
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, назначение
- 3. Математическая модель
- 4. Обзор изобретения автоматического включения резервного питания
- 5. Оборудование и программное обеспечение
- Выводы
- Список источников
Введение
Обеспечение качественного и бесперебойного электроснабжения систем собственных нужд 6 кВ электростанции является основной задачей при организации технологического процесса производства электроэнергии. Технологический процесс на электростанции связан с работой большого числа механизмов, к которым относятся механизмы, обеспечивающие: подачу топлива в топку котла, циркуляцию воды, смазку подшипников многочисленного оборудования, охлаждение генераторов и другое. Короткие провалы и перенапряжения, в системе собственных нужд, могут привести к нарушению и остановке всего цикла производства электроэнергии, а также к возникновению аварий.
Данная работа посвящена вопросу повышения надёжности электроснабжения систем собственных нужд с асинхронными двигателями, за счёт применения быстродействующего автоматического ввода резерва в микропроцессорном исполнении. Предлагаемое устройство позволяет сократить время перерыва в питании и предотвратить несинхронную подачу напряжения на двигатели, которые потеряли питание.
1. Актуальность темы
Асинхронные двигатели широко применяются в системах собственных нужд электростанции, а также в различных отраслях промышленности. Такое широкое применение асинхронных приводов связано с их простым и надежным конструктивно-экономическим исполнением. Однако при понижении напряжения в сети, в следствии коротких замыканий и кратковременных перерывов питания, не всегда обеспечивается их успешный самозапуск. Это приводит к нарушению технологического процесса и экономическому ущербу. Поэтому, разработка микропроцессорных АВР, обеспечивающие успешный самозапуск двигателей, является актуальной темой.
2. Цель и задачи исследования, назначение
Основными целями данной работы, является:
- Cовершенствование способа БАВР в системах электроснабжения с асинхронными двигателями, заключающийся в измерении напряжения прямой последовательности шин основного и резервного источника питания, и угла между ними, а также определении направления активной мощности на вводе шин основного питания;
- Разработка быстродействующего АВР на основе микропроцессорного устройства.
Для реализации поставленных целей, необходимо решить следующие задачи:
- Разработка математической модели системы собственных нужд электростанции с асинхронными двигателями;
- Реализация, в математической модели, алгоритма быстродействующего АВР основанного на контроле напряжения и активной мощности;
- Совершенствование алгоритма на основе анализа полученных результатов моделирования;
- Разработка схемы и программного обеспечения микропроцессорного быстродействующего АВР для систем собственных нужд.
Назначение
Микропроцессорные быстродействующие АВР предназначены для обеспечения непрерывного электроснабжения потребителей путем их переключения на резервный источник при перерывах электропитания, обеспечивающие при этом:
- Сохранение динамической устойчивости двигательной нагрузки, подключенной к шинам подстанции;
- Уменьшение количества отключений электродвигателей по причине отпадания пускателей и контакторов при понижении напряжения;
- Сокращение продолжительности перерыва питания, которое приведет к меньшему снижению скорости вращения ротора и быстрому последующему самозапуску электродвигателей;
- Предотвращение несинхронной подачи резервного напряжения, чтобы предотвратить возникновению токов в двигателе, превышающие предельно допустимые. За счет этого увеличивается ресурс двигателей;
- Сохранение электропитания других потребителей, в том числе систем и устройств автоматического управления, обеспечивая тем самым повышение надежности электроснабжения объекта в целом.
3. Математическая модель
Согласно [1], для оценки возможности обеспечения непрерывности технологического процесса (надежности электроснабжения потребителей и устойчивости высоковольтной электродвигательной нагрузки) при кратковременных нарушениях электроснабжения, попадающих в зону действия АВР, проверки условий самозапуска электродвигателей после восстановления электроснабжения потребителей составлена обобщенная система уравнений, описывающая работу различного типа электроприводов и сети с БАВР путем введения разделительных коэффициентов b (характеризующего явнополюсность) и k (характеризующего состояние обмотки возбуждения) в систему уравнений Парка-Горева и представления потокосцепления в виде:
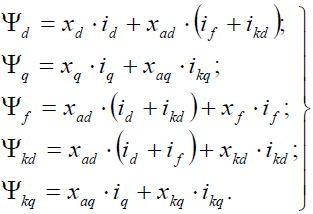
где xd = xad + xl + xs ;
xq = xaq + xl + xs ;
xl – сопротивление рассеяния статора;
xs – сопротивление питающей сети;
В результате обобщенная система уравнений примет вид:
где k = b = 1 для явнополюсного СД;
k = 1, b = 0 для неявнополюсного СД;
k = b = 0 для АД.
