
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Цели и задачи
- 2. Актуальность работы
- 3. Научная новизна
- 4. Обзор исследований и разработок по теме
- 5. Проведенные исследования и планируемые практические результаты
- Выводы
- Список источников
Введение
Современная робототехника возникла в средине 20 века, когда в ходе развития производства появилась реальная потребность в универсальных манипуляционных машинах. Предшественниками роботов явились различного рода устройства для манипулирования на расстоянии объектами, контакт с которыми опасен или не возможен для человека. Первые такие устройства были пассивными, то есть механизмами без приводов и работали за счет мускульной силы. Позднее были созданы манипуляторы с приводами, которые управлялись человеком различными способами [1]. Первые такие манипуляторы были созданы в 1940-1950 гг. для атомных исследований, а позднее и для атомной промышленности.
Современные роботы относятся к новому этапу своего развития – создание интеллектуальных роботов. Современный робот обладает мобильностью, способен самостоятельно исследовать окружающую среду, решать ряд задач, предусмотренных создателями, однако все это не гарантирует его полной самостоятельности. Именно поэтому тема удаленного управления является до сих пор актуальной.
В данной работе представлены исследования системы управления
оператор – компьютер – удаленный управляемый объект
на базе
дифференциального робота.
1. Цели и задачи
Работа имеет научно-практический характер и главной ее целью являются исследование методов и подходов к решению задачи обхода препятствий при помощи одиночной камеры и разработка удаленного диалогового управления мобильным роботом. При диалоговом управлении, в случае не разрешения задачи обхода препятствия, робот подает сигнал оператору и движется по указанному оператором направлению.
Задачи:
- Исследование возможностей беспроводной передачи данных от терминала управления к роботу.
- Исследование возможностей применения компьютерного зрения для мобильного робота.
- Разработка минимальной структуры для реализации мобильного робота с возможностью удаленного дистанционного управления.
- Разработка алгоритма определения и обхода препятствий.
- Разработка программного обеспечения, позволяющего подключаться к данному роботу, управлять им, иметь возможность наблюдения окружающей обстановки вокруг робота.
- Проведение экспериментов на полученной реализации робота.
2. Актуальность работы
В случаях, когда человеку-оператору невозможно находиться в опасных для здоровья и жизни ситуациях, без дистанционного управления невозможно обойтись. Следует упомянуть, что дистанционное управление применимо в управлении любой системой, имеющей электронное управление.
Дистанционное управление предоставляет следующие преимущества:
- экономия времени при осмотре управляемого объекта, так как наблюдение оператором ведется со стороны;
- возможность действовать удаленно от объекта;
- одновременное управление несколькими объектами с одного терминала;
- повышается уровень производительности работ;
- повышается безопасность работы;
- возможность уменьшение количества работающего персонала.
В случае управления подвижным объектом оператору важно видеть обстановку вокруг данного объекта. Для управления роботом обстановку можно наблюдать со стороны объекта или всей местности, включая и сам объект сверху. Последний способ требует неопределенное количество камер, зависящее от сложности рельефа, поэтому чаще всего сам объект оснащается системой видеонаблюдения.
Одним из основных требований к подвижному объекту помимо движения в различных
направлениях является обход и избежание столкновения с препятствиями. В настоящее
время существует огромное количество методов и алгоритмов определения препятствий,
однако основным недостатком большинства методов является то, что почти все методы
требуют определенной аппаратуры, к примеру, различных датчиков. Различные методы
требуют различного набора датчиков. Современной тенденцией является исследование
применения таких технологий, которые позволили бы реализовывать процессы так, как
их выполняет человек. Это в первую очередь касается и методик обхода препятствий.
Реализация методов компьютерного зрения для определения препятствий является
сложной задачей. Совершенно недостаточно присоединить видеокамеру к компьютеру и
рассчитывать, что такая установка будет видеть
, а тем более реагировать на
окружающие препятствия.
3. Научная новизна
Новизной является модификация алгоритма обхода препятствий по данным с видеоряда для реализации робота с минимальной комплектацией и адаптация системы для управления с любого компьютерного устройства.
4. Обзор исследований и разработок по теме
Невозможно определить, откуда берет свое начало история управляемых машин. Ведь в некотором виде песочные часы тоже являются управляемым роботом, а известны они еще в Азии еще до Рождества Христова. Они выполняют монотонную несложную работу — измеряют время. По истечению этого времени человек (человек-оператор) должен произвести некоторые действия для дальнейшей работы часов.
Промышленная революция кроме перехода от мануфактурного производства привнесла производство конвейерное, которое требовало механизации. Над каждой машиной стояло несколько операторов, которые следили за ходом производственного процесса и корректировали его.
Однако началом истории современных управляемых машин можно считать момент изобретения Раймондом Гоерцом (Raymond Goertz) сервоманипулятора в 1951 году [2]. Следует отметить, что в этом году в СССР выходит приказ о создании автоматических систем управления военной техникой. С этой целью в МВТУ им. Баумана создана кафедра СМ-7, впоследствии получившая название кафедры специальной робототехники и мехатроники [3]. На базе кафедры в 1971 году была создана проблемная лаборатория, тематика которой была ориентирована на проектирование и исследование манипуляционных систем, работающих на объектах в экстремальных для человека условиях. Направления исследований достаточно широкие включая космические станции, подводные обитаемые и необитаемые аппараты, а также объекты, работающие при высоких уровнях радиации в атомной энергетике и при чрезвычайных ситуациях.
Ведущими отраслями в Украине, которые требуют постоянной модернизации оборудования, является тяжелая промышленность и машиностроение. Поддержка человеко-машинного взаимодействия осуществляется в направлении специалист — интеллектуальный робот-манипулятор [4]. Поэтому в настоящий момент робототехника в Украине имеет в первую очередь промышленное значение и все разработки направлены в основном именно в эту отрасль, хотя развиваются и другие направления.
Учитывая особенности Донбасского региона, следует упомянуть, что управление и автоматизация направлены для нужд тяжелой промышленности. Донецкий национальный технический университет вел и ведет разработки в частности для области информационных технологий, машиностроения, металлургии, горного дела [5].
В настоящее время больше внимания уделяется мобильным системам, их преимущество
в свободном передвижении в пространстве. Схема системы управления для различных
видов управления в основном схожа: человек-оператор – пульт управления –
управляемый объект. Реализаций много, в основном разнообразие обеспечивается за
счет связи пульт управления – управляемый объект
. В качестве пульта управления
может выступать как специально разработанное устройство, так и компьютер со
специальной программой. Существуют и экзотические системы управления, например,
система мозг-компьютер
описанная в работе Гранковского В.А [6].
В сфере мобильных роботов приоритетной является задача обеспечения безопасности робота
от столкновений с препятствиями, преодоление пути по заданным маршрутам [7].
Способы нахождения препятствий зависят от используемых датчиков. Подробнее можно
ознакомиться в [8].
Современной тенденцией управления роботами является
исследование применения таких технологий, которые позволили бы реализовывать
процессы так, как их выполняет человек. Это в первую очередь касается и методик
обхода препятствий. Для фиксации изображения окружающей среды подобно человеческому
глазу используется, как правило, камера, а технология называется компьютерное зрение
.

Рисунок 1 – Пример мобильного робота – робот пылесос iRobot
Согласно последним исследованиям для ориентации робота в пространстве достаточно одной камеры. Тем не менее, используя одну камеру, усложняются алгоритмы для распознавания препятствия и определения расстояния до него.
Для ориентации робота в пространстве необходимо решить ряд задач [9]:
- Чтобы двигаться к цели, роботу необходимо сформировать достаточно точный образ окружающего его пространства. Данная задача решается при помощи датчиков. Однако при выборе датчиков стоит учитывать среду перемещения робота. Например, при разной влажности воздуха у ультразвукового датчика будет различное время отклика, что скажется на определении расстояния к препятствию. При использовании камеры в качестве датчика обнаружения препятствия требуется большая вычислительная мощность системы управления.
- В ходе движения робот должен быстро и точно управлять мотором и положением колес. Расчет движения колес простейшего трехколесного робота сводится к системе дифференциальных уравнений (откуда и название робота)[10]. В других задачах, связанных с динамикой движения роботов (область теоретической механики), до нахождения ответа еще очень далеко, а поиск приближенных коэффициентов, определяющих параметры движения, требует от бортового устройства постоянного решения систем дифференциальных уравнений. Поэтому сложности здесь как технические, так и теоретические.
