
Abstract
Content
- Introduction
- 1. Relevance of the topic
- 2. The purpose and objectives of the study, appointment
- 3. Mathematical model
- 4. Equipment and software
- Conclusion
- List of sources
Introduction
Providing quality and uninterrupted power auxiliary systems 6 kV of power is a major task in organizing the process of electricity generation. The technological process of the power plant is connected with the work of a large number of mechanisms, which include mechanisms that facilitate the supply of fuel to the furnace, water circulation, lubrication of the bearings numerous equipment, cooling generators and more. Short dips and voltage, the system's own needs, may disrupt and stop the whole cycle of production of electricity, as well as to accidents.
This work is devoted to improving the reliability of power supply of auxiliary systems with asynchronous engines, through the use of high-speed automatic transfer switch in the microprocessor design. The proposed device can reduce the break in nutrition and prevent nonsynchronous supply voltage to the motors that power is lost.
1. Relevance of the topic
asynchronous engines are widely used in power plant auxiliary systems, as well as in various industries. Such widespread use of asynchronous drives due to their simple and reliable construction-economic performance. However, at low voltage, as a consequence of short-circuits and short interruptions are not always ensured their successful self-starting. This leads to disruption of the process and economic loss. Therefore, the development of microprocessor AVR ensure successful self-start engines, is a hot topic.
2. The purpose and objectives of the study, appointment
The main objectives of this work is:
- Improvement of the method fast-acting automatic input of reserve in the power systems with asynchronous engines, which consists in measuring the positive sequence voltage busbar primary and backup power source, and the angle between them, as well as determining the direction of the active power at the main power input tires;
- Development of microprocessor device fast-acting automatic input of reserve in the systems of own needs power plants.
To achieve these goals, you need to solve the following problems:
- Development of a mathematical model of the system auxiliary power asynchronous engines;
- An implementation of the mathematical model, an algorithm based on fast-acting AVR voltage control and active power;
- Improving the algorithm based on the analysis of the simulation results;
- Development of circuitry and software for microprocessor fast-acting AVR auxiliary systems.
Appointment
Microprocessor fast-acting AVR designed to provide continuous power supply to consumers by their switch to the backup power supply during breaks, while providing:
- Saving the dynamic stability of the motor load connected to the substation buses;
- Reducing the number of outages due to motor starters and contactors dropout at low voltage;
- Reducing the duration of power interruption, which would lead to a smaller reduction in the speed of rotation of the rotor and the subsequent rapid self-starting motor;
- Prevention of asynchronous backup supply voltage to prevent the emergence of currents in the motor exceeds the tolerance. This increases the service life of engines;
- Keeping other power consumers, including systems and devices for automatic control, thereby improving the reliability of power supply of the whole object.
3. Mathematical model
According to [1], to evaluate the possibility of continuity process (supply reliability and stability of the high electric motor load) during short power failure, is covered by the AVR, self-starting motor test conditions after the restoration of electricity consumers compiled generalized system of equations describing the operation of various types electric drives and mains fast AVR by introducing separation coefficients b (characterizing the saliency) and k (which characterizes the state of the excitation winding) into the system of equations Park-Goreva and presentation flux in the form of:
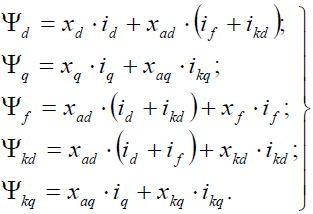
where xd = xad + xl + xs ;
xq = xaq + xl + xs ;
xl – resistance of the stator;
xs – resistance mains;
As a result of the generalized system of equations becomes:
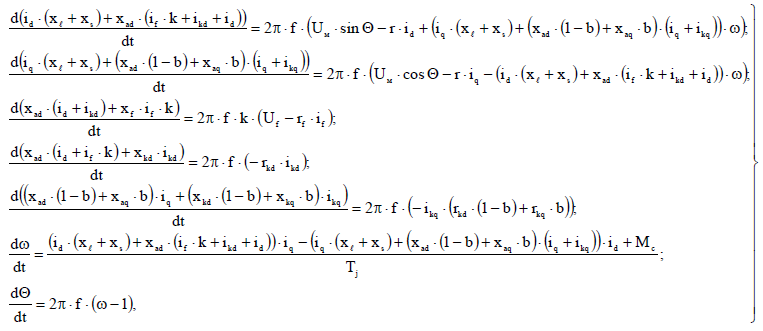
where k = b = 1 for salient pole SD;
k = 1, b = 0 for no salient pole SD
k = b = 0 for AD.
On the basis of the generalized system of equations developed a mathematical model [1] describing the operation of electromechanical systems with synchronous and asynchronous engines, power systems and fast AVR . The resulting model allows us to determine the allowable duration of interruption of power supply SD and AD. Permissible length of power supply interruption – is the maximum time after which the unit after power is returned to its pre-loss voltage. For research were adopted parameters engines STD-1250 and PED-48. The results obtained are shown in figures 1 and 2.
