
Реферат по теме выпускной работы
Содержание
- Введение
- 1 Развитие монорельсового транспорта
- 2 Анализ предыдущих исследований по теме работы
- 3 Актуальность темы
- 4 Цель и задачи
- 5 Исследования параметров подвесного состава
- 5.1 Математическая модель движения
- 5.2 Принятые допущения
- 5.3 Построение движения при заданных параметрах в системе Mathcad
- Выводы
- Список источников
Введение
В развитых странах очень широко используется подвесной монорельсовый транспорт. С его помощью решаются проблемы надземной развязки транспортных потоков. Зарубежная и отечественная практика показывает успешные результаты в применении монорельсового транспорта не только как надземного, но и как подземного. При эксплуатации в шахте монорельсового транспорта разрешаются или упрощаются задачи при перевозке людей и вспомогательных материалов по выработкам. Особенным его достоинством является практичность в применении и безопасность.
Используют две системы монорельсовых дорог: с канатной и локомотивной тягой. Из них следует отдать предпочтение второй, так как она обеспечивает очень высокую безопасность. Также при эксплуатации дорог с канатной тягой возникает проблемы возможности работы на разветвленных линиях и перевозок на дальние расстояния.
Сейчас начали внедрять новшества, которые обеспечивают безопасную работу горняков. Внедрение монорельсового транспорта позволило резко сократить объемы ручного труда на доставочных работах, уменьшить травматизм, связанный с перегрузками, прицепными устройствами подвижного состава, маневрами на разминовках, обрывами каната, сходом транспортных сосудов с рельсового пути, решить проблему доставки людей к месту ведения работ и обратно до выхода на поверхность. Благодаря перевозке людей по горным выработкам монорельсовой дорогой, с соблюдением четкого графика доставки, теперь рабочим нет необходимости идти пешком или ехать на средствах, не предназначенных для перевозки людей. Применение монорельсовых дизелевозов в монтажных камерах позволило резко сократить сроки и снизить трудоемкость монтажно–демонтажных работ.
Монорельсовая дорога – это транспортная система, в которой вагоны перемещаются по балке–монорельсу, установленной на отдельных опорах или эстакаде. Однако такое определение слишком расплывчато. Реально монорельсовые дороги подразделяются на ряд очень специфических разновидностей, общее между которыми – только монорельс.
1 Развитие монорельсового транспорта
Первое упоминание омонорельсе появилось в 1820 году в России. Тогда житель села Мячково в Подмосковье Иван Эльманов построил «Дорогу на столбах» – по верхнему продольному брусу катились вагонетки, которые тянули лошади. Немногим позже, независимо от русского изобретателя, монорельс схожей конструкции был изобретён в Великобритании Генри Робинзоном Пальмером. Он запатентовал своё изобретение 22 ноября 1821 года. В 1824 году в Великобритании был построен первый действующий монорельс. Он использовался на военно–морской верфи исключительно для перевозки грузов. Первый пассажирский монорельс в мире был открыт 25 июня 1825 года.
После этого в течение примерно полувека ничего нового в области строения монорельса не происходило. Попытки создать работоспособный монорельс, теперь уже на паровой тяге, возобновились в конце XIX века. Известно, что в 1872 году на политехнической выставке в Москве демонстрировался участок монорельсовой дороги конструкции инженера Лярского.
В общем в конце XIX века монорельс был частым гостем на разнообразных выставках. В 1872 году монорельс на кабельной тяге демонстрировался в Лионе, в 1891 году в Сент–Луисе демонстрировался монорельс с вагонами наподобие трамвайных.
В то же время создание действующего, работоспособного монорельса оказалось гораздо более сложным делом. В XIX веке было создано огромное количество конструкций монорельса, но большинство из них так и остались на бумаге, а те, которые были реализованы, не отличались долголетием. В 1878 году начал действовать паровой монорельс, соединяющий Брадфорд и Гилмор (Пенсильвания). Его длина составляла 6,4 км. Этот монорельс создавался для перевозок промышленного оборудования, но он также перевозил пассажиров. Брадфордский монорельс закрылся вскоре после случившейся 27 января 1879 года серьёзной катастрофы, когда погиб машинист монорельса и три его пассажира.
С развитием электротехники на монорельсах стали использовать электрический привод. Одна из первых электрических монорельсовых дорог, известная как Enos Electric Railway, была построена в 1887 году в Гринвилей, Нью–Джерси.
Как уже было указано выше, несмотря на активные поиски, создать монорельс, способный быть полноценным транспортным средством, в XIX веке так и не удалось. Единственный успешный монорельс той эпохи – построенный в Ирландии в 1888 году монорельс, соединявший Баллибунион и Листоуэл. Он просуществовал до 1924 года. Однако распространения эта конструкция не получила.