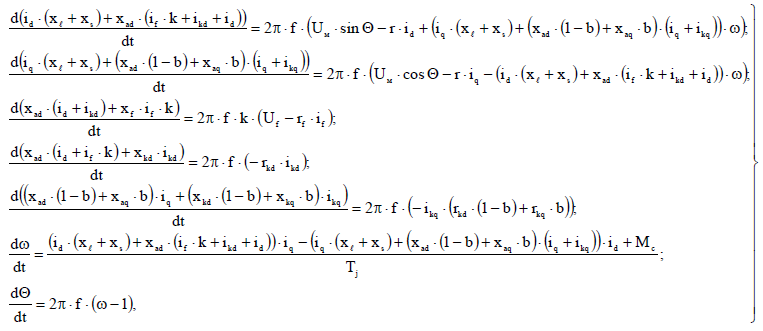
На основании обобщенной системы уравнений разработана математическая модель [1], описывающая работу электромеханических комплексов с синхронными и асинхронными электродвигателями, системы электроснабжения и БАВР. Полученная модель позволяет определить допустимую длительность перерыва электроснабжения СД и АД. Допустимая длительность перерыва электроснабжения – это максимальное время, по истечении которого после восстановления напряжения агрегат возвращается в состояние, предшествующее потере напряжения. Для исследований были приняты параметры двигателей СТД-1250 и ПЭД-48. Полученные результаты приведены на рис. 1 и рис. 2.
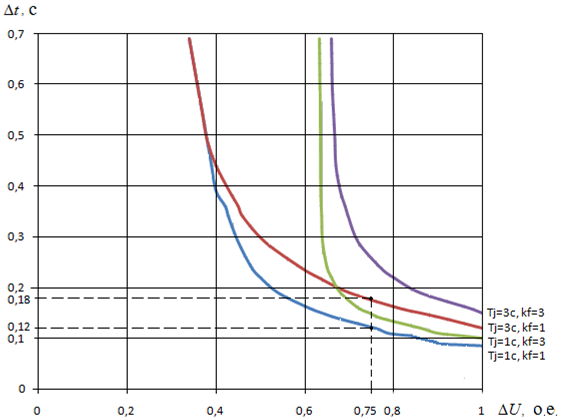
Рисунок 1 – Зависимости допустимой длительности перерыва электроснабжения синхронных двигателей от Тj , ΔU , kf
Рисунок 2 – Зависимости допустимой длительности перерыва электроснабжения асинхронных двигателей от Тj и ΔU
Как видно из полученных зависимостей [1], допустимая длительность перерыва Δt электроснабжения зависит от электромеханической постоянной времени агрегата Tj , величины провала напряжения ΔU и, в случае синхронного двигателя, коэффициента форсировки kf . Для ΔU = 0,75 и Tj = 1–3 с в случае СД Δt = 0,12–0,18 с, для ΔU = 0,7 и Tj = 0,35 с в случае АД Δt = 0,11 с.
4. Обзор изобретения автоматического включения резервного питания
В качестве способа автоматического включения резервного питания для магистерской работы, был выбран способ приведенный в изобретении [2]. Способ заключается в том, что в известном способе автоматического включения резервного электропитания потребителей, при котором измеряют напряжение прямой последовательности шин основного и резервного источника питания, измеряют угол между вектором напряжения прямой последовательности шин основного и резервного источников питания, определяют направление активной мощности на вводе шин основного источника питания, переключают шины основного источника питания на резервный при уменьшении напряжения прямой последовательности шин основного источника питания ниже заданного уровня или при увеличении угла между вектором напряжения прямой последовательности больше заданного и при направлении активной мощности от шин к основному источнику питания, согласно изобретению дополнительно измеряют минимальный ток ввода каждой секции, сравнивают его с заданным значением тока ввода и при превышении заданного тока осуществляют переключение на резервный источник питания.
