того який момент навантаження прикладений, накласти механічне гальмо.
Динамічне гальмування здійснюється замиканням якоря двигуна на додатковий опір. При активному моменті навантаження необхідно також накласти механічне гальмо при нульовій швидкості.
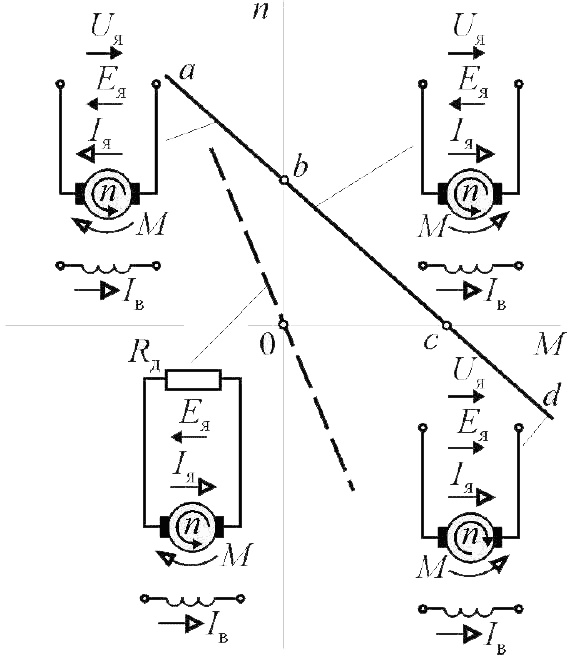
Рисунок 6 – Режими гальмування (ab – Генераторне гальмування, cd – противовмикання, пунктир – динамічне)
4.3 Тиристорний перетворювач як елемент СКЕП
У структуру сучасних ТП входять наступні елементи:
- Трансформатор або струмообмежувальний реактор. Трансформатор служить для узгодження по напрузі двигуна з мережею, реактор - для обмеження швидкості наростання прямого струму через тиристор.
- Силова схема ТП, що забезпечує перетворення роду струму з одного виду в інший.
- СІФУ, яка забезпечує перетворення безперервного вхідного сигналу Uу, що отримується з системи регулювання, в послідовність імпульсів, що управляють, на тиристори.
- Комутаційна і захисна апаратура (облаштування управління і захисту ОУЗ), що забезпечує підключення перетворювача до мережі і до навантаження, відключення ТП від мережі і аварійне гальмування двигуна, а також різні захисту двигуна.
- Крім того, до складу перетворювача тиристора може входити згладжуючий реактор (дросель), призначений для поліпшення форми випрямленого струму і обмеження зони переривчастих струмів.
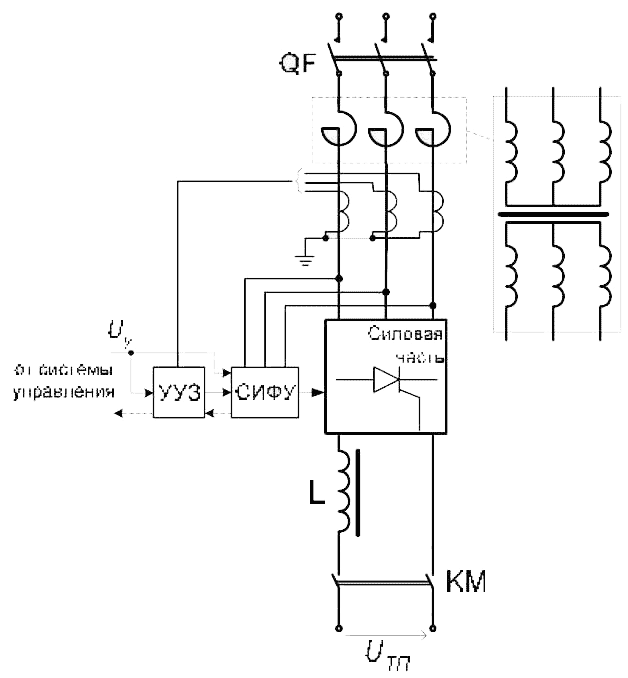
Рисунок 7 – Спрощена функціональна схема ТП
Основною ланкою ТП є силова схема. Силові схеми ТП діляться на нульові і мостові. Основним типом схем в ЕП постійного струму є мостова схема. Нульові схеми застосовуються досить рідко - для живлення малопотужних двигунів і ланцюгів збудження. Найбільш поширені трифазні нереверсивні схеми.
