Введение
При траекторном управлении мобильными роботами (МР) возникают две задачи. Первая из них связана с выводом МР на заданную траекторию, вторая – со следованием по этой траектории. В задаче следования траекто- рии наиболее важно, чтобы отклонения текущего положения МР от этой траектории были минимальными. При этом качество следования определяется некоторым критерием, который необходимо минимизировать. В результате минимизации получают законы управления, которые физически реализуется в виде регуляторов. Системы управления с такими регуляторами имеют в своем составе информационно-измерительный канал, структуру которого образуют обратные связи, поставляющие данные о текущем состоянии объекта управления. Эти данные используются для формирования регуляторами управляющих сигналов, подавае- мых на исполнительные устройства (приводы), установленные на объектах управления и изменяющие его состоя- ние в соответствии с целью управления. По существу проектирование законов траекторного управления сводится к конструированию информационной структуры и синтезу параметров обратных связей.
Доклад посвящен проектированию законов траекторного управления МР на основе методов оптимизации и обратных задач механики. В качестве объектов управления рассматриваются два робота: колесный робот Robotino и гусеничный робот Rover5.
Траекторное управление МР Robotino
Объект управления. Объектом упрвления является МР Robotino, разработанный европейской фирмой Festo и предназначенный для использования в учебном процессе при изучении инженерных дисциплин в области управления и автоматики. Приборная часть Robotino включает процессорный модуль, комплекс сенсоров, видеокамеру, разъемы для подключения дополнительных устройств и модуля доступа к беспроводной сети. Колесная платформа (КП) Robotino имеет круглую форму и оснащена тремя автономными приводами с роликонесущими колесами, установленными под днищем вдоль окружности в точках, разделяющих дуги величиной 1200. Приводы управляются контроллером, обеспечивающим движение КП по трем степеням свободы таким образом, что с места она может начинать продольное движение на плоскости в любом направлении при одновременном вращении вокруг вертикальной оси. Контроллер имеет три управляющих входа, на которые подаются сигналы, соответствующие требуемым линейным скоростям vx и vy , а также угловой скорости ω .
Математическая модель движения МР Robotino.
Модель движения КП Robotino можно представить в виде:
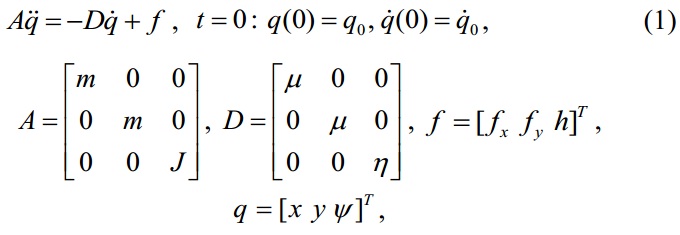
где m, J – масса и момент инерции робота; Ν – коэффициент трения при продольном движении; fx и f y– проекции силы, приложенной к центру масс; h – вращательный момент; ω = ψ – угловая скорость.
Постановка задачи управления движением МР Robotino
Поставим задачу найти такие управляющие функции – скорости vx, и vy и ω , обеспечивающие требуемое перемещение на плоскости центра масс КП из начального состояния (1) в заданное конечное состояние x , y . Следует отметить, что конструкция КП позволяет управлять движением ее центра масс на плоскости за счет применения только двух управляющих функций vx и vy при ω = 0 . Учитывая это обстоятельство и принимая допущение, что каналы управления по координатам x и y идентичные, можно преобразовать модель (1) к виду

В таком случае постановка задачи управления движением центра масс КП Robotino формулируется следующим образом. Для объекта управления, заданного уравнением (2), найти управляющую функцию в форме обратной связи vx(t, x, x.) , которая обеспечит перевод замкнутой системы (2) из начального состояния t = to, x(t0) = x0, x.(to) = 0 в заданное стационарное состояние равновесия t > 0, x(t) = x-, x.(t) = 0.Степень близости процессов в управляемой системе и эталонных процессов будем оценивать величиной, определяемой критерием, который имеет физический смысл нормированной по массе кинетической энергии.

Критерий (3) относится к классу локальных, которые, в отличие от интегральных, вычисляются в процессе функционирования системы управления. При этом искомое управление в виде функции vx(t) находится из условия минимума (3). В рассматриваемом случае функция управления должна вычисляться бортовым компьютером и, следовательно, она должна иметь ступенчатый вид vx(t) = vx(kT) при kT < t < kT + T, где T – период дискретности.
Для вычисления ступенчатой функции vx(kT) из условия минимума критерия (3) можно воспользоваться рекуррентной процедурой соответствующей простому градиентному методу

Производная в правой части (4) вычисляется путем дифференцирования (3) по переменной vxс учетом того, что она на интервале дискретизации T от времени не зависит. Выражение для искомой производной имеет вид

Введем обозначение

где Θ(t) – информационная функция, которая формируется по данным измерений сигналов обратной связи (по производной) и эталонной модели.
Далее в (5) выполним замену x* = x, что соответствует введению в закон управления обратной связи по координате x вместо сигнала от эталонной модели. Имеем
Поскольку данные измерений сигналов обратной связи дискретизируются при помощи аналