Abstract
In the area of discrete manufacturing use of socalled AGVs (automated guided vehicles) is state of the art. Mobile systems connect workplaces, storage areas as well as incoming and delivery zones achieving lean production logistics. This publication focuses on the need for providing effective educational systems and developing innovative control methods to increase the use of mobile robots in this professional field of application. To fulfil these tasks, we present the mobile mechatronic learning system and research object Robotino offered by the industrial education company Festo Didactic. Besides introduction of motivating learning systems for future production logistics experts, we document supported options how to realize new concepts for more efficient transportation execution. The presentation is based on three practical samples covering different levels of complexity.
Keywords
Mobile Robot, Planning, ROS, Robocup, Industrial Logistic, Robotino.
1. INTRODUCTION
In industry mobile robots are used as autonomous transport systems to make logistics processes more flexible and efficient. However, it turns out that the mobile robot systems in this kind of applications are guided and controlled by supervisory systems and are still far away to act autonomously as intelligent mobile systems. There are numerous scientific papers about multi-agent planning and scheduling methods but there exist no reliable implementation on mobile robot systems in industry.
One goal of this paper is to address this industrial problem to the education and research of logistics processes in mobile robotics. Our implementation platform will be the mobile robot system Robotino [1] that has gained worldwide acceptance for a variety of educational and research institutions.
This article focuses on three logistics applications performed using Robotino and providing different levels and aspects of possible learning and research scenarios up to the well known robotics competition at the RoboCup event [2].
2. THE MOBILE MECHATRONIC LEARNING SYSTEM AND RESEARCH OBJECT ROBOTINO
A. System design
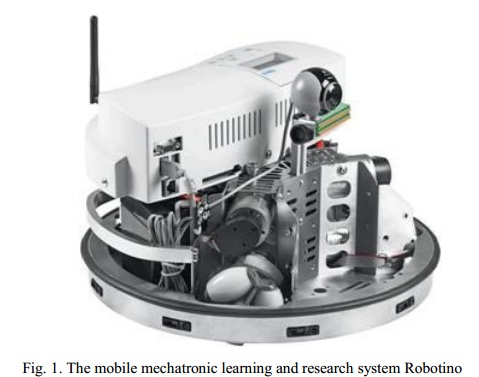
Robotino is a mobile mechatronic learning system and research object developed by the industrial education company Festo Didactic, Denkendorf, Germany, in cooperation with the Robotics Equipment Corporation (REC), Munich, Germany. Worldwide, educational and research institutions use this fascinating and motivating system which features a compact and robust design as well as expandable hardware, see Fig. 1.
The three drive modules of the Robotino are integrated in a sturdy, laser-welded stainless steel chassis. The chassis is protected against collision by means of a rubber protective dimensions are 370 mm in diameter and 210 mm in height with an overall weight of approximately 11 kg. With its omni-directional drive, Robotino can move forwards, backwards and sideways in any direction and also turns on the spot. Three industrial DC motors with optical shaft encoders and gears with interchangeable pinions permit speeds of up to 10 km/h. The chassis contains nine infrared distance sensors. Analogue inductive and optical reflective sensors are also available for the Robotino to sense for example an aluminium strip or a coloured line. Additionally, Robotino is supplied with a colour webcam with JPEG compression. The compressed webcam image can be transmitted to an external PC via the wireless LAN for image evaluation or used as a live camera image. Power is supplied via two 12 V lead gel batteries which permit a running time of up to two hours.
A wide range of accessories is available such as sensors, e.g. optical, inductive, cameras, gyroscopes and laser range finders, plus handling devices, e.g. electrical grippers, arms and lifting devices. Moreover, users are able to integrate their own custom devices into Robotino by making use of various interfaces.
B. Control System Architecture
CThe Robotino features a high-performance embedded PC based on the PC 104 form-factor and an AMD Geode processor with a real-time Linux kernel. Operating system, programs and data are stored on an interchangeable compact flash card. The embedded PC provides several interfaces such as Ethernet, Wireless LAN, USB, RS232, and VGA port.
The Robotino server, a real-time Linux application, forms the heart of the controller. It controls the Robotino drive units and can communicate with external applications in three different ways:
- An open Linux library of C++ basic functions is available for direct, on-board programming of the embedded PC under Linux.
- A TCP/IP communication interface is provided for communication with the control computer via wireless LAN. The user is able to write C++ applications for wireless control of Robotino on the basis of a Windows C++ function library.
- Robotino View, an interactive graphical programming system, communicates over wireless LAN directly with the robot system, with no compiling or downloading to the controller.
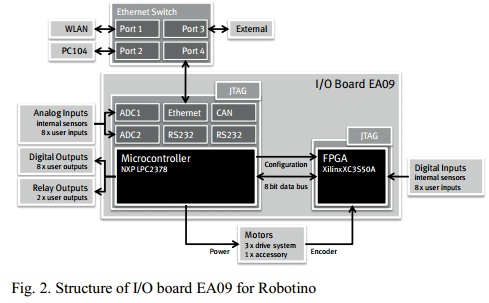
The activation of the three motors is performed via an additional board with digital and analogue inputs and outputs which is connected to the embedded PC via a serial connection. The control board provides the following additional interfaces for custom expansion, see Fig. 2:
- 8 analogue inputs 0 ± 10 V, 50 Hz
- 8 digital inputs and outputs (24 V, short circuit proof and overload proof)
- 2 relays for additional actuators
C. Programming
Robotino View, developed by REC, supports the development of control sequences based on the standardised sequential function chart language of IEC 61131 [3]. Users benefit from a navigation module providing functions for moving and defining travel paths, as well as from comprehensive functional module libraries e.g. mathematic and logic functions, see Fig. 3. Custom functional modules can be developed by programming in C++ or Lua, a powerful interpreter language [4]. For the communication between several Robotinos and to external controllers, links via object linking and embedding for process control (OPC), TCP/IP or user datagram protocol (UDP) are provided.
