УДК 004.771+004.772
А. О. Кравецкий, В. А. Краснокутский
Донецкий национальный технический университет, г. Донецк
кафедра компьютерной инженерии
Варианты реализации системы управления беспроводным объектом с возможностью видеонаблюдения
Аннотация
А . О. Кравецкий, В. А. Краснокутский. Рассмотрены вопросы построения системы управления и наблюдения за удаленным подвижным объектом на примере игрушечного танка. Предложен минимум аппаратных средств для реализации подобной системы.
Ключевые слова: устройство управления подвижным объектом, радиомодуль частотной модуляции, микроконтроллер, стандарт Wi-Fi, IP-камера.
Постановка проблемы.Дистанционное управление надежно вошло в наш быт. Примерами могут служить бытовая электронная аппаратура, автомобильная сигнализация, автоматизированное производство, авиация, военное дело, освоение космоса и прочие. В случаях, когда человеку-оператору невозможно находиться в опасных для здоровья и жизни ситуациях, без дистанционного управления вообще невозможно обойтись. Следует упомянуть, что дистанционное управление применимо в управлении любой системой, имеющей электронное управление.
Дистанционное управление предоставляет следующие преимущества:
- экономия времени при осмотре управляемого объекта, так как наблюдение оператором ведется со стороны;
- возможность действовать с любого расстояния, позволяющего системой;
- одновременное управление несколькими объектами с одного терминала;
- повышается уровень производительности работ;
- повышается безопасность работы;
- возможность уменьшение количества работающего персонала и, как следствие, экономии фондов заработной платы.
В качестве эталонов для исследования были проанализированы следующие примеры:
- управление кранами, компании TELECRANE, Алтайтайль;
- управление комплексами по вырубке леса;
- управление различными заводами по сборке машин BMV;
- технология умный дом;
- системы управления нагрузкой через интернет;
- управление детскими игрушками.
Для дальнейших исследований была выбрана игрушка-танк. Целью исследования является реализация модели управления и наблюдения за игрушкой на расстоянии более десятка километров.
Анализ литературы.Проведен анализ различных модулей связи и различных способов доступа к удаленному компьютеру. На основе анализа литературных источников, стандартов протоколов видео и передачи рассмотрен минимум аппаратуры, необходимый для реализации подвижной управляемой модели с видеокамерой.
Цель статьи.Рассмотреть возможные способы реализации управления и наблюдения за удаленным подвижным объектом. Подобрать минимальный набор аппаратных средств для реализации данной системы.
Постановка задачи исследования. В работе [1] рассмотрено функционирование беспроводной системы управления подвижным объектом. При этом система имела возможность управления объектом на небольших расстояниях в пределах комнаты.
Для решения задачи управления предлагалась система управления, структурная схема которой представлена на рис.1. Управляемым объектом является игрушка-танк. Управление осуществляется с помощью терминального устройства.
Передача команд от терминального устройства на объект управления осуществляется с помощью радиосвязи, которая реализована на модулях частотной модуляции HOPE RF HM-R433 и HOPE RF HM-T433 [2]. Модули частотной модуляции подключаются к терминальному устройству и к устройству управления подвижного объекта через последовательный интерфейс RS-232 (СОМ-порт). Устройство управления подвижным объектом построено на микроконтроллере ATmega 8 фирмы Atmel [3]. Контроллер получает команды через радиосвязь, анализирует их и выдает соответствующие управляющие сигналы на блок управления объекта. Команды представляют собой коды ASCII.
Для управления объектом использовалась программа Terminal 1.9b, которая позволяет отправлять в СОМ-порт и получать из СОМ-порта информацию. Терминальная программа имитирует работу органа управления объектом типа джойстик или клавиатуры и используется только для отладки системы управления.
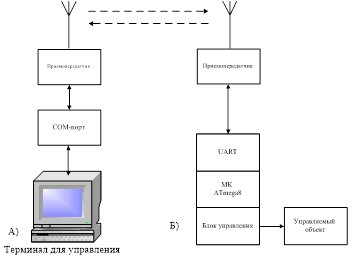
Рисунок 1. Схема связи между компьютером (А) и танком (Б)
В данной работе рассматривается система управления удаленным подвижным объектом. При этом система должна иметь возможность предоставления наблюдения за подвижным объектом или окружающей его обстановкой.
Решение задачи.
Для решения задачи наблюдения за подвижным объектом необходимо рассмотреть варианты размещения камеры, их два. Первый — когда камера установлена на объекте. Второй ? когда камера охватывает всю площадку, по которой движется объект. Рассмотрим оба способа.
