
Реферат з теми випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження
- 3.Технологічна схема об’єкта
- 4. Моделювання вузла
- Висновки
- Список джерел
Вступ
Сьогодні вже важко уявити собі місто без працюючого вертикального транспорту. Для величезної кількості людей нормальна робота ліфтового господарства є синонімом нормального життя. Якісна робота ліфтів і підйомних механізмів та їх надійність залишається одним з ключових аспектів у справі забезпечення безпеки житлових і громадських будівель, тому необхідно безперервний розвиток і модернізація ліфтового обладнання.
Ліфт – механізм вертикального транспорту, призначений для транспортування пасажирів і вантажів у житлових і виробничих приміщеннях. Широке поширення використання ліфтового електропривода в промисловості і в повсякденному житті, визначає ліфт як найбільш поширений вид вертикального транспорту.
Видима останнім часом тенденція до підвищення поверховості будівель в містах, а також до комфорту пересування в ліфтах веде до ускладнення систем управління процесом пересування. Завдяки розвитку сучасних мікропроцесорних систем управління дані завдання успішно вирішуються в даний час.
Сучасний ліфт – це складне електромеханічний пристрій, що працює в напівавтоматичному режимі за встановленою програмою.Програма роботи ліфта визначається діями пасажирів, місцезнаходженням і положенням (вільна або зайнята) кабіни і регламентується за допомогою системи управління ліфтом.
Система керування ліфтом повинна вирішувати завдання безпечного та комфортного пересування пасажирів [1]. Пересування повинно здійсняться з допустимим прискоренням, необхідної швидкістю і відсутність відчутних ривків. Для виконання наведених вимог необхідно отримувати інформацію про становище і швидкості руху кабіни за допомогою різних датчиків.
Велику увагу необхідно приділити питанню безпеки пересування. Також слід звернути увагу на використання системи управління не тільки для модернізації існуючого ліфтового обладнання, а й використання в новому будівництві.
1. Актуальність теми
Система керування ліфтом повинна вирішувати завдання безпечного та комфортного пересування пасажирів. Пересування повинно здійсняться з допустимим прискоренням, необхідної швидкістю і відсутність відчутних ривків. Для виконання наведених вимог необхідно отримувати інформацію про становище і швидкості руху кабіни за допомогою різних датчиків і змоделювати систему контролю.
Також слід звернути увагу на використання системи управління не тільки для модернізації існуючого ліфтового обладнання, а й використання в новому будівництві. Тому тема магістерської роботи є актуальною.
2. Мета і задачі дослідження
Метою даної роботи є поліпшення динамічних характеристик системи управління ліфтом в перехідних режимах роботи.
Для досягнення поставленої мети не обходимо сформулювати основні завдання роботи:
- Розробити математичну модель системи управління ліфтом на базі ПІД регулятора.
- Синтезувати імітаційну модель даної системи.
- Досліджувати динамічні характеристики системи управління за допомогою математичної моделі.
Вимірювання поточного значення швидкості виробляється за допомогою пристрою контролю швидкості УКС-01 [2]. Обробка даних та видача сигналів управління на двигун буде проводитися за допомогою програмованого логічного контролера (ПЛК).
За допомогою герконових датчиків, що знаходяться на кожному поверсі і поверхні кабіни, будуть контролюватися процеси розгону-гальмування ліфта [3]. Також будуть встановлені наступні вимірювальні датчики і прилади:
– Прилад контролю відкриття–закриття дверей БАР’ЄР-1М [4];
– Датчик температури;
– Датчик моменту;
– Модуль логіки для контролю завантаженості кабіни КПЛ 1.1.
Для усунення аварійної ситуації при перевищенні максимального рівня завантаження кабіни на диспетчерську панель, а з неї на ліфтової індикатор надходить сигнал про перевантаження. При перевищенні безпечної швидкості кабіни надходить сигнал на ПЛК, а при його допомоги здійснюється аварійна зупинка ліфта.
3. Технологічна схема об’єкта
Опис технологічного процесу та обладнання
Основними частинами ліфта є: лебідка, кабіна, противага, напрямні для кабіни і противаги, двері шахти, обмежувач швидкості, тягові канати і канат обмежувача швидкості, вузли та деталі приямка, електрообладнання та електророзводка. Основні параметри технічної характеристики ліфта: номінальна вантажопідйомність m = 400 кг, маса противаги mпр = 1000 кг, маса порожньої кабіни m0 = 800 кг., номінальна швидкість U = 1 м/c. Ліфт дванадцятиповерхового будинку плюс поверх технічного обслуговування. Відстань між поверхами 3 м. Розрахункова робота електроприводу пуск раз в 3 хвилини, 20 разів за годину.
Рисунок 1 – Схема ліфта
Кінематична схема ліфта представлена на рис. 1.1. Ліфт має поліспастний підвіску з кратністю поліспаста 2, при якій тягові канати 1, що сходять з канатоведущего шківа 2, огинає поліспастний блок 3 на кабіні 4 і противазі 5 і кріпляться до верхнього перекриття шахти в машинному приміщенні.