Первые монорельсы на конной тяге были подвесными. Паровые монорельсы имели своеобразную полуподвесную конструкцию: состав опирался на несущий рельс, стабильность обеспечивалась боковыми направляющими рельсами. Поперечный разрез такого пути напоминал букву «А», где верхняя точка соответствует несущему рельсу, а точки соединения боковых сторон и поперечной перекладины – направляющим. С появлением электрических монорельсов снова стала использоваться подвесная компоновка.
Однако предлагались и более необычные конструкции. В 1894 году в США была построена монорельсовая железная дорога Boynton Unicycle Railway. На этой дороге поезд опирался на один несущий рельс, сверху же проходил поддерживающий деревянный рельс. Основным недостатком такой дороги было то, что на поворотах из–за инерции («центробежной силы») на поддерживающий рельс действовали высокие силы.
В конце XIX века появились опорные монорельсы. В 1886 году в США был построен опытный монорельс такого типа, Meigs Monorail, но в те времена распространения такая конструкция не получила. Появившаяся в Америке система капитана Мейгса составляется из двух рельсов, расположенных один над другим отвесно и поддерживаемых металлическими колоннами. В основание этой системы положена идея сосредоточения всего давления, передаваемого на путь подвижным составом, в осевой линии поезда. Каждый вагон покоится на паре поворотных тележек, поддерживаемых двумя направляющими горизонтальными колёсами и четырьмя наклонными колёсами, с клиновидными желобами по ободу. Последние катятся на двух рельсах квадратного сечения, прикреплённых к нижним поясам решетчатых балок, образующих нижнее строение пути. Горизонтальные колеса локомотива служат, вместе с тем, для передачи движения, а потому эти колеса, для увеличения давления, прижимаются особыми приспособлениями к рельсам.
2 Анализ предыдущих исследований по теме работы
Тяговое устройство монорельсового состава позволяет реализовать силу тяги и торможения (в некоторой степени) за счет фрикционной связи приводных колес с монорельсом, которые могут располагаться под монорельсом или сбоку. Для шахтных условий, когда требуются значительные усилия прижатия, более предпочтительным является установка с вертикальной осью вращения и принудительным прижимом к вертикальной стенке монорельса по обе стороны. Подобная схема использована в отечественных составах ДМВ–7,2–ДМД, а также зарубежных – "Шарф"DZ 66–3",
ZL – 90 (ПНР) [25], где используется электрический, гидравлический или пневматический приводы [3].
Указанные машины позволяют создать универсальный транспорт, особенно для вспомогательных грузов угольных шахт. При этом транспортирование может осуществляться без перегрузов и перецепов на значительные расстояния (до 4...6 км). В этом направлении проведен ряд работ.
Наиболее подробно результаты научных исследований по созданию монорельсовых составов приводятся в работах B.C. Берсенева [4], посвященных разработке теоретических основ тяговых устройств с автоматическим регулированием давления приводных колес на рельс в зависимости от сопротивления движению поезда.
Исследованы особенности уравновешивания нормальных реакций рельса, приложенных к приводным колесам, принимая во внимание, что сила тяжести всего тягового устройства во много раз меньше этих реакций, рассмотрены условия, при которых обеспечивается равновесие, исследовано влияние собственных сопротивлений тягового механизма на процесс создания тягового усилия. Исходя из характера и соотношения внешних сил, определены особенности механизма.
Дано описание типов тяговых устройств, проанализированы особенности работы различных конструкций, даны методы расчета и определены коэффициенты полезного действия.
Как указано автором, в работе [5] не рассматриваются вопросы вписывания тягового устройства в закругления пути, а также не учитывается его боковое раскачивание, которое неизбежно возникает при движении по монорельсу. В работах Л.И. Айзенштока [1, 2] приведены результаты исследования профиля монорельсового пути как источника колебаний подвижного состава и установлены аналитические зависимости возмущений и их параметры. Определены факторы, влияющие на величины боковых отклонений монорельсового состава
Однако в этих работах не учитывается влияние места расположения и степени прижатия приводных колес состава к монорельсу.
Направлением работ А.С. Веткина явились исследования процесса вписывания подвижного состава. Полученные закономерности не могут быть использованы для определения параметров тягового устройства, так как они относятся к прицепной части состава. Следует отметить, что, невзирая на большое количество публикаций, посвященных вопросам создания монорельсовых составов, опубликованных в советской и зарубежной литературе, не существует определенной методики, позволяющей однозначно определить основные параметры монорельсовых дорог. Первые попытки в обобщении этих вопросов принадлежат В.Н. Григорьеву. На основании широких исследований им выявлены основные конструктивные схемы тяговых устройств, определены рациональные области применения монорельсовых дорог, рассмотрены вопросы влияния конструктивных особенностей монорельсового состава на параметры движения, о возможной скорости движения поезда и достаточной мощности состава, а также о способе регулирования привода.