Кроме того, известное устройство для автоматического включения резервного электропитания потребителей, содержащее вводные выключатели основного и резервного источников питания с блок-контактами и ключами управления, секционный выключатель с блок-контактами и ключом управления, трансформаторы напряжения на шинах основного и резервного источников питания, трансформаторы тока на вводах основного и резервного источников питания, два реле защиты, согласно изобретению дополнительно снабжено трансформаторами напряжения, включенными до вводных выключателей, быстродействующим пусковым устройством, содержащим блок управления, блок дискретных сигналов и констант, устройство индикации, аналого-цифровые преобразователи, входы которых связаны с выходами трансформаторов тока на вводах основного и резервного источников питания, трансформаторов напряжения, включенными до вводных выключателей в цепях основного и резервного источников питания, и с трансформаторами напряжения на шинах основного и резервного источников питания, выходы же указанных аналого-цифровых преобразователей через блоки преобразования аналоговых сигналов в дискретные подключены к входам блоков определения минимального тока, блоков определения направления мощности прямой последовательности, блоков определения минимального напряжения основного и резервного источников питания, блоков определения угла сдвига фаз между основным и резервным источником питания, выходы первых двух подключены к логическим блокам И, сюда же подключены выходы последних двух через логические блоки ИЛИ, выходы блоков И соединены с первым и вторым входами блока управления, третий вход блока управления соединен с блоком дискретных сигналов и констант, четвертый вход соединен с блоком индикации, пятый и шестой входы соединены соответственно с реле защиты, седьмой и восьмой входы соединены с блок-контактами и ключами управления соответственно основного и резервного источников питания, девятый вход блока управления соединен с блок-контактами и ключом управления секционного выключателя, при этом блок управления подает сигнал на отключение выключателя основного (резервного) источника питания и от блок-контактов последнего подает сигнал на включение секционного выключателя.
На рис.3 представлена принципиальная схема предлагаемого устройства автоматического включения резервного электропитания потребителей, согласно [2].
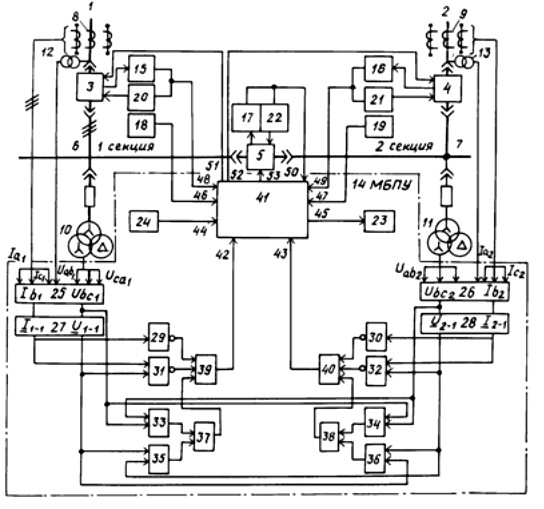
Рисунок 3 – Принципиальная схема автоматического включения резервного электропитания потребителей
Согласно [2], устройство содержит основной 1 и резервный 2 источники питания, вводные выключатели рабочих вводов 3 и 4, секционный выключатель 5, шины подстанции 6 и 7, трехфазные трансформаторы тока 8, 9 на вводах основного и резервного источников питания и трансформаторы напряжения: 10, 11 – на шинах основного и резервного источников питания, 12, 13 – включенные до вводных выключателей; быстродействующее пусковое устройство 14, блок-контакты 15, 16 вводных выключателей основного и резервного источников питания, 17 – секционного выключателя, реле защиты 18, 19 на управляемые выключатели 3 и 4, управляемые ключи включения-отключения 20, 21 вводных выключателей основного и резервного источников питания, 22 – секционного выключателя. Быстродействующее пусковое устройство 14 содержит блок индикации 23, блок дискретных сигналов и констант 24, аналого-цифровые преобразователи 25, 26, входы которых связаны с выходами трансформаторов тока 8, 9 в цепях основного 1 и резервного 2 источников питания, трансформаторов напряжения 12, 13 до вводных выключателей 3, 4 в цепях основного 1 и резервного 2 источников питания, трансформаторов напряжения 10, 11 основной и резервной секции, выходы же указанных аналого-цифровых преобразователей 25, 26 через блоки преобразования дискретных измерений в действующие комплексные значения 27, 28 подключены к входам блоков определения минимального тока ввода каждой секции 29, 30, блокам определения направления мощности прямой последовательности 31, 32, блокам определения минимального напряжения 33, 34 основного 1 и