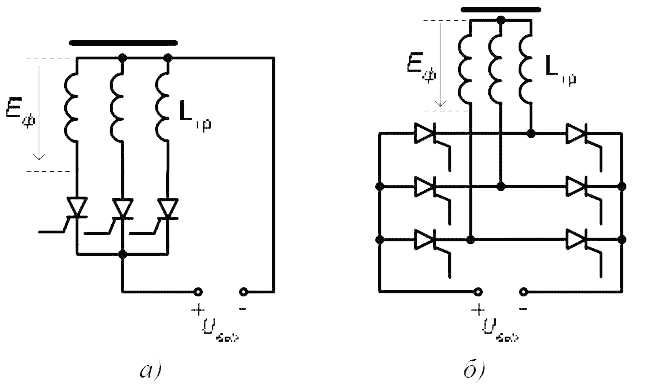
Рисунок 8 – Силові схеми трифазних нереверсивних ТП: а – нульова; б – мостова.
Важливими показниками силових схем ТП є:
- пульсність випрямленої напруги m, рівна числу фаз ТП (для трифазної мостової схеми m=6, для трифазної нульової m=3);
- коефіцієнт схеми - відношення максимальною випрямленою ЕДС Ed0 до діючого значення Eф фазною ЕДС мережі, живлячою ТП (якщо ТП підключається до мережі через трансформатор, то в якості напруги мережі розглядається ЭДС вторинної (вентильною) обмотки трансформатора):
Числ. значения: kcx=2,34 – для мостової схеми, kcx=1,17 – для нульової.
4.4 Особливості реверсивних тиристорних перетворювачів
Зміна полярності напруги, що прикладається до двигуна, спричиняє за собою відповідну зміну напряму протікання струму. Оскільки тиристор має однополярну провідність, реверсування струму можна здійснити:
- за допомогою контакторного реверсора (застосовується для маловідповідальних приводів малої потужності)
- за допомогою установки двох комплектів тиристорів, кожен з яких живить навантаження струмом протилежної полярності
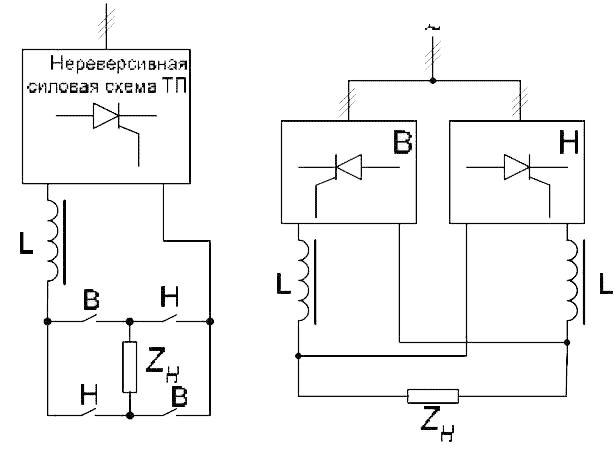
Рисунок 9 – Реверсивні схеми
При реалізації другого способу можливі дві схеми - перехресна і зустрічно-паралельна.
Зустрічно-паралельна схема знайшла найбільше поширення в реверсивних ЕП тиристорів постійного струму, оскільки обумовлює меншу встановлену потужність ТП і кращі массогабаритні показники.
За способом керування розрізняють реверсивні ТП з роздільним і спільним управлінням.
Нині спільне керування групами ТП використовується у відносно окремих випадках реалізації спеціальних ЕП, режими роботи яких пов'язані з протіканням малих струмів і частою зміною полярності струму. При спільному управлінні дві СІФУ (для кожної групи) здійснюють зрушення імпульсів, що керують, в протилежних напрямах, причому імпульси подаються безперервно на тиристори обох груп. Одна група працює у випрямному режимі (α<90°), а друга – в інверторном (β<90°). Стан груп вентилів, що проводить, і напрям струму навантаження визначається співвідношенням ЕДС перетворювачів і навантаження.