- Робот должен знать свое реальное местонахождение. Определение координат подвижного объекта – это одна из фундаментальных задач навигации. Решение данной проблемы для мобильного робота заключается в построении модели окружающего мира и близлежащих препятствий. Например, Скотом Ленсером и Мануэллой Велосо из университета Карнеги-Меллона была разработана радиальная модель. Данная модель сохраняется в памяти робота и содержит информацию об объектах окружающей среды, при этом сохраняется информация только о ближайших объектах, за счет чего робот может ехать в любом направлении и избегать препятствий, если только не появились новые препятствия за то время, пока область не была в зоне видимости [11].
- Обеспечить бесперебойную связь с оператором, либо предусмотреть действия робота в случае потери связи.
В работе приоритетными являются задачи 1 и 3. Анализ литературы, посвященной разработке методов обхода препятствий с помощью обработки видеопотока, показал, что в основном используются следующие основные методики:
- определение краев объектов на изображениях и на основании этих данных формирование выводов о близости препятствий [12];
- слежение за изменением яркости фрагментов кадра [13];
- опознавание объектов по цвету.
Для обработки видеопотока на предмет обнаружения препятствий возможны две реализации:
- Поток обрабатывает непосредственно бортовой компьютер робота. В виду этого случая необходим мощный микроконтроллер или микрокомпьютер.
- Поток транслируется на рабочую станцию оператора. После анализа рабочая станция формирует команду и передает ее роботу. Для трансляции необходим передатчик, позволяющий передавать видео достаточного для распознавания.
Для трансляции видео оператору используется стандарт IEEE 802.11 b/g/n, это позволяет обеспечить бесперебойную (в рамках стандарта) передачу данных и достаточный радиус действия модели.
5.Проведенные исследования и планируемые практические результаты
Для исследования функционирования беспроводной системы управления роботом, предложена схема системы управления подвижным объектом. Система имеет возможность управления несколькими подвижными объектами от одного терминального устройства и обеспечивает необходимый уровень помехозащищенности.
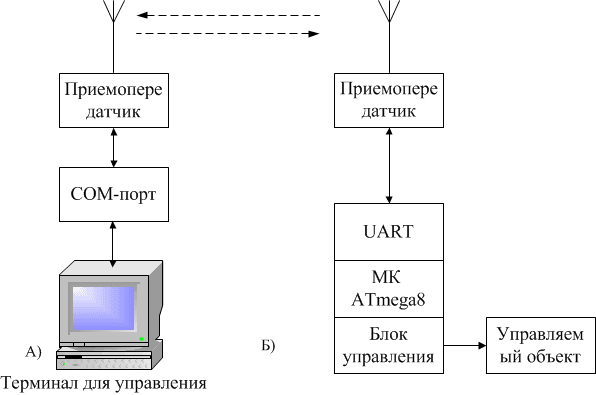
Рисунок 2 - Схема связи между компьютером (А) и танком (Б)
Передача команд от терминального устройства на объект управления осуществляется с помощью радиосвязи, которая реализована на модулях частотной модуляции HOPE RF HM-R433 и HOPE RF HM-T433 [14]. Модули частотной модуляции подключаются к терминальному устройству и к устройству управления подвижного объекта через последовательный интерфейс RS-232 (СОМ-порт). Устройство управления подвижным объектом построено на микроконтроллере ATmega 8 фирмы Atmel [15]. Контроллер получает команды через радиосвязь, анализирует их и выдает соответствующие управляющие сигналы на блок управления объекта. Команды представляют собой коды ASCII.
Для управления объектом на компьютере установлена программа Terminal 1.9b, которая позволяет отправлять в СОМ-порт и получать из СОМ-порта информацию. Терминальная программа имитирует работу органа управления объектом типа джойстик или клавиатуры и используется только для отладки системы управления.
Команды передаются в виде пакета данных. Пакет данных при передаче команды имеет следующий формат:
- байт для выхода передатчика из спящего режима;
- 10 одинаковых символов для идентификации пакета из общего шума;
- код приемника (номер танка)
- код команды;
- уточнение для команды;
- признак конца пакета.