резервного 2 источников питания, блокам определения угла сдвига фаз 35, 36 между основным и резервным источником питания. Выходы блоков определения минимального тока 29, 30 подключены к логическим блокам И 39, 40, сюда же подключены выходы блоков определения направления мощности прямой последовательности 31, 32 и через логические блоки ИЛИ 37, 38 подключены выходы блоков определения минимального напряжения 33, 34 и выходы блоков определения угла сдвига фаз 35, 36. Выходы блоков И 39, 40 соединены с блоком управления 41: первый 42 и второй 43 входы, третий вход 44 блока управления 41 соединен с блоком дискретных сигналов и констант 24, четвертый вход 45 соединен с устройством индикации 23, пятый 46 и шестой 47 входы блока управления 41 соединены соответственно с реле защиты 18, 19 основного 1 и резервного 2 источников питания, седьмой 48 и восьмой 49 входы соединены с блок-контактами и ключами управления 15, 20 и 16, 21 соответственно основного 1 и резервного 2 источников питания, девятый 50 вход соединен с блок-контактами и ключом управления 17, 22 секционного выключателя 5, десятый-двенадцатый выходы 51–53 реализуют каналы управления (в случае выполнения их на базе IGBT-транзисторов) выключателями рабочих вводов 3 и 4 и секционного выключателя 5.
Первичные обмотки трансформаторов тока 8 и 9 подключены к вводам источников питания 1, 2. Первичные обмотки трансформаторов напряжения 10, 11 подключены к шинам подстанции 6, 7, трансформаторов напряжения 12, 13 включены на линейное напряжение до вводных выключателей. С помощью трансформаторов 10 и 11 также снимаются напряжения нулевой последовательности на каждой секции подстанции, что необходимо для реализации дополнительной функции устройства – контроля неисправности напряжения.
Устройство работает следующим образом. С помощью трансформаторов напряжений 10 и 11 снимаются линейные или фазные (по выбору) напряжения на первой (Uab1, Ubc1, Uca1) и второй (Uab2, Ubc2, Uca2 ) взаимно-резервируемых секциях распределительного устройства питания. С помощью трансформаторов тока 8 и 9 осуществляются непрерывные измерения мгновенных значений фазных токов на первом (Ia1, Ib1, Ic1) и втором вводах (Ia2, Ib2, Iс2). Результаты измерений поступают в блоки аналого-цифровых преобразователей 25 и 26, где происходит преобразование непрерывных значений токов и напряжений в ряды дискретных измерений с шагом дискретизации 1200 Гц (24 точки на период частоты сети).
Дискретные ряды измерений поступают в быстродействующее пусковое устройство 14, где в блоках 27 и 28 происходит преобразование результатов дискретных измерений в действующие комплексные значения токов на вводах (I1) и напряжений U1 на секциях подстанции. Одновременно от блока дискретных сигналов и констант 24 в быстродействующее пусковое устройство 14 подаются заданные параметры уставок минимального напряжения, минимального тока, угла включения и отключения.
Быстродействующее пусковое устройство 14 преобразует действующие значения фазных токов на вводах и напряжений на секциях подстанции в комплексные действующие значения напряжений U1-1 (U2-1) и токов I1-1 (I2-1) прямой последовательности (блоки 27 и 28). Блокирующим сигналом для работы устройства является минимальный ток и направление активной мощности прямой последовательности блоки 29 и 31 (блоки 30 и 32). Для регистрации потери питания служат блоки минимального напряжения 33, 34 и угла между векторами напряжений прямой последовательности на первой U1-1 (второй U2-1) и второй U2-1 (первой U1-1 ) секциях (блоки 35, 36). Сигналы для работы устройства формируются с помощью логических блоков ИЛИ (блоки 37 и 38), И (блоки 39 и 40) и поступают в блок управления 41, который управляет работой подстанции в нормальном и аварийном режимах. При регистрации возникшего аварийного режима блок управления 41 по каналам управления 51, 53 (52, 53) производит отключение вводного выключателя 3 (4) поврежденного ввода 1 (2) и включение секционного выключателя 5. Осциллограммы и параметры режима работы подстанции сохраняются в энергонезависимой памяти и отображаются с помощью блока индикации 23.