Переміщення кабіни і противаги по напрямних здійснюється лебідкою 6, встановленої в машинному приміщенні, за допомогою тягових канатів 1. Там же розміщені обмежувачі швидкості, контролер, ввідний пристрій. Ліфт комплектується спеціалізованим контролером.
При натисканні кнопки викличного апарату в електроапаратуру управління ліфтом подається електричний імпульс (виклик). Якщо кабіна перебуває на зупинці, з якої надійшов виклик, відкриваються двері кабіни і шахти на даній зупинці. Якщо кабіна в іншому місці, подається команда на її рух. У обмотку електродвигуна лебідки і котушки електромагнітних гальм подається напруга, гальма відпускають, і ротор електродвигуна приходить в рух.
При підході кабіни до необхідної посадкової майданчику система управління ліфтом по сигналу датчиків точної зупинки перемикає електродвигун лебідки на роботу із зниженою частотою обертання ротора. Швидкість руху кабіни знижується, подається команда на зупинку, і в момент, коли поріг кабіни поєднується з рівнем порогу дверей шахти, кабіна зупиняється, вступає в дію гальмо, включається в роботу привід дверей, і двері кабіни і шахти відкриваються. На ліфті з системою управління від контролера відбувається безступінчате регулювання частоти обертання ротора двигуна за допомогою системи частотного регулювання, що забезпечує плавні зупинку і пуск кабіни.
При натисканні кнопки наказу на панелі управління, розташованої в кабіні, закриваються двері кабіни і шахти, кабіна відправляється на посадочний майданчик, кнопка наказу якої натиснута.
Після прибуття на необхідну посадочний майданчик і виходу пасажирів двері зачиняються, кабіна коштує до тих пір, поки не буде натиснута кнопка будь-якого викличного апарату.
Рух кабіни можливий тільки при справності всіх блокувальних і запобіжних пристроїв. Спрацювання будь-якого запобіжного пристрою призводить до розмикання ланцюга управління і зупинці кабіни.
Основу конструкції ліфта становить механізм підйому на основі застосування лебідки з канатної системою передачі руху кабіні.
Пасажири переміщуються у спеціально-обладнаній кабіні з закриваються дверима, які мають блокувальні пристрої, що виключають можливість руху при відкритих стулках.
Для центрування кабіни і противаги в горизонтальній площині і виключення поперечного розгойдування під час руху, застосовуються напрямні, що встановлюються на всю висоту шахти ліфта.
Направляючі забезпечують можливість гальмування кабіни (противаги) уловлювачами при аварійному перевищенні швидкості і утримують її до моменту зняття з уловлювачів.
Простір, у якому переміщається кабіна і противага огороджується на повну висоту і називається шахтою.
Приміщення, в якому встановлюється підйомна лебідка та інше необхідне обладнання, називається машинним приміщенням.
Частину шахти, розташована нижче рівня нижньої посадкової площадки, утворює приямок, в якому розміщуються упори або буфери, що обмежують хід кабіни (противаги) вниз і зупиняють з допустимим прискоренням уповільнення.
Для запобігання аварійного падіння кабіни (противаги) ліфт обладнується автоматичною системою включення уловлювачів від обмежувача швидкості, що спрацьовує при аварійному перевищенні швидкості.
Уловлювачі встановлюються по бічних сторонах каркаса кабіни (противаги) і приводяться в дію канатом, що охоплює шків обмежувача швидкості.
У приямку встановлюється натягач обмежувача швидкості.
Станція управління роботою ліфта, прилади та апарати перебувають у машинному приміщенні.
З’єднання електричного обладнання кабіни зі станцією управління забезпечується за допомогою підвісної кабелю і джгута проводів, змонтованого в шахті.
Датчики уповільнення, шунти датчика точної зупинки й пристрої контролю шахтних дверей також встановлюються в шахті.
На рис. 1.1 представлена схема розміщення обладнання ліфта. Лебідка і шафа управління розташовуються в ліфтовому приміщенні, закритому від проникнення сторонніх осіб.
Рисунок 1.1 – Технологічна схема обладнання
Основна плата управління встановлена в шафі контролера. Послідовна лінія передачі даних підрозділяється на канали кабіни і шахти.Канал кабіни, до якого підключена клемна коробка кабіни, являє собою підвісний кабель. На рис. 1.1 прийняті наступні позначення: 1 – шафа контролера, 2 – позиційний індикатор, 3 – поверхові кнопки, 4 – датчик положення кабіни.
4. Моделювання вузла
Отримання математичної моделі асинхронного двигуна, що лежить в основі роботи ліфта, є основою загальної моделі об’єкта.За відомим паспортними даними двигуна серії 4 А [5] потужності 5,5 кВт проведемо наступні необхідні розрахунки:
Номінальний фазний струм статора:
Базисне значення опору:
![]() Ом
Ом
Кутова частота струму:
![]()
Реактивний опір розсіювання статора у відносних одиницях:

Коефіцієнт, що зв’язує параметри машини в Т і Г-подібної схемах заміщення [6]:
Реактивний опір розсіювання фази статора:

Активний опір фази статора:

Індуктивність розсіювання фази статора:

Реактивний опір розсіювання фази ротора:

Активний опір фази ротора:

Індуктивність розсіювання фази ротора:

Реактивний опір взаємоиндукції:

Індуктивність взаємоиндукції:

Імітаційна модель ліфта з контролем за швидкістю зображена на рисунку 2
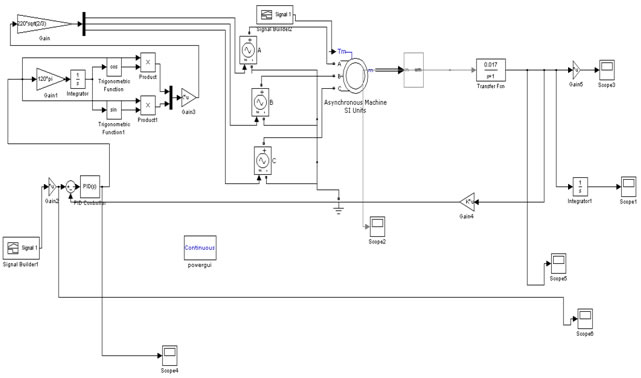
Рисунок 2 – Імітаційна модель ліфта з контролем за швидкістю
Для підтримки швидкості на потрібному рівні виберемо ПІД регулятор – найбільш ефективний і поширений вид регулятора, що забезпечує досить високу точність при управлінні різними процесами [7]. Відомо, що даний регулятор слід вибирати для систем регулювання, з відносно малим рівнем шумів і величиною запізнювання в об’єкті управління.
Для синтезу регулятора застосуємо метод Зіглера-Нікольса [8].
- Виставляємо всі коефіцієнти (Kp, Ki, Kd) в 0.
- Починаємо поступово збільшувати значення Kp і стежимо за реакцією системи. Нам потрібно добитися, щоб в системі почалися стійкі коливання (викликані перерегулюванням). Збільшуємо Kp, поки коливання системи не стабілізуються (перестануть затухати).Запам’ятовуємо поточне значення Kp (позначимо його Ku) і заміряємо період коливань системи (Tu). За результатами Kp = 52, Tu = 0.9.
- Тепер використовуємо отримані значення Ku і Tu для розрахунку всіх параметрів ПІД регулятора за формулами:
Kp = 0.6 * Ku; Kp = 31,2
Ki = 2 * Kp / Tu; Ki = 69,3
Kd = Kp * Tu / 8; Kd = 3,51
Дані налаштування підставимо в ПІД регулятор і Промоделюємо систему і оцінимо отримані результати [9].
Розглянемо наступний варіант рухів-зупинок ліфта: ліфт стоїть на 3-му поверсі, в нього заходить 1 людина, поверх призначення – 5.
Результати моделювання зображені на анімації 1:
Анімація 1 – Графіки керуючого струму, лінійної швидкості переміщення ліфта, моменту опору, переміщення кабіни
Висновки
Була спроектована САУ процесу управління переміщення кабіни ліфта. Було розглянуто процес роботи об’єкта, його технологічна схема, а також мету проектування САУ. Були визначені завдання, необхідні системі для досягнення поставленої мети.
Були отримані і проаналізовані перехідні процеси даних моделей. Момент опору і керуючий струмовий сигнал, при різних умовах змінюється, однак за графіками видно, що заданий вплив відпрацьовується і на виході ми отримуємо необхідну швидкість з мінімальними відхиленнями від заданих на вході значень.
Надалі в систему будуть внесені нелінійності [10] і буде з’ясований найкращий спосіб їх відпрацювання для досягнення поставленої мети.
Список джерел
- П. Д. Гаврілов, Л. Я. Гімельштейн, А. Е. Медведев Автоматизація виробничих процесів - М.: Недра, 1985. - 216с.
- Сайт компанії
OTIS
http://www.otis.com. - За заг. ред. І. П. Копилова і Б. К. Клонова Довідник по електричним машинам: У 2т./С74. Т.1.-М.: Вища школа, 1988. 456 с.
- Електронний каталог ліфтового обладнання. http://лифтов.рф/liftovoe-oborudovanie-katalog.
- А. Е. Кравчик, М. М. Шлаф, В. І. Афонін, Е. А. Соболенская Асинхронні двигуни серії 4А: Справочнік/А90 – М.: Енергоіздат, 1982. 504 с.
- В. Є. Китаєв, Л. С. Шляпінтох Електротехніка з основами промислової електроніки. Навчальний посібник для проф.-техн. навчальних закладів. Вид. 2–е, переробці. і доп. М.,
Вища. школа
, 1968. 416 с. з - С. Г. Герман – Галкин Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие – СПб.: Корона принт, 2001. 320 с.
- Ю. Лазарев Моделювання процесів і систем в MATLAB. Навчальний курс. – СПб.: Пітер; Київ: Видавнича група BHV, 2005. 512 с.
- П. В. Агуров Інтерфейси USB. Практика використання й програмування Спб.: БХВ Петербург, 2004.
- Б. Ван дер Поль. Нелінійна теорія електричних коливань. Пер. з англ. Связьтехіздат, 1935.