Устройство управления объекта принимает пакет данных, обрабатывает его и выполняет соответствующую команду. В случае получения команды отправки данных на сервер устройство управления объекта отправляет пакет со следующей структурой:
- байт для включения передатчика;
- 10 одинаковых символов для идентификации пакета из общего шума;
- код приемника (номер танка)
- заряд батареи;
- уровень заряда с датчика для выявления события попадания в танк;
- признак конца пакета.
Устройство управления подвижного объекта реализовано на микроконтроллере ATmega 8 фирмы Atmel, структурная схема которого показана на рис. 3. Радиомодули подключаются к устройству управления через последовательный интерфейс UART микроконтроллера. Модуль приемника HM-R433 к входу RXD, а модуль передатчика к TXD. Для управления скоростью вращения двигателей используется широтно-импульсная модуляция (ШИМ), которая реализована с помощью таймеров микроконтроллера. Для управления левым двигателем используется выход ОС1A микроконтроллера, а для управления правым – ОС1В. Направление вращения левого и правого двигателя задается сигналами с выводов PB5 и PB6.
Датчик измерения уровня заряда батареи подключается к входу ADC0 аналого-цифрового преобразователя (АЦП) микроконтроллера. Датчик инфракрасного освещения – ко входу ADC1.
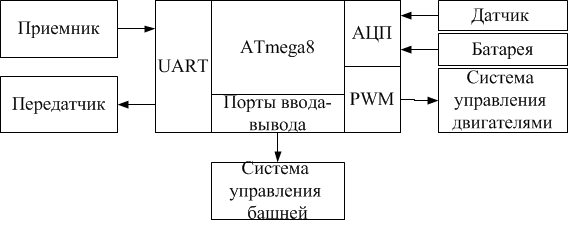
Рисунок 3 - Структурная схема устройства управления танком
В ходе экспериментов было выяснено, что данная система работает на расстоянии 30 м. Скорость передачи 9600 бод. Для передачи видео необходима скорость передачи не менее 1,8 Мб/с. Таким образом, для камеры необходим отдельный передатчик.
Проведя анализ аппаратных средств, для реализации управляемого робота, с возможностью видеонаблюдения и обходом препятствий, были определены аппаратные средства, необходимые для создания простого мобильного робота для данного исследования:
- Подвижная платформа.
- Датчики для определения препятствий.
- Приемопередатчик для передачи информации о состоянии мобильного робота и команд мобильному роботу от оператора.
- Устройство управления роботом, которое будет располагаться на подвижной платформе и обрабатывать команды оператора и формировать сообщения о текущем состоянии.
- Рабочая станция оператора.
- Устройство наблюдения за роботом.
Принцип работы данной системы приведен на рисунке 4.
Рисунок 4 - Общая схема собираемого устройства.
(Анимация: 3 повтора; 400х251 пкс; 28,9 кБ)
В качестве рабочей станции оператора используется ноутбук с Wi-Fi-передатчиком. Пульт управления возможно также реализовать на базе телефона с ОС Android.
В качестве датчика и передатчика информации о среде вокруг робота используется IP-камера WEBCAM for ISO ANDROID. Характеристики камеры следующие:
- радиус действия камеры соответствует стандарту IEEE 802.11 b/g/n;
- объем передаваемых данных 30 bps;
- Разрешение 640х480 р;
- Форматы сжатия LPEG и MJPEG.
В данном исследовании обход препятствий реализуется с использованием только видеопотока, поэтому в качестве датчиков используется видеокамера. Ввиду того, что алгоритм обработки видеопотока еще на стадии разработки и в ходе исследования подвергается модификациям, решено использовать вариант обработки видеопотока на терминале управления. Значительным преимуществом этого выбора является то, что мобильный робот не нуждается в мощном бортовом компьютере, а следовательно, можно обойтись микроконтроллером семейства ATtiny или ATmega фирмы Atmel.
В качестве передатчика выбран Wi-Fi модуль SPB800 [16]. Модуль выбран благодаря следующим характеристикам:
- Скорости передачи данных: 1, 2, 5.5, 6, 9, 11, 12, 18, 24, 36, 48, 54 Мбит/c;
- Аппаратное ускорение шифрования (протоколы WEP и AES, длина ключа до 128 бит);
- Поддержка интерфейса UART, скорость передачи от 9600 бит/с до 3.6 Мбит/с;
- Поддержка протоколов: TCP/IP, DHCP, UDP, ICMP, HTTP;
- Поддерживаемые режимы работы: ad-hoc, infrastructure.