Работа пускового органа устройства осуществляется за счет программной обработки результатов измерений. Программное обеспечение микропроцессорного пускового устройства позволяет управлять работой быстродействующего АВР в соответствии с предлагаемым алгоритмом.
Когда активные мощности ввода подстанции P1=U1-1I1-1cosφ1 или P2=U2-1I2-1cosφ2 направлены от источника в нагрузку, то устройство АВР не работает, что бы в системе электроснабжения подстанции ни происходило. В нормальном режиме сигнал на входе блоков 29 и 31, 30 и 32 блокирует с помощью элементов 39, 40 подачу сигнала на включение секционного и отключение вводных выключателей, секции подстанции работают раздельно.
Для режимов с малыми токами (на уровне помех) на вводе, когда работа блока направления активной мощности прямой последовательности не предсказуема, предусмотрена уставка минимального тока, задаваемая в блоке 24. Если ток I1-1 (I2-1) меньше Iуст, то работа устройства разблокируется так же, как при изменении направления активной мощности прямой последовательности.
В режимах, попадающих под зону действия АВР, когда активная мощность P1 (или P2 ) блоков 31 (32) меняет направление (от нагрузки к источнику), напряжение на вводе U1 < Uуст блока 33 (или U2 < Uуст блока 34) и блокирующие сигналы от выключателей 15, 16, 17 и релейной защиты 18, 19 не препятствуют работе, то блок управления 41 подает сигнал на отключение выключателя первого 3 (второго 4) ввода и от блок контактов последнего подает сигнал на включение секционного выключателя 5.
Если активная мощность P1 (или P2) блока 31 (32) меняет направление (от нагрузки к источнику), угол δ12 (δ21) блока 35 (36) между векторами напряжений прямой последовательности на первой U1-1 (второй U2-1) и второй U2-1 (первой U1-1) секциях подстанции удовлетворяет условию δ12>δуст (δ21>δуст) и блокирующие сигналы от выключателей 15, 16, 17 и релейной защиты 18, 19 не препятствуют работе, то блок управления 41 подает сигнал на отключение первого 3 (второго 4) вводного выключателя и от блок-контактов последнего подается сигнал на включение секционного выключателя 5.
Вводные 3, 4 и секционный выключатели 5 устройства снабжены IGBT-транзисторами включения-отключения и могут быть дополнены индукционно динамическим устройством ускорения, позволяющим сократить собственное время включения и отключения выключателей более чем в два раза. Индукционно динамическое устройство ускорения запасает энергию в нормальном режиме работы подстанции и с помощью устройства управления 41 по команде переключается на катушку отключения (включения) выключателей, подавая повышенное напряжение на эти катушки.
При наличии сигнала о напряжении, снимаемом до выключателя ввода с помощью блоков 12 и 13, устройство позволяет обеспечить автоматическое восстановление схемы нормального режима после возобновления электроснабжения от основного источника, если переключение будет соответствовать положению ключей включения-отключения вводных и секционных выключателей 20, 21, 22.
5. Оборудование и программное обеспечение
Быстродействующее АВР наиболее целесообразно реализовать на микропроцессорной платформе, основанной на базе современного микроконтроллера STM32F4хх, производства компании STMicroelectronics [3], включающего 32-битное ядро нового поколения ARM Cortex-M4 с тактовой частотой 168 МГц [4].
Рисунок 4 – Процессорное ядро ARM Cortex-M4
(анимация: 5 кадров, 5 циклов повторения, 180 кБ)
Ядро поддерживает такие технологии, как умножение с накоплением за один такт (single-cycle MAC), арифметика с насыщением, блок вычислений с плавающей запятой FPU (floating point unit), команды управления потоком данных SIMD (single instruction multiple data). Блок FPU совместим со стандартом IEEE 754 и позволяет процессору выполнять широкий спектр математических операций над вещественными числами.