Исследования, проведенные Л.Г. Желтухиным, посвящены нахождению оптимальных параметров подвешивания подвижного состава шахтной подвесной монорельсовой дороги, выявлению характера взаимодействия вагонетки со стыками монорельса. В указанных работах не отражены вопросы взаимодействия приводных колес тягового устройства с монорельсом, а это не позволяет их использовать в настоящей работе. На основании анализа конструкций монорельсовых тягачей З.М.Мерецким выявлены основные требования к их конструкциям, определен рациональный тип привода.
Проведенные исследования М.В. Чашко посвящены созданию рудничных монорельсовых составов с линейным индукционным двигателем. Как показали исследования, целесообразно применять на скоростях, значительно больших, чем 2 м/с, что в настоящий момент для шахтных условий является сложным. При этом требуется такое состояние рельсового пути, где профиль не имел бы резких перегибов и превышений в стыках. Основным достоинством состава с линейным двигателем является то, что его тяговое усилие не зависит от коэффициента сцепления приводного элемента с рельсовым путем. Коэффициент сцепления – величина непостоянная, зависящая от многих условий. 3 настоящее время существует много гипотез, объясняющих физический процесс реализации тягового усилия приводными колесами. Однако, все они противоречивы и не позволяют определить значение расчетным путем, то есть чисто теоретически. Для тяговых расчетов принято использовать экспериментальные данные. В ранее указанных работах приведены результаты исследований коэффициента сцепления приводных колес с монорельсом, причем каждый из авторов дает его значение реально для индивидуального эксперимента, не проводя соответствующей статистической обработки, не учитывая внешних условий, влияющих на значение этого коэффициента. В связи с этим, указанные значения могут быть использованы в малой степени в качестве обобщенных для тяговых расчетов при различных условиях эксплуатации монорельсовых дорог. Наиболее широко проблемы применения монорельсовых дорог в промышленности изложены в работах[2]. Приведенные данные применимы для транспортных средств, работающих в стабильных условиях, но для тяжелого состояния транспортной дороги, присущего угольным шахтам, нуждаются в проверке и подлежат уточнению. Кроме этого, в указанных работах не приведены рекомендации по выбору жесткой базы тягового устройства, диаметра и числа приводных колес, а также типа прижимного устройства.
Определенный интерес представляют работы института ВНИИгидроуголь, посвященные созданию подвесных монорельсовых составов с дизельным приводом. За период с 1967 года по 1977 год разработаны три типа дизелевозов ДМВ, которые имеют тяговое усилие 7, 30 и 55 кН. Последний (ДМВ–7) имеет мощность 55,7 кВт и предназначен для доставки грузов массой до 7 т по выработкам с углами наклона до 35°. В описанных работах основным направлением является создание тягового устройства с объемным гидроприводом и недостаточно проработан вопрос о непосредственной связи тягового блока с монорельсом, разработан ряд методик, позволяющих в широких пределах производить выбор параметров. Однако для обоснованного создания завершенной конструкции монорельсового состава их недостаточно.
Задачу о перевернутом тяговом устройстве (маятнике) с вибрирующей точкой подвеса принято называть задачей Капицы. В его работах [6, 7] на основе приближенного решения теоретически обосновано, что, начиная с некоторой определенной частоты вертикальных колебаний точки подвеса, Тяговое устройство становится устойчивым в своем верхнем положении. Более того, П.Л. Капица предложил механическую конструкцию для демонстрации описанного эффекта, получив тем самым экспериментальное подтверждение своего результата. Однако, еще задолго до Капицы в 1908 году английский математик A. Stephenson также рассматривал такую задачу [8,9]. Им было показано, что достаточно просто удерживать шест в вертикальном положении, вибрируя точку опоры по вертикали, а не перемещая ее из стороны в сторону, как это обычно делают, в горизонтальной плоскости. Следует отметить также еще более ранний результат, представленный в книге лорда Рэлея [10], о потере устойчивости нижнего положения равновесия при горизонтальных колебаниях подвеса с определенной частотой. В 1950 году, за год до выхода статей [6,7], Н.Н. Боголюбов в своей работе [11] излагает теорию метода усреднения, следуя монографиям [12,13], максимально приспосабливая его для практических применений. Здесь также встречается пример нашего устройства с вибрирующей точкой подвеса и для него получена оценка частоты, гарантирующей устойчивость верхнего положения тягового устройства, совпадающая с результатом П.Л. Капицы. Однако оба ученых пришли к этому результату независимо и разными методами. Несомненная заслуга П.Л. Капицы состоит в том, что он экспериментально продемонстрировал эффект вибрационной стабилизации, что породило повышенный интерес к данной задаче, и количество работ, посвященных этой тематике, возросло многократно.