In comparison to other available mobile robot systems for education Robotino intensively focuses on the use as an AGV in production environments. Based on this standardized platform users are able to carry out different applications in logistics processes easily by developing their own handling and sensor components or by employing available accessories.
3. LOGISTICS TRAINING ARENA
This training set, called Logistics Training Arena, arose from following question: What are the fundamentals in order to accomplish an autonomous intelligent transport system? Many discussions with teachers and industrial companies document that even beginners should be able to solve following problems:
- Navigation consisting of localization and path finding to target positions
- Interfacing to external stations, e.g. stack magazines, buffers, conveyor belts or charging stations
- Communication to external control systems
For navigation the programming system Robotino View already includes all basic modules. Interfacing requires at least two important steps, the integration of handling devices and high accurate positioning at external stations
The accuracy in positioning must be at least ± 1 mm. This requires additional structure elements in the working area, e.g. metallic tapes that can be detected by inductive sensors. Of course, numerous other more sophisticated solution concepts exist but for beginners this method is an appropriate first step.
To build up communication between the AGV and the supervisory control system communication protocols shall be used well known in production industry. For this purpose one of the provided data exchange protocols OPC, TCP/IP or UDP are suitable.
The Logistics Training Arena consists of a small training platform with dimensions of the transport area of 0.9 m to 1.8 m with Robotino and some basic logistic elements as flat storage areas, magazine, conveyor belt, work pieces, and a charging station for the robot system, see Fig. 3.
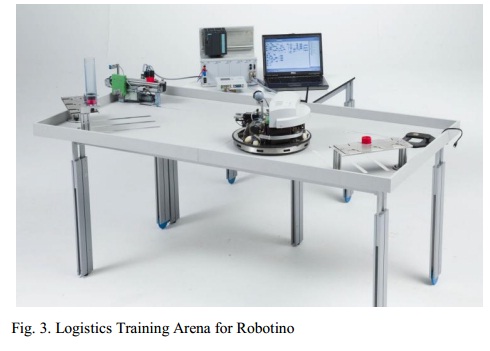
The programming and control system Robotino View running on an external PC or locally on the embedded PC guides Robotino to fulfil tasks like transporting work pieces from one logistic element to the other. Based on OPC Robotino communicates with a PLC (programmable logic controller) to trigger the conveyor belt. As an option, the Logistics Training Arena can be expanded by connection to production stations and workplaces to build up a production environment, see Fig. 4.
Users of this learning system give us positive feedback regarding effectiveness in qualifying and motivating beginners at school and vocational school level. The main focus is on programming a single AGV in a known environment.
4. CONCLUSION
Highlighting the significance of mobile robots for production logistics we derive the necessity for a standardized learning and research system. The mobile robot platform Robotino by Festo Didactic combines all functions and properties to be used for qualification as well as for developing new methods to accomplish autonomous transportation systems. To prove this we present three applications introduced at the schools level up to the university level. Starting with the programming of a single AGV, taking the next step to synchronize two mobile robots in the same area and share tasks between these systems, the Festo Logistics Competition at RoboCup is the most challenging application research institutes around the world working on.
11. References
[1] R.-C. Weber, M. Bellenberg, Robotino Manual, Festo Didactic GmbH
& Co. KG, Denkendorf, Germany, 2010
[2] ROBOCUP 2011, RoboCup Demonstration Event ± Festo Logistics
Competition, see: http://www.robocup2011.org, January 2011
[3] M. Bellenberg, Robotino View 2 Manual, Festo Didactic GmbH &
Co. KG, Denkendorf, Germany, April 2010
[4] R. Ierusalimschy, L.H. de Figueiredo, W.C. Filho: Lua - An
Extensible Extension Language. Software: Practice and Experience
26(6) (1996) 635±652.
[5] C. Verbeek, Robotino View API Documentation, Robotics Equipment
Corporation GmbH, see: http://doc.openrobotino.org/documentation/_
OpenRobotinoAPI/1/doc/rec_robotino_com/annotated.html, Januar
2011
[6] S. Schober, ProLog Manual, Festo Didactic GmbH&Co.KG,
Denkendorf, Germany, 2009.
[7] M. de Weerdt, A. ter Mors, and C. Witteveen, Multi-agent planning -an introduction to planning and coordination.
Technical report, Delft University of Technology, 2005. URL
http://www.st.ewi.tudelft.nl/ mathijs/publications/easss05.pdf.
[8] M. Riedmiller, U. Karras, Simulation of Logistics in RoboCup
Competition, SIMPAR 2010, Workshop Proceedings, see:
http://www.simpar.org, November 2010
[9] C. Deppe, U. Karras, Festo Logistics Competition 2011 - Rulebook,
Version 1.006.2011, Festo Didactic GmbH & Co. KG, Denkendorf,
Germany, April 2011