DSP-инструкции в ядре Cortex-M4 выполняются за один такт. Больше нет необходимости использовать дополнительный DSP-контроллер для обработки сигналов, можно воспользоваться одним STM32F4xx, объединяющим обычный контроллер и DSP на одном чипе.
STM32F4хх производится по 90 нм технологии с использованием уже доказавшего свою эффективность ускорителя памяти (ART Accelerator), позволяющего работать с памятью без задержек на максимальных скоростях. Производительность на тактовой частоте 168 МГц составляет 210 DMIPS. Микроконтроллер без труда справится с цифровой фильтрацией, сверткой или преобразованием Фурье. Структура микроконтроллеров STM32F4xx представлена на рис. 5.
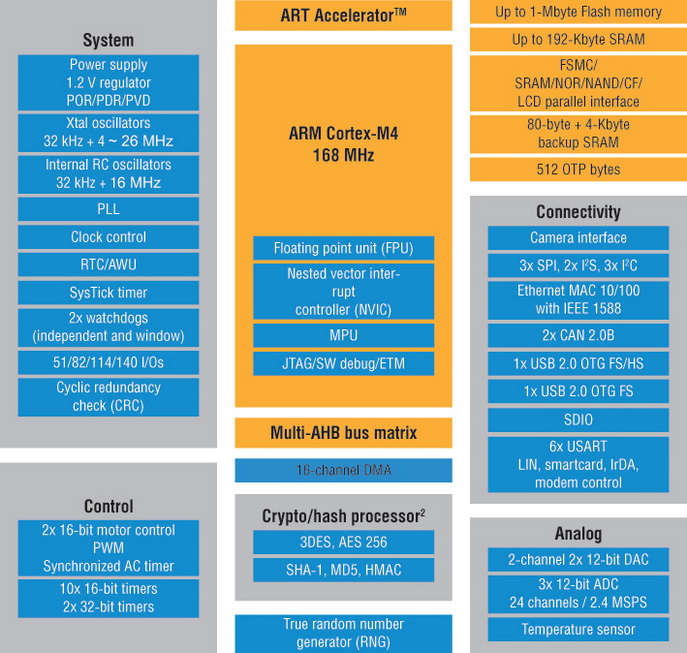
Рисунок 5 – Структура микроконтроллеров STM32F4xx
Основные характеристики STM32F4хх:
- Ядро ARM 32-bit Cortex-M4;
- Частота тактирования 168МГц, 210 DMIPS/1.25 DMIPS/МГц (Dhrystone 2.1);
- Поддержка DSP-инструкций;
- Новая высокопроизводительная AHB-матрица шин;
- 1 Mбайта Flash-памяти;
- 192 + 4 кбайт SRAM-памяти;
- Напряжение питания 1,8–3,6В (POR, PDR, PVD и BOR);
- Внутренние RC-генераторы на 16МГц и 32кГц (для RTC);
- Внешний источник тактирования 4–26МГц и для RTC – 32,768кГц;
- Модули отладки SWD/JTAG, модуль ETM;
- Три 12-бит АЦП на 24 входных канала. Скорость до 7,2 мегасемплов;
- Два 12-битных ЦАП;
- DMA-контроллер на 16 потоков с поддержкой пакетной передачи;
- 17 таймеров (16 и 32 разряда);
- Два сторожевых таймера (WDG и IWDG);
- Коммуникационные интерфейсы: I2C, USART (ISO 7816, LIN, IrDA), SPI, I2S, CAN;
- USB 2.0 FS/HS OTG;
- 10/100 Ethernet MAC (IEEE 1588v2, MII/RMII);
- Контроллер SDIO (карты SD, SDIO, MMC, CE-ATA);
- Интерфейс цифровой камеры (8/10/12/14-битные режимы);
- FSMC-контроллер (Compact Flash, SRAM, PSRAM, NOR, NAND и LCD 8080/6800);
- Аппаратный генератор случайных чисел;
- Аппаратное вычисление CRC, 96-битный уникальный ID;
- Модуль шифрования AES 128, 192, 256, Triple DES, HASH (MD5, SHA-1), HMAC;
- Расширенный температурный диапазон -40...105°C.