До 1950 г. можно отметить работы немецких ученых, исследовавших движение тягового устройства при быстрых вибрациях точки подвеса с малой амплитудой по вертикали [14], по горизонтали [15], а также в произ¬вольном направлении [16]. Анализ устойчивости верхнего положения тягового устройства при колебаниях точки подвеса вдоль произвольно выбранной оси был выполнен И.Г. Малкиным [17]. Более сложные траектории движения подвеса были предложены в монографиях [18,19], где рассматривались перемещения не только по вертикали или вдоль наклонной прямой, но также и эллиптические траектории. При этом в работе [18] был разработан аппарат вибрационной механики на основе методов усреднения и введено понятие квазиравновесия колебательных систем, обозначающее стационарность медленной составляющей решения таких систем. Строгий анализ устойчивости относительных положений равновесия тягового устройства на вертикали в нелинейной постановке при гармонических вертикальных вибрациях точки подвеса произвольной частоты и амплитуды был выполнен в работе [20]. В монографии [21] были предложены алгоритмы низкочастотной линейной стабилизации, которые позволили обнаружить эффект низкочастотной стабилизации систе¬мы линейного приближения тягового устройства в верхнем положения. В работе [22] исследовано влияние вязкого трения на величину критической частоты стабилизации верхнего положения равновесия.
Следует отметить также ряд обобщений задачи Капицы на двойной [23–25], N–звенный [26,28], а также на сферический маятники [29–30].
В настоящей работе исследуется возможность с помощью управления дви¬жением точки подвеса обеспечить равновесие тягового устройства в произвольном наперед заданном наклонном положении либо колебание со сколь угодно малой амплитудой относительно выбранного положения.
3 Актуальность темы
Вопрос о монорельсовых дорогах, особенно с локомотивной тягой является одной из распространённых, развивающихся тем докладов, научных работ, исследований в наше время. Монорельсовые дороги играют важную роль в развитии горной промышленности во всём мире. Но не все страны могут внедрять новейшие установки в промышленность, также вся система имеет множество недоработок. Если не развивать и не улучшать характеристики эксплуатации данного вида транспорта, то потеряв свою ценность, его перестанут использовать. Множество ученых сделали свой ценнейший вклад в развитие монорельсового транспорта. Некоторые из них: Докт. техн. наук B.C. Берсенев, канд. техн. наук Л.И. Айзеншток, А.С Веткин, Л.Г. Желтухин, В.Н. Григорьев, В.В. Бухановский и другие. Наиболее подробно результаты научных исследований по созданию монорельсовых локомотивов приводятся в работах B.C. Берсенева. Основным направлением работ А.С. Веткина явились исследования процесса вписывания подвижного состава. Полученные закономерности не могут быть использованы для определения параметров тягового устройства, так как они относятся к прицепной части состава. Следует отметить, что, невзирая на большое количество публикаций, посвященных вопросам создания монорельсовых локомотивов, опубликованных в советской и зарубежной литературе, не существует определенной методики, позволяющей однозначно определить основные параметры монорельсовых дорог. Первые попытки в обобщении этих вопросов принадлежат В.Н. Григорьеву. На основании широких исследований им выявлены основные конструктивные схемы тяговых устройств, определены рациональные области применения монорельсовых дорог, рассмотрены вопросы влияния конструктивных особенностей монорельсового локомотива на параметры движения, о возможной скорости движения поезда и достаточной мощности локомотива, а также о способе регулирования привода.
4 Цель и задачи
Цель работы – обосновать параметры монорельсового состава для проектирования устройства предотвращающего боковое раскачивание, что обеспечит повышение скоростей передвижения составов и увеличит срок службы систем подвешивания и предотвратит искривление пути монорельса.
Для достижения данной цели поставлены следующие основные задачи:
• установить основные факторы, влияющие на раскачивание;
• составить математическую модель движения монорельсового состава;
• обосновать параметры подвесного монорельсового пути.
Практическая ценность данной работы состоит в возможности более широкого применения монорельсового транспорта для вспомогательных работ на горном предприятии, увеличения скорости движения имеющихся монорельсовых составов.