Для подачи управляющего сигнала на двигатели робота используется драйвер L293D. Схема L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеется возможность управлять с помощью широтно-импульсной модуляции (ШИМ). L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы.
Алгоритм управления состоит из следующих шагов:
- получение описания изображения среды с видеокамеры;
- обработка изображения (выделение границ объектов, распознавание изображения препятствия на кадре);
- определение параметров и ориентации препятствия;
- формирование данных для системы управления.
Алгоритмы обработки видеоданных осуществлены благодаря библиотеке OpenCV.
Выводы
В магистерской работе реализована и исследована связь между управляющим терминалом (компьютером) и подвижным объектом. Выяснено, что для реализации системы видеонаблюдения возможностей данной реализации недостаточно.
Обоснован выбор минимальной конфигурации для реализации мобильного робота с видеокамерой в качестве единственного датчика. Предусмотрена возможность трансляции видео оператору.
Проведен анализ базовых алгоритмов обработки видеоданных и обнаружения препятствий.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2014 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Юревич Е.И. «Основы робототехники». - 2-е изд., перераб. и доп. - Спб.: БХВ-Петербург, 2005. - 416 с.: ил.
- Мой робот РУ сайт посвященный робототехнике / Интернет-ресурс. - Режим доступа: www/ URL: http://www.myrobot.ru/articles/hist_1950.php - Загл. С экрана.
- Кафедра "Специальная робототехника и мехатроника", МГТУ им. Н.Э.Баумана, история кафедры / Интернет-ресурс. – Режим доступа: www/ URL: http://hoster.bmstu.ru/~sm7/History/History_glavnew.htm - Загл. С экрана.
- Соснина А., статья «Сучасний стан та перспективи розвитку робототехніки в Україні», 2013.
- Технический парк Донецкого национального университета / Интернет -ресурс. – Режим доступа: www/ URL: http://masters.donntu.ru/techpark/index.htm - Загл. С экрана.
- Моя магистерская / Гранковский В.А. / Интернет-ресурс. - Режим доступа: www / URL: http://masters.donntu.ru/2013/fknt/grankovsky/thesis.htm- Загл. с экрана.
- Беспилотный автомобиль Google (Google выдаст больше ссылок, чем я)
- Как смартфоны чувствуют мир. Часть 1: акселерометры, гироскопы и другие сенсоры / Олег Коленченко / Интернет-ресурс. - Режим доступа: www / URL: http://www.ferra.ru/ru/techlife/review/mems-part-1/#.U4iJ7vl_voF - Загл. с экрана.
- История вычислительной техники за рубежом / Интернет-ресурс. - Режим доступа: www / URL: http://www.computer-museum.ru/frgnhist/ - Загл. с экрана.
- KINEMATICS MODELS OF MOBILE ROBOTS / Интернет-ресурс. - Режим доступа: www / URL: http://users.isr.ist.utl.pt/~mir/cadeiras/robmovel/Kinematics.pdf - Загл. с экрана.
- Visual Sonar: Fast Obstacle Avoidance Using Monocular Vision / Интернет-ресурс. - Режим доступа: www / URL: http://www.cs.cmu.edu/~mmv/papers/03iros-sonar.pdf - Загл. с экрана.
- Optical Flow based robot obstacle avoidance/ Интернет-ресурс. - Режим доступа: www/ URL: http://cdn.intechopen.com/pdfs-wm/4206.pdf - Загл. С экрана.
- A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision/ Интернет-ресурс. - Режим доступа: www/ URL: http://www.ijmlc.org/papers/204-L293.pdf - Загл. с экрана.
- Радиомодули HOPE-RF. С. Светлов// Беспроводные технологии – 2009, №2. – С.32 – 35.
- Евстифеев, А.В. Микроконтроллеры AVR семейства Mega. Руководство пользователя. — М.:Издательский дом «Додэка-XXI», 2007. — 592 с: ил.
- Техническая документация SPB800 /Интернет-ресурс. - Режим доступа: www / URL: http://datasheet.octopart.com/SPB800-BCP1-H%26D-Wireless-datasheet-17745178.pdf- Загл. с экрана.