При разработке программного обеспечения для микроконтроллера будет использоваться связка программ MDK Keil [5] + Matlab [6] + STM32MatTarget [7]. Использование пакета дополнения STM32MatTarget для программного обеспечения Matlab/Simulink позволяет более быстро, а главное качественно реализовать алгоритм быстродействующего АВР на базе микроконтроллера STM32F4xx.
Пакет дополнения STM32MatTarget содержит блоки для настройки параметров: портов и АЦП, считывания и записи данных, таймеров и прерываний (рис. 6). Данные блоки позволяют реализовать большинство задач и систем устройств.
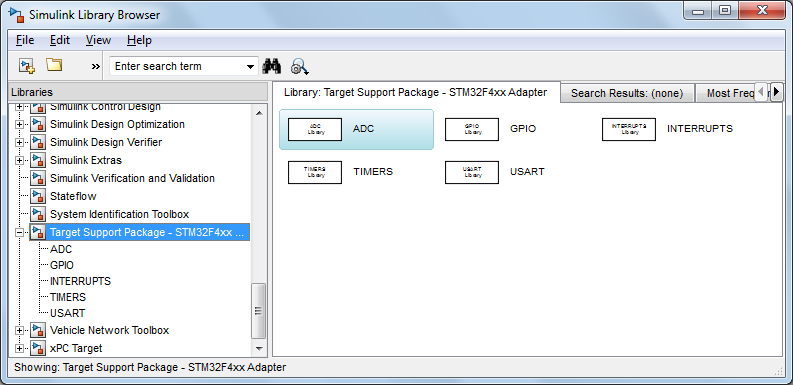
Рисунок 6 – Блоки пакета дополнения STM32MatTarget программного обеспечения Matlab/Simulink
Выводы
- Рассмотрена математическая модель для оценки возможности обеспечения непрерывности технологического процесса.
- Рассмотрен способ выполнения быстродействующего АВР в схемах электроснабжения с асинхронными двигателями.
- Применение описанного устройства, в сочетании с современными быстродействующими выключателями, при потере питания на секции по любой причине позволит выполнить переключение питания на резервный источник за минимально возможный промежуток времени и исключить несинхронную подачу напряжения на выбегающие двигатели, что в значительной степени уменьшает уровень и длительность протекания пусковых токов двигателя.
- Предложено реализовать алгоритм быстродействующего АВР на базе микроконтроллера STM32F4хх с использованием связки программ MDK Keil + Matlab + STM32MatTarget.
При написании данного реферата магистерская работа еще не завершена. Информация приведенные выше, может отличаться от информации и полученных результатов, приведенных в тексте выполненной магистерской работы, которая будет завершена в январе 2015 г. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Муратбакеев Э.Х. Обоснование структуры и параметров многоуровневой системы электроснабжения объектов нефтедобычи с секционированием участков электрической сети – Санкт-Петербург, 2009
- Патент на изобретение 2326481(13)C1, Российская федерация, МПК H02J 9/06 Способ автоматического включения резервного электропитания потребителей и устройство для его осуществления / Цырук С.А., Гамазин С.И., Пупин В.М., Козлов В.Н., Павлов А.О.; заявитель и правообладатель Государственное образовательное учреждение высшего профессионального образования «Московский энергетический институт (технический университет)» (ГОУВПО «МЭИ(ТУ)»). – №2006139086/09; заявка 07.11.2006; опубл. 07.11.2006
- Официальный сайт компании STMicroelectronics [Электронный ресурс]. – Режим доступа: http://www.st.com/
- Официальный сайт компании ARM®Holdings [Электронный ресурс]. – Режим доступа: http://www.arm.com/...
- Официальный сайт Keil uVision [Электронный ресурс]. – Режим доступа: http://www.keil.com
- Пакет дополнения STM32MatTarget [Электронный ресурс]. – Режим доступа: http://www.st.com/...
- Официальный сайт MathWorks [Электронный ресурс]. – Режим доступа: http://www.mathworks.com/...