5 Исследования параметров подвесного состава
5.1 Математическая модель движения
Рассмотрим плоское движение экипажа, состоящего из материальной точки массы m и невесомого стержня длины  , на котором подвешена эта точка, в поле силы тяжести. При этом точка подвеса не закреплена, а может двигаться по некоторой (заданной или выбираемой) траектории. Предполагается отсутствие каких–либо сил трения и сопротивления. Положение экипажа будем определять углом
, на котором подвешена эта точка, в поле силы тяжести. При этом точка подвеса не закреплена, а может двигаться по некоторой (заданной или выбираемой) траектории. Предполагается отсутствие каких–либо сил трения и сопротивления. Положение экипажа будем определять углом  . Пусть задано некоторое положение
. Пусть задано некоторое положение  в котором он находится в начальный момент с нулевой угловой скоростью. Задача состоит в нахождении закона движения точки подвеса , не позволяющего экипажу изменять положение с течением времени, т.е. обеспечить существование решения
в котором он находится в начальный момент с нулевой угловой скоростью. Задача состоит в нахождении закона движения точки подвеса , не позволяющего экипажу изменять положение с течением времени, т.е. обеспечить существование решения  .
.
Уравнение движения (рис. 5.1) при перемещении точки подвеса по закону  имеет вид
имеет вид
 (1)
(1)
Важный частный случай возникает, когда точка подвеса колеблется вдоль некоторой оси, образующей угол  с направлением силы тяжести. Обозначив смещение точки подвеса вдоль этой оси
с направлением силы тяжести. Обозначив смещение точки подвеса вдоль этой оси  , имеем
, имеем
.jpg) (2)
(2)
и уравнение колебаний экипажа (1) преобразуется к виду
 (3)
(3)
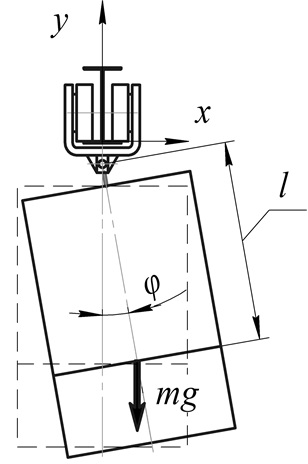
Рисунок 5.1 – Расчетная схема движения экипажа
Так как верхнее  и нижнее
и нижнее  вертикальные экипажа являются положениями равновесия при неподвижном подвесе
вертикальные экипажа являются положениями равновесия при неподвижном подвесе  , то исключим их из дальнейшего рассмотрения и будем предполагать, что
, то исключим их из дальнейшего рассмотрения и будем предполагать, что  . Отметим лишь, что для сохранения вертикальных положений равновесия экипажа точка подвеса может перемещаться лишь вдоль оси Oy. Как следует из [4], верхнее положение становится устойчивым при колебаниях подвеса вдоль вертикали с частотой выше
. Отметим лишь, что для сохранения вертикальных положений равновесия экипажа точка подвеса может перемещаться лишь вдоль оси Oy. Как следует из [4], верхнее положение становится устойчивым при колебаниях подвеса вдоль вертикали с частотой выше  , где – амплитуда этих колебаний.
, где – амплитуда этих колебаний.
Условия существования равновесий. Попытаемся найти движение точки подвеса такое, что  . Функции x(t) и y(t) могут рассматриваться как управления в уравнении (1). В качестве класса допустимых управлений рассмотрим непрерывные дважды дифференцируемые функции. Тогда, учитывая
. Функции x(t) и y(t) могут рассматриваться как управления в уравнении (1). В качестве класса допустимых управлений рассмотрим непрерывные дважды дифференцируемые функции. Тогда, учитывая  уравнение (1) преобразуем к виду
уравнение (1) преобразуем к виду 
Откуда
 (4)
(4)
где  - некоторые константы, которые определяются из начальных значений скорости и положения подвеса экипажа.
- некоторые константы, которые определяются из начальных значений скорости и положения подвеса экипажа.
Выбрав произвольным образом x(t) из класса допустимых функций, из (4) получим y(t), определив тем самым полностью движение точки подвеса. Таким образом, имеем семейство управлений x(t), y(t), обеспечивающих наклонное равновесие экипажа. Выясним, существуют ли среди них ограниченные.
Пусть x(t) – ограниченная на полуинтервале  функция. Тогда при
функция. Тогда при  в силу ограниченности x(t) величина
в силу ограниченности x(t) величина  согласно (4) стремится к бесконечности. Следовательно, движение подвеса при
согласно (4) стремится к бесконечности. Следовательно, движение подвеса при  не может быть ограниченным по обеим координатам. Тем не менее возможен режим движения ограниченный по y и неограниченный по x, позволяющий экипажу оставаться в наклонном положении (например,
не может быть ограниченным по обеим координатам. Тем не менее возможен режим движения ограниченный по y и неограниченный по x, позволяющий экипажу оставаться в наклонном положении (например,  ).