Недоліки спільного керування:
- із-за протікання зрівняльного струму має місце додаткове струмове завантаження ТП і мережі, збільшуються втрати, зменшуються к.к.д. і коефіцієнт потужності ТП;
- можливе виникнення к.з. між комплектами вентилів;
- необхідність використання дорожчих трансформаторів з двома вторинними обмотками і зрівняльних реакторів.
Усі сучасні серійні ТП випускаються з роздільним керуванням, при якому відмикаючі імпульси подаються на тиристори тільки однієї групи, а імпульси другої при цьому заблоковані. Перемикання груп можливе тільки по сигналу з системи регулювання при нулі струму в ланцюзі навантаження. Сигнал на перемикання груп вентилів виробляється за допомогою логічного перемикального пристрою (ЛПУ).
Устройство ЛПУ формирует логические сигналы на работу тиристорных групп в зависимости от сигналаi0, нульового струму (ДНС), що поступає від датчика, а також логічного сигналу необхідного напряму струму is, отримуваного з системи керування (вказує, яка саме група повинна працювати).
При перемиканні груп прагнуть забезпечити, щоб ЕДС групи, що вмикається, була б рівна ЕДС групи, що вимикається, - за цієї умови буде відсутній кидок струму при перемиканні і прискориться процес спаду струму. Для цієї мети найчастіше використовують перемикач характеристик (ПХ), який одночасно з перемиканням груп змінює полярність сигналу Uy на протилежну.
При виникненні аварійної ситуації СІФУ виробляє логічний сигналuсз селективного захисту, який блокує подання імпульсів на тиристори обох груп
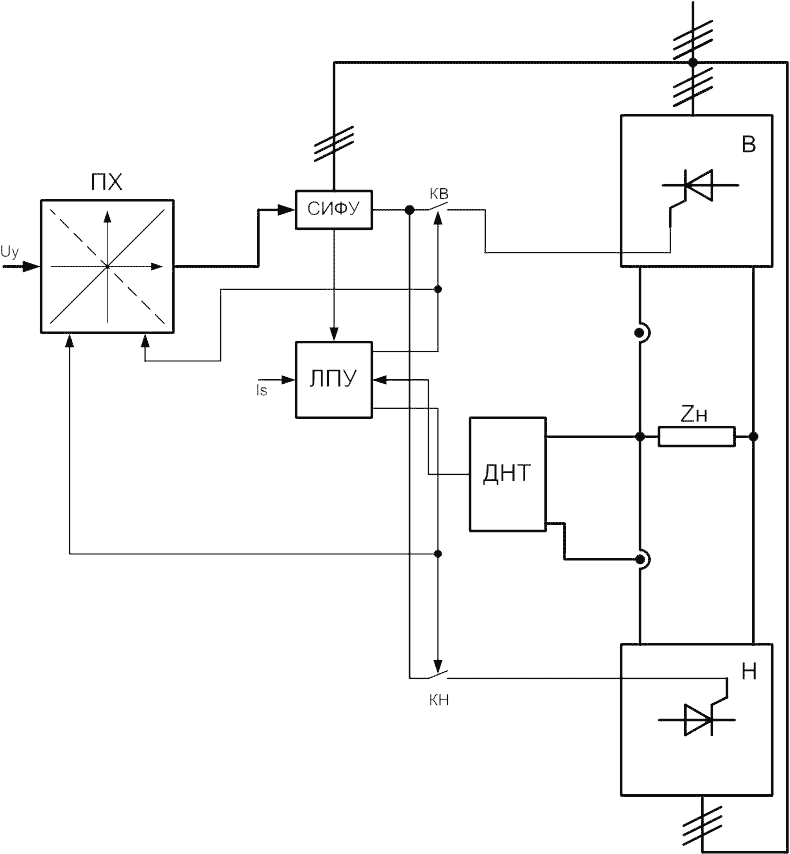
Рисунок 10 – Функциональна схема ТП с роздільним керуванням.