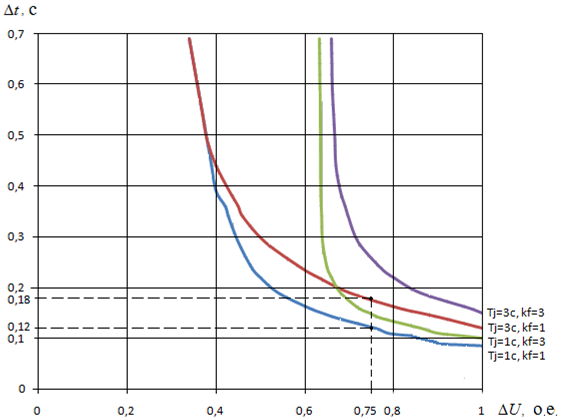
Figure 1 – Dependence allowable duration of interruption of power synchronous engines from Тj , ΔU , kf
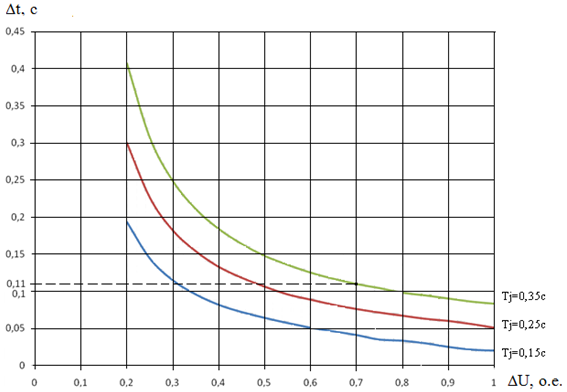
Figure 2 – Dependencies allowable duration of interruption of power asynchronous engines from Тj and ΔU
As seen from the dependences obtained [1], the permissible gap length Δt supply depends on the time constant of the electromechanical unit Tj , the voltage dip magnitude ΔU and, in the case of a synchronous motor, forcing coefficient kf . For ΔU = 0,75 and Tj = 1–3 s in the case of a CD with Δt = 0,12–0,18 for ΔU = 0,7 and Tj = 0,35 s in the case of AD with Δt = 0,11 s.
4. Equipment and software
Fast-acting AVR is most appropriate to implement microprocessor platform, based on the basis of modern microcontroller STM32F4xx, manufactured by STMicroelectronics [2], which includes a 32-bit kernel, a new generation of ARM Cortex-M4 with a clock frequency of 168 MHz [3].
Figure 3 – Processor core ARM Cortex-M4
(animation: 5 frames, 5 cycles, 180 kB)
The kernel supports technologies such as multiply-accumulate per cycle (single-cycle MAC), saturating arithmetic, block floating-point FPU (floating point unit), flow control commands SIMD (single instruction multiple data). FPU unit is compatible with the IEEE 754 standard and allows the processor to perform a wide range of mathematical operations on real numbers.
DSP-instructions in the Cortex-M4 core executed in one cycle. Is no longer necessary to use an additional DSP-controller for signal processing, you can use one STM32F4xx, unifying conventional controller and DSP on a single chip.
STM32F4xx produced on 90 nm technology with already proven its effectiveness memory accelerator (ART Accelerator), which allows to work with memory without delay at maximum speeds. Performance 168 MHz clock frequency is 210 DMIPS. Microcontroller easily cope with the digital filtering, convolution and Fourier transform. Structure STM32F4xx microcontrollers is shown in fig. 5.