).
Упростим теперь траекторию движения подвеса. Будем перемещать точку подвеса по прямой (2), но расширим класс допустимых функций s(t). Этот класс будет включать функции, первые производные которых (скорости) могут иметь разрывы первого рода в некоторых точках. На промежутках между этими точками функции s(t) будут, как и раньше, дважды дифференцируемыми. В указанных точках разрыва рассматриваемая механическая система будет подвергаться импульсному воздействию.
Дальнейший расчет зависимостей расписан в работе [5], отсюда имеем, что при .jpg) знак
знак .jpg) совпадает со знаком
совпадает со знаком .jpg) , а при
, а при  – со знаком
– со знаком .jpg) . Эти знаки различны, поскольку выполнено неравенство
. Эти знаки различны, поскольку выполнено неравенство  . Значит, в силу непрерывной зависимости
. Значит, в силу непрерывной зависимости  от
от  существует некоторое значение
существует некоторое значение  , при котором приращение скорости за период T будет равно нулю.
, при котором приращение скорости за период T будет равно нулю.
Теперь рассмотрим приращение s(t), оно будет равно  . Очевидно, что в зависимости от начального значения скорости
. Очевидно, что в зависимости от начального значения скорости  , мы можем получить различные приращения
, мы можем получить различные приращения  . Выберем начальную скорость так, чтобы это приращение равнялось нулю. Обозначим
. Выберем начальную скорость так, чтобы это приращение равнялось нулю. Обозначим  Тогда, выбрав начальную скорость равной,
Тогда, выбрав начальную скорость равной,  получим, что приращение s(t) будет нулевым.
получим, что приращение s(t) будет нулевым.
Такие значения частоты  и начальной скорости для s(t), что координата подвеса s(t) и его скорость за период возвращаются к исходным значениям. Следовательно, при этих значениях движение подвеса s(t) будет периодическим и непрерывным по t, а маятник будет совершать колебания относительно положения
и начальной скорости для s(t), что координата подвеса s(t) и его скорость за период возвращаются к исходным значениям. Следовательно, при этих значениях движение подвеса s(t) будет периодическим и непрерывным по t, а маятник будет совершать колебания относительно положения  по закону
по закону 
Возьмем расстояние от точки центра масс точек подвеса состава длиной =800 мм и рассмотрим его горизонтальное положение  . Пусть ось, вдоль которой колеблется точка подвеса, образует угол
. Пусть ось, вдоль которой колеблется точка подвеса, образует угол .jpg) с направлением силы тяжести. Графики движения точки подвеса экипажа, обеспечивающих гармонические колебания около горизонтального положения с определенной небольшой амплитудой
с направлением силы тяжести. Графики движения точки подвеса экипажа, обеспечивающих гармонические колебания около горизонтального положения с определенной небольшой амплитудой  и график зависимости частоты
и график зависимости частоты  от при периодическом движении s(t) точки подвеса изображены на рис. 5.3а.
от при периодическом движении s(t) точки подвеса изображены на рис. 5.3а.
Рисунок 5.2 – Колебания экипажа
(анимация: 4 кадра, 8 циклов повторения, 49,2 кб)
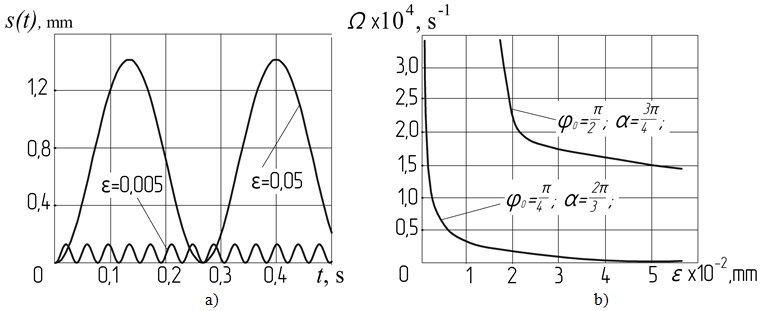
Рисунок 5.3 – Движение подвеса а) s=f(t) при  ; б) график частоты
; б) график частоты  .
.
На рис. 5.3б приведен график зависимости частоты от при периодическом движении s(t) точки подвеса. Из него видим, что частота  неограниченно возрастает при уменьшении амплитуды .
неограниченно возрастает при уменьшении амплитуды .