5. Системи керування
5.1 Система підпорядкованого регулювання
Як видно із статичних механічних характеристик, із зростанням моменту кутова швидкість зменшується, що неприпустимо в пристроях, де потрібне точне регулювання швидкості і забезпечення однакового моменту на різних швидкостях. Для цих цілей застосовують замкнуті системи регулювання із зворотним зв'язком за швидкістю або ЕДС/напрузі, які компенсують ту, що просіла за швидкістю шляхом підняття напруги якоря або послаблення магнітного поля, залежно від зони регулювання.
Регулювання кутової швидкості по ланцюгу якоря. Запишемо рівняння якірного ланцюга, рівняння моменту, ЕДС а також другий закон Ньютона для обертального руху, і, перейшовши в операторну форму запису, знайдемо передатні функції і складемо структурну схему.
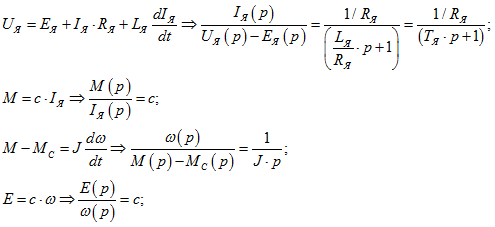
Розраховуючи регулятори струму і швидкості, нехтуємо впливом ПРОТИВО-ЕДС, вважаючи його незначним.
Суть налаштування - реалізація регулятора з ПФ зворотнього добутку ПФ прямої гілки і гілки ОС контура регулювання.
Для контура струму:

Але оскільки інерційність перетворювача неможливо компенсувати, ми її виключаємо з синтезу. Оскільки в контурі струму є присутнім обурення, а його необхідно виконати астатичним, отже, регулятор струму має бути ПІ типу, але, виходячи з вище за сказане, отримуємо ПД ПФ
Умножив полученную ПФ на интегратор с постоянной времени Tm получим искомую ПФ:
Передатна функція усього контура струму:
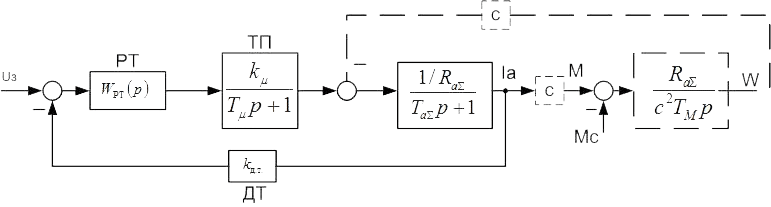
Рисунок 11 – Структурна схема контура регулювання струму
Аналогічно виконується налаштування контура регулювання швидкості. У результаті отримуємо ПФ регулятора швидкості і структурну схему усієї системи цілком:
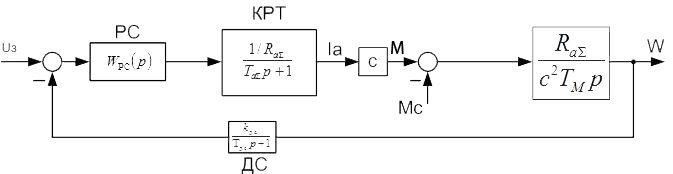
Рисунок 12 – Структурная схема контура регулирования швидкості
5.2 Цифровая система керування з використанням РС
Сучасні системи керування електродвигунами будуються з використанням цифрової техніки. Останніми роками широке поширення в усіх галузях промисловості отримали мікропроцесори для цифрової обробки сигналів – DSP (Digital Signal Processors).
Основною відмінністю DSP від звичайного процесора є висока швидкість виконання операцій типу X=AB C (за один такт). Як відомо, алгоритм керування електричним двигуном переважно складається з арифметичних операцій множення і складання, а отже застосування DSP в системах керування електроприводами украй доцільно. DSP містять у своїй структурі окрім стандартних для будь-якого мікропроцесора блоків (АЛУ, ППЗУ, контроллери переривань, і ін.) блоки, що забезпечують керування силовим перетворювачем (ШИМ модулятор), збір інформації про стан системи (АЦП, Encoder), і т. п.