Если камера установлена на объекте, то необходимо обеспечить передачу видео на компьютер в беспроводной среде. Таким образом, необходимо обеспечить скорость передачи данных с объекта на терминал не меньше чем скорость потока данных с камеры. Рассмотрим камеры с использованием кодека MJPEG, т.к. данный класс камер выдает самый маленький поток видеоданных с приемлемым качеством изображения. Минимальный поток данных с камеры составляет 1,8 Мбайт/сек [4]. Максимальная скорость приема-передачи HOPE RF HM-R433 и HOPE RF HM-T433 составляет 9,6 кбит/сек = 1,2 кбайт/сек, что в разы меньше чем поток данных с камеры. Отсюда следует, что для передачи видео необходимо разработать отдельно систему трансляции видео.
Если от камеры требуется охват площади передвижения подвижного объекта, то данная задача носит ситуативный характер. Для обеспечения охвата всей площади одной камеры может быть мало, что вносит дополнительные финансовые затраты в реализацию проекта.
Для задачи управления через интернет возможна реализация системы терминал управления ?локальная станция-управляемый объект (рис 2). Рассмотрим два варианта реализации.
В первом варианте в качестве локальной станции выступает компьютер, который посредством передатчика отправляет команды для подвижного объекта, а с помощью приемника получает данные об объекте (в случае, если камера установлена на объекте, это будет видеопоток). Назовем этот компьютер сервером. Под терминалом управления будем подразумевать другое компьютерное устройство, которое имеет доступ к компьютеру-станции. Терминал управления на этапе тестирования и разработки имеет доступ к серверу с помощью программы удаленного доступа (TeamViever, X-Windows System и т.д.). Недостатком способа подключения через программы удаленного доступа является медленное отображение экрана сервера, что приводит к некорректному отображению видео. Поэтому в дальнейшем выбрана реализация, при которой видео транслируется на страницу в интернете, к которой можно получить доступ лишь при наличии пароля.
Второй вариант предусматривает использование 3G-связи. В данном случае терминалом управления выступает телефон с поддержкой 3G-связи. Второй телефон выступает в качестве локальной станции и камеры и приемо-передатчика и установлен на подвижный объект. Недостатком этого способа является высокая стоимость 3G-связи.
В случае, когда камеры не установлены на объект, можно использовать те же два способа, что перечислены выше. Правда, для реализации телефонного управления подойдут телефоны с GSM [5].

Рисунок 2. Схема связи компьютер (А) - компьютер (Б) - управляемый объект (В)
Для решения задачи целесообразно делать универсальную систему, когда камера находится на подвижном объекте. В виду высокой стоимости 3G-связи, решето использовать систему, реализованную на компьютерах. Для обеспечения передачи видео между локальной станцией и объектом управления используется стандарт Wi-Fi. Стандарт выбран благодаря следующим качествам:
- пропускная способность позволяет передавать видео;
- радиус действия больше чем у Bluetooth и ZigBee;
- широкая распространенность доступных Wi-Fi точек.
Одной из задач исследований является анализ самостоятельного подключения мобильного робота к доступным Wi-Fi сетям с возможностью продолжения текущего сеанса управления.
В качестве камеры используется IP-камера WEBCAM for ISO ANDROID. Характеристики камеры следующие:
- радиус действия камеры соответствует стандарту IEEE 802.11 b/g/n;
- объем передаваемых данных 30 bps;
- Разрешение 640х480 р;
- Форматы сжатия LPEG и MJPEG;
На основе IP-камеры, как единственного датчика, возможно реализовать алгоритм обхода препятствий.
Выводы. В данной статье рассмотрены варианты реализации системы управления удаленным объектом с видеонаблюдением. Определен круг задач для реализации и исследования.
Список литературы
- Система беспроводного управления удаленным объектом. А.О. Кравецкий, В.А Краснокутский//Інформаційні управляючі системи та комп'терний моніторинг (ІУС КМ - 2013) : IV Всеукраїнська науково-технічна конференція студентів, спірантів та молодих вчених, 24-25 квітня 2013 р., м.Донецьк зб. доп. / Донец. націонал. техн. ун-т; редкол. В.А. Світлична. - Донецьк: ДонНТУ, 2013. -В 2 тт. - Т.1. 765 с. 137-143.
- Радиомодули HOPE-RF. С. Светлов// Беспроводные технологии - 2009, №2. С.32-35.
- Евстифеев, А.В. Микроконтроллеры AVR семейства Mega. Руководство пользователя. М.:Издательский дом: Додэка-XXI- 2007. - 592 с: ил.
- Кодек MJPEG. Режим доступа: http://www.malbred.com/kodirovanie-video/kodek-mjpeg.html
- Машинка, управляемая сотовым телефоном. Режим доступа: http://cxem.net/uprav/uprav24.php