5.2 Принятые допущения
Скорость движения принимается постоянной; колея ходовых колес, ввиду ее малости, полагается равной нулю; рама с приводом и масса экипажа расположена по центру рассматривается как твердое тело, имеющее продольную плоскость симметрии и двухточечную систему подвески; неуравновешенность и гироскопические моменты вращающихся масс трансмиссии и двигателя равны нулю; приводные колеса прижимаются к вертикальной стенке монорельса с усилием, прямо пропорциональным коэффициенту жесткости прижимного механизма.
5.3 Построение движения при заданных параметрах в системе Mathcad
При построении математической модели были использованы следующие начальные условия , приведенные в рис 4.4.
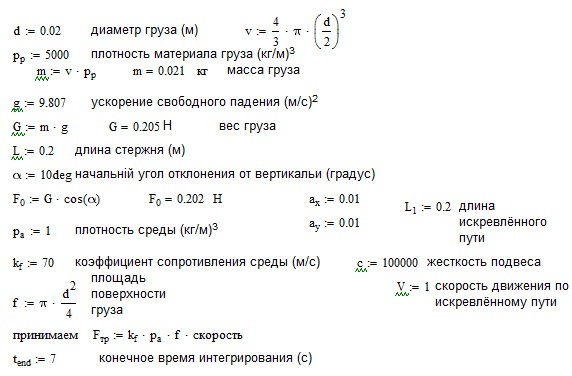
Рисунок 5.4 – Начальные условия с принятыми допущениями.
После подставления начальных условий в тело программы получили следующие графики – отображающие движение тела по осям X,Y и указанием силы натяжения возникающей в части крепления состава рис. 5.5, а также X,Y,Z рис. 5.6.
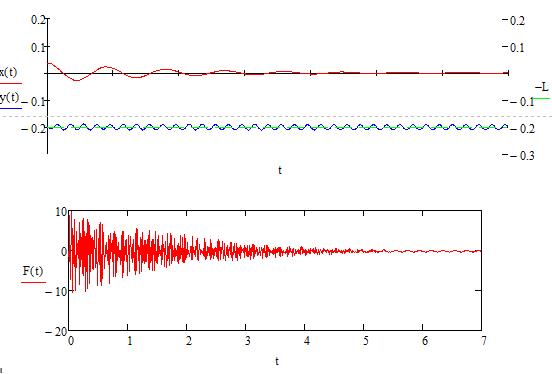
Рисунок 5.5 Графическое отображение движения и возникающей силы натяжения.
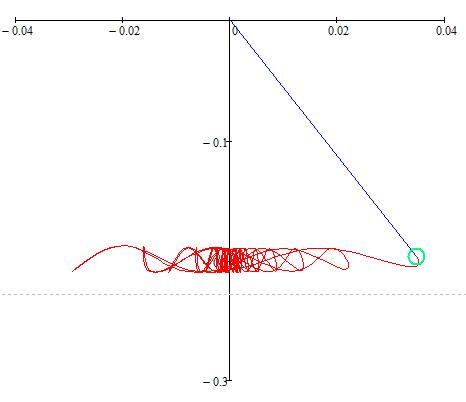
Рисунок 5.6 Графическое отображение боковых отклонений.
Аналогичные расчеты проведем для первоначального отклонения в диапазоне от 0 до 10 градусов и массой 210 кг. Сила F возникающая в системе подвешивания экипажа при увеличении начального отклонения экипажа уменьшается.

Выводы
На основании проведенного анализа уравнения раскачивания экипажа при движении по монорельсу можно сделать вывод, что существуют периодические по времени колебания точки подвеса, при которых отклонения экипажа от заданного фиксированного наклоненного положения могут быть сколь угодно малыми.
При написании данного реферата магистерская работа не завершена. Окончательный вариант работы можно получить у автора или научного руководителя после декабря 2014 года.
Список источников
- Айзеншток Л.И. Исследование динамики и обоснование параметров конструкции и условий эксплуатации шахтных скоростных монорельсовых дорог: Автореф. дис. Канд. тех. наук. – Днепропетровск, 1983. – 23 с.
- Айзеншток Л.И., Носов В.С., Слободенюк Р.Л. Исследование состояния пути шахтных монорельсовых дорог // Способы и средства безопасной эксплуатации электромеханического оборудования в шахтах. Сб. науч. тр. / МакНИИ. – 1982. – С. 61–62.
- Нос В.С., Айзеншток Л.И. О зазорах в выработках при монорельсовом транспорте // Безопасность труда в промышленности. Сб. науч. тр. / МакНИИ. – 1982. – №2. – С. 47–48.