Цифровий контроллер повинен мати необхідну обчислювальну потужність для розрахунку і видачі сигналів управління, а також мати необхідний інтерфейс для керування системою в реальному масштабі часу.
Для побудови власної цифрової системи керування використовуємо комп'ютер типу PC з використанням високошвидкісної PC сумісною платою розширення АЦП/ЦАП 5710 Octagon systems.
Octagon 5710 представляет собой плату АЦП с высоким разрешением, на которой также содержатся устройства ввода/вывода дискретных сигналов.
Аналогова частина плати дозволяє робити виміри з частотою 70000 вимірів в секунду. Ініціалізація перетворювача здійснюється або під керуванням плати обчислювача (процесорної плати) або за допомогою розташованого на платі 5710 лічильника/таймера. Лічильник/таймер може бути використаний для виконання тимчасових вимірів загального призначення або для генерації ШІМ-сигналу.
До плати 5710 можуть бути підключені 16 уніполярних або 8 диференціальних аналогових сигналів. Роздільна здатність АЦП складає 12 розрядів проивходном сигналі (-5..+5) В. Перемикання каналів здійснюється програмним способом. Допускається подавати на входи сигнали напругою до (-15...+ 15) В за відсутності на платі напруги живлення. На платі також є 2 аналогових вихідних каналу. Вихідний сигнал також задається перемичками і може бути (0..5) В, (+-10) В В або (+-5) В. Плата 5710 дозволяє працювати з 19 дискретними лініями введення/виведення.

Рисунок 13 – Зовнішній вигляд плати 5710 Octagon systems
Для системи керування використовуватимуться як аналогові входи/виходи, так і цифрові. Аналогові для прочитування координат які змінюються в плині часу (такі як: струм Ia, струм Iв, швидкість обертання двигуна), а так само дискретні для передбачення різних защит.
Система керування створена на основі систем підпорядкованого регулювання і виконана в пакеті MATLAB з використанням Simulink, перетворена для використання в середовищі QNX, де передбачена редагування і запис параметрів досліджуваного об'єкту, що цікавлять нас. QNX операційної системи реального часу. Виділяється якнайповнішим набором інструментальних засобів, до яких користувач звик в DOS або UNIX, забезпечує усі невід'ємні складові системи реального часу : багатозадачність, диспетчеризацію програм на основі пріоритетів і швидке перемикання
Період дискретності цифрової машини, що керує, складає 0,5 мс. Окрім функції керування на систему покладені ще і функції візуалізації з можливістю оперативного керування системою з клавіатури комп'ютера. Реєстрація необхідних сигналів (як внутрішніх, так і зовнішніх сигналів системи) здійснюється з частотою 2кГц.
5.3 Цифровая система керування ABB DCS 800
Перетворювач ABB DCS 800 є комплектним. Комплектний електропривод - це електропривод, укомплектований на заводі-виготівнику усіма вузлами, необхідними для його функціонування.
При використанні цього перетворювача нам дається можливість параметрировання різних параметрів (доступно близько 1000) для підвишення його енергоефективності і якості необхідних характеристик.