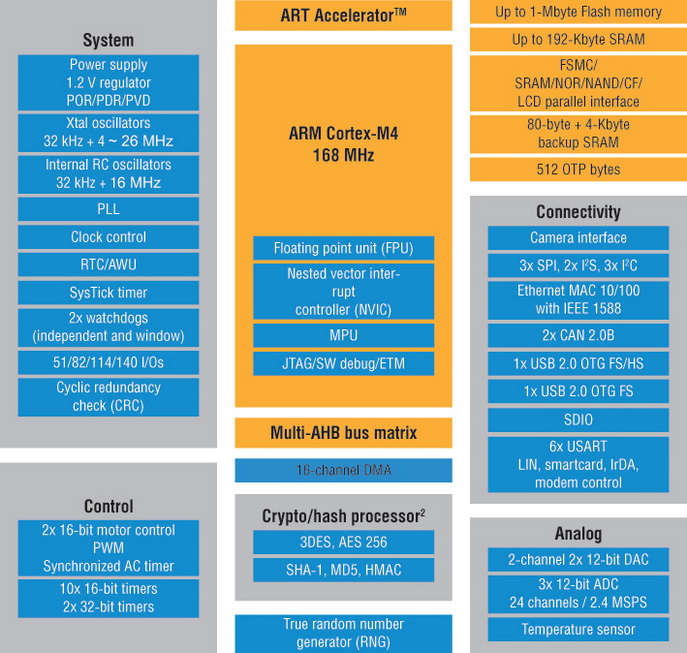
Figure 4 – Structure of microcontrollers STM32F4xx
Main characteristics STM32F4xx:
- Core ARM 32-bit Cortex-M4;
- Clock frequency 168MHz 210 DMIPS/1.25 DMIPS / MHz (Dhrystone 2.1);
- Supports DSP-instructions;
- New high-performance AHB-matrix tires;
- 1 MB Flash-memory;
- 192 + 4 Kbytes of SRAM-memory;
- Voltage 1,8-3,6 (POR, PDR, PVD and BOR);
- Internal RC-oscillator to 16MHz and 32kHz (for RTC);
- External clock source 4-26MHz and RTC – 32,768 kHz;
- Modules debug SWD/JTAG, module ETM;
- Three 12-bit ADCs 24 input channels. Speed up to 7.2 megasemplov;
- Two 12-bit DAC;
- DMA-controller on the 16 streams with support for packet transmission;
- 17 timers (16 and 32 bit);
- Two watchdog timers (WDG and IWDG);
- Communication interfaces: I2C, USART (ISO 7816, LIN, IrDA), SPI, I2S, CAN;
- USB 2.0 FS/HS OTG;
- 10/100 Ethernet MAC (IEEE 1588v2, MII/RMII);
- Controller SDIO (card SD, SDIO, MMC, CE-ATA);
- Interface Digital Camera (8/10/12/14-bitnye modes);
- FSMC-Controller (Compact Flash, SRAM, PSRAM, NOR, NAND and LCD 8080/6800);
- Hardware random number generator;
- Hardware calculation of CRC, 96-bit unique ID;
- AES encryption module 128, 192, 256, Triple DES, HASH (MD5, SHA-1), HMAC;
- Extended temperature range -40...105°C.
When developing software for the microcontroller to be used a bunch of programs MDK Keil [4] + Matlab [5] + STM32MatTarget [6]. Using packet STM32MatTarget additions to the software Matlab/Simulink allows faster and qualitatively important to implement the algorithm on the basis of high-speed AVR microcontroller STM32F4xx.
Package add STM32MatTarget contains blocks for setting: port and ADC, reading and writing data, timers and interrupts (fig. 5). These units allow you to implement most of the tasks and systems devices.
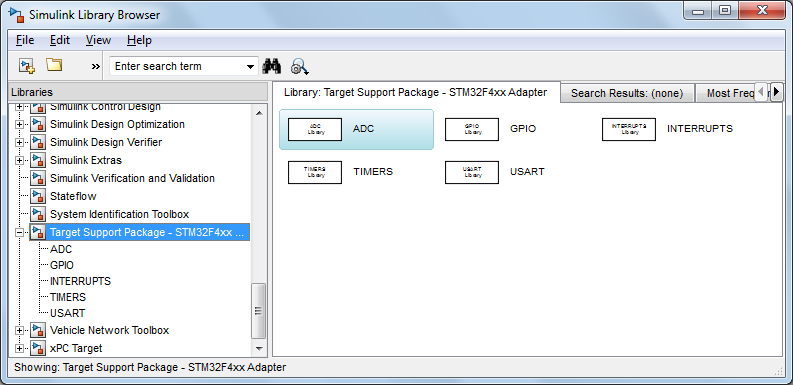
Figure 5 – Package additions STM32MatTarget software Matlab/Simulink
Conclusion
- The mathematical model of to assess the potential continuity of the process.
- The way of performing high-speed circuits AVR power supply with asynchronous engines.
- The application of this device, in combination with modern high-speed switches and power is lost to the section for any reason will perform switching to the backup power supply in the minimum possible time and eliminate nonsynchronous supply voltage to the motors running out, which greatly reduces the level and duration of flow launchers motor currents.
- Proposed to realize algorithm high-speed AVR on based using STM32F4xx and ligament programs MDK Keil + Matlab + STM32MatTarget.
In writing this essay master's work is not yet complete. The above information may differ from information and results given in the text made the master's work, which will be completed in January 2015. Full text of the work and materials on the topic can be obtained from the author or the scientific adviser after that date.
List of sources
- Муратбакеев Э. Х. Обоснование структуры и параметров многоуровневой системы электроснабжения объектов нефтедобычи с секционированием участков электрической сети – Санкт-Петербург, 2009
- Official site of company STMicroelectronics [electronic resource]. – Access mode: http://www.st.com/
- Official site of company ARM®Holdings [electronic resource]. – Access mode: http://www.arm.com/...
- Official site Keil uVision [electronic resource]. – Access mode: http://www.keil.com
- Package additions STM32MatTarget [electronic resource]. – Access mode: http://www.st.com/...
- Official site MathWorks [electronic resource]. – Access mode: http://www.mathworks.com/...