- Шахтарь П.С. Рудничные составы. – М.: Недра, 1982. – 296 с.
- Фаворин М.В. Моменты инерции тел. – М.: Машиностроение, 1977. – 511 с.
- Капица П.Л. Динамическая устойчивость маятника при колеблющейся точке подвеса // Журн. эксперимент. и теор. физики. – 1951. – 51, № 5. – С. 588–597.
- Капица П.Л. Маятник с вибрирующим подвесом // Успехи физ. наук. – 1951. – 44. –С. 7–20.
- Stephenson A. On a new type of dynamic stability // Mem. and Proc. of the Manchester Literary and Philosophical Soc. – 1908. – 52, № 8. – P. 1–10.
- Stephenson A. On induced stability // Philosophical Magazine. – 1908. – 15. – P. 233–236.
- Стретт Дж.В. Теория звука. – М.: Гос. изд–во технико–теоретической лит., 1955. Т. 1.- 504 с.
- Боголюбов Н.Н. Теория возмущений в нелинейной механике // Сб. тр. Ин–та строител. механики АН УССР. – 1950. – 14. – С. 9–34.
- Крылов H.M., Боголюбов Н.Н. Введение в нелинейную механику. – Киев: Изд–во АН УССР, 1937. – 365 с.
- Боголюбов Н.Н. О некоторых статистических методах в математической физике. –Киев: Изд–во АН УССР, 1945. – 139 с.
- Erdelyi A. Uber die kleinen Schwingungen eines Pendels mit oszillierendem Aufhangepunkt // ZAMM. – 1934. – 14, № 4. – S. 235–247.
- Klotter K., Kotowski G. Uber die Stabilitat der Bewegungen des Pendels mit oszillierendem Aufhangeunkt // Ibid. – 1939. – 19, № 5. – S. 289–296.
- Hirsch P. Das Pendel mit oszilliererndem Aufhangepunkt // Ibi'd. – 1930. – 10, № 1. –S. 41–52.
- Жалким И.Г. Некоторые задачи теории нелинейных колебаний. – М.: Гостехиздат, 1956.- 491 с.
- Блехман И.И. Вибрационная механика. – М.: Наука, 1994. – 400 с.
- Стрижак Т.Г. Методы исследования динамических систем типа "маятник". – Алма– Ата: Наука, 1981. – 253 с.
- Бардин Б.С., Маркеев А.П. Об устойчивости равновесия маятника при вертикальных колебаниях точки подвеса // Прикл. математика и механика. – 1995. – 59, № 6. – С. 922–929.
- Леонов Г.А., Шумафов М.М. Проблемы стабилизации линейных управляемых систем.-СПб.: Изд–во С.-Петербург. ун–та, 2002. – 308 с.
- Сейранян А.А., Сейранян А.П. Об устойчивости перевернутого маятника с вибрирую¬щей точкой подвеса // Прикл. математика и механика. – 2006. – 70, № 5. – С. 835–843.
- Lowenstern E. R. The stabilizing effect of imposed oscillations of high frequency on a dynamical system // Philosoph. Magazine. – 1932. – 8. – P. 458–486.
- Hsu, C.S. On a restricted class of coupled Hill's equations and some applications //J.Appl. Mech. – 1961. – 28. – P. 551–556.
- Холостова О.В. О движениях двойного маятника с вибрирующей точкой подвеса // Изв. РАН. Механика твердого тела. – 2009. – № 2. – С. 25–40.
- Otterbein S. Stabilisierung des n–Pendels und der Indische Seiltrick // Arch. ration. Mech.Analysis – 1982. – 78. – P. 381–393.
- Acheson D.J. A pendulum theorem // Proc. R. Soc. Lond. – 1993. – A443 – P. 239–245.
- Маркеев А.П. О близких к коническим движениях сферического маятника с вибрирующей точкой подвеса // Тр. конф. «Устойчивость и колебания нелинейн. систем упр.». – 1998. – С. 107.
- Петров А.Г. Об уравнениях движения сферического маятника с колеблющейся точкой подвеса // Докл. РАН. – 2005. – 405, № 1. – С. 51–55.
- Маркеев А.П. К теории движения твердого тела с вибрирующим подвесом // Доклады Академии наук. 2009. Т. 427. № 6. С. 771–775.
- Холостова О.В. Исследование устойчивости перманентных вращений Штауде. М. –Ижевск: НИЦ «Регулярная и хаотическая динамика», 2008. – 128 с.
- SMT Scharf [Электронный ресурс] – Режим доступа: http://smtscharf.com/cms/front_content.php?lang=5&idcat=3. Дата обращения 05.11.2012.