Приклад впливу різних параметрів на керування швидкістю:
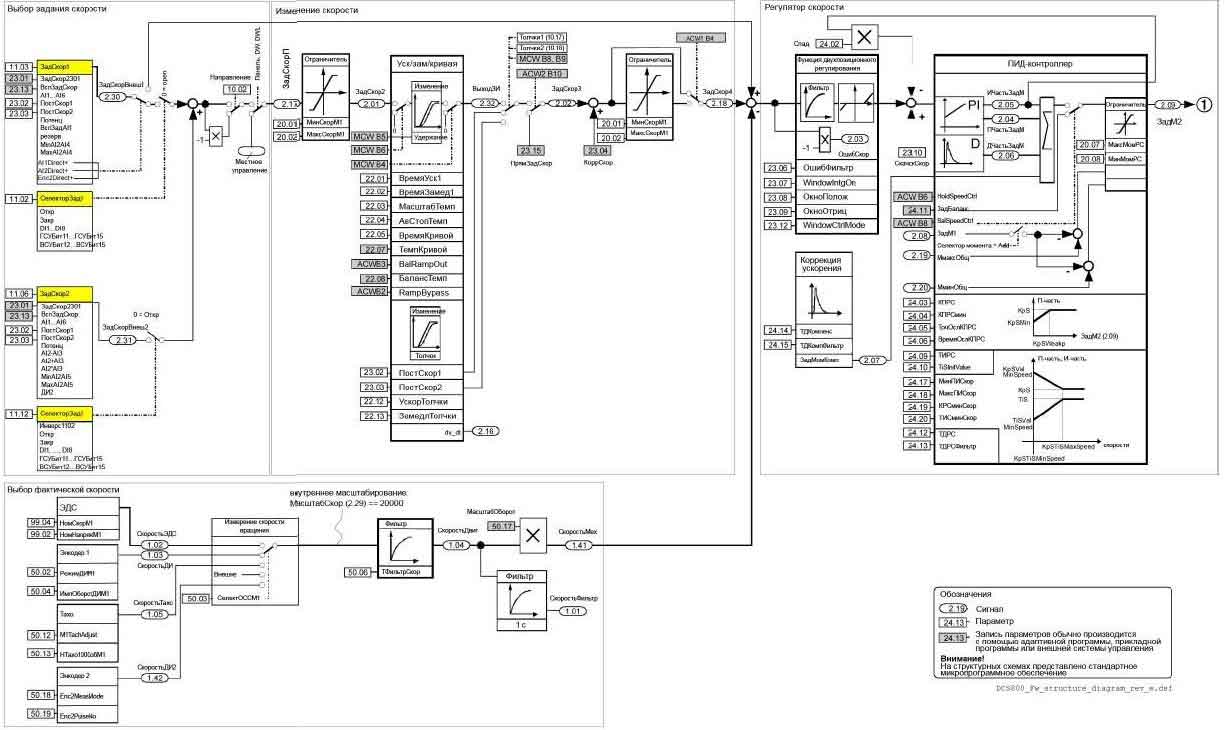
Рисунок 14 – Блок схема керування швидкістю двигуна
Є різні варіанти управління DCS 800 і налаштування:
- Керування і параметрування за допомогою передньої панелі
- Керування і моніторинг з використанням високошвидкісної плати АЦП/ЦАП 5710
- Керування, параметрування і моніторинг з використанням програмного забезпечення Drivewindow 2
- Керування з використанням пакету для промислової автоматизації CoDeSys
- Керування з використанням промислових мереж типуProfibus-DP и ПЛК серії 300 (Siemens або Vipa)
Для стенду буде застосовано окрім, керування і моніторингу з використанням високошвидкісної плати АЦП/ЦАП 5710 і параметрування і моніторингу з використанням програмного забезпечення Drivewindow 2, використання промислового протоколу передачі інформації типу Profibus-DP
Profibus DP (Decentralized Peripheral — Розподілена периферія) - протокол, орієнтований на забезпечення швидкісного обміну даними між:
- системами автоматизації (ведучими DP-устройствами)
- облаштуваннями розподіленого введення-виведення (веденими DP-устройствами)
Протокол характеризується мінімальним часом реакції і високою стійкістю до дії зовнішніх електромагнітних полів. Оптимізований для високошвидкісних і недорогих систем. Ця версія мережі була спроектована спеціально для зв'язку між автоматизованими системами управління і розподіленою периферією..
Мережа Profibus складається з ведучих (англ. master) і ведених (англ. slave) станцій. Провідна станція може контролювати шину, тобто може передавати повідомлення (без видалених запитів), коли вона має право на це (тобто коли у неї є маркер). Ведена станція може лише розпізнавати отримані повідомлення або передавати дані після відповідного запиту. Маркер циркулює в логічному кільці, що складається з провідних пристроїв. Якщо мережа складається тільки з одного ведучого, то маркер не передається (у такому разі в чистому вигляді реалізується система.
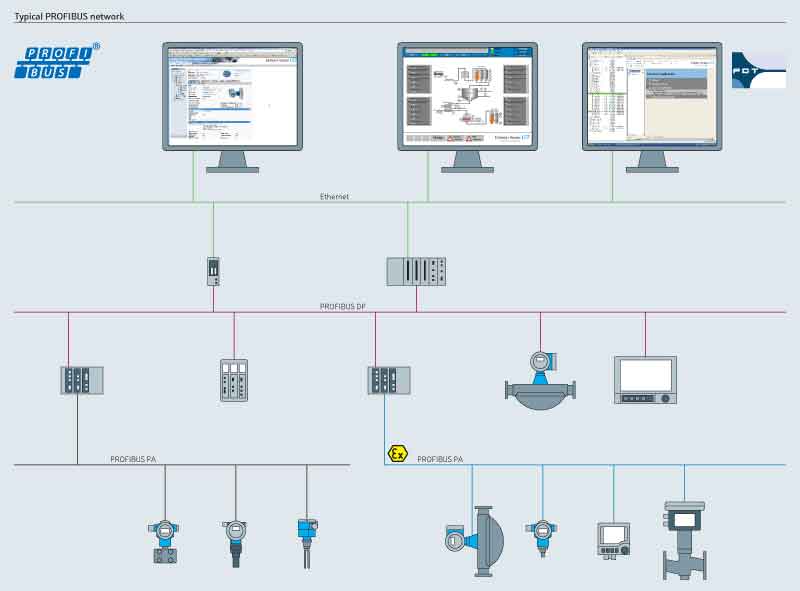
Рисунок 15 – Приклад використання мережі Profibus
Із застосуванням ПЛК ми можемо не лише керувати електроприводом, але і є можливість для все можливих постановок і реалізацій технічних завдань, що дозволить нам розширити функціональність стенду і підвищити рівень застосування різних систем управління для більше кращої підготовки студентів.
Висновок
При написанні цього реферату магистреская робота ще не завершена. Остаточне завершення: грудень 2014 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати. Ця частина реферату виключно оглядова. Подальша робота буде спрямована на эксперементальное дослідження і доопрацювання наявних результатів у сфері цифрових систем керування.
Список джерел
- Пересада С.М., Ковбаса С.Н. Цифровые системы управления электроприводом [электронный ресурс] – Режим доступа:http://www.el-drives.com
- Пересада С.М., Ковбаса С.Н. Станция быстрого моделирования алгоритмов управления электроприводом [электронный ресурс] - Режим доступа:www.el-drives.com
- Полилов Е.В., Батрак А.М., Руднев Е.С., Скорик С.П., Горелов П.В. Исследовательский стенд для апробации алгоритмов Управления сложными электромеханическими системами // Електротехн. та комп'ют. системи. - 2011. - Вип. 3. - С. 481-487. - Библиогр.: 14 назв. - рус.
- Толочко О.И., Розкаряка П.И., Горобец Н.М. К вопросу об изменении типовых структур цифровых систем управления комплектными электроприводами // Наукові праці Донецького національного технічного університету. Серія: “Електротехніка і енергетика”, випуск 10 (180). - Донецьк: ДВНЗ «ДонНТУ», 2011. – C. 188-193
- Чорний О.П., Кравець О.М., Неборак О.І. Віртуальний комплекс «Система електроприводу генератор-двигун з електромашинним підсилювачем» // Електромеханічні і енергозберігаючі системи. – Вип. 3(11). – Кременчук: КДПУ им. М.Остроградского, 2010. – С. 107-111.
- Толочко О.И., Коцегуб П.Х., Розкаряка П.И Реализация алгоритмов цифрового управления позиционным электроприводом постоянного тока // Вісник Кременчуцького державного політехнічного університету імені Михайла Остроградського. Вип.3(44):Ч.1 . 2007 . 178 с. : іл. - С. 18-20.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. - М.: Энергоиздат, 1981. - 576 с.
- Алексеев К.Б., Палагута К.А. Микроконтроллерное управление электроприводом // Учебное пособие. - М.: МГИУ, 2008. - 298 с.
- Чекавский Г.С. Конспект лекция по СУЭП, ДонНТУ, каф. ЭАПУ, 2012 г.
- Усольцев А.А. Общая электротехника // Учебное пособие. СПб.: СПбГУ ИТМО, 2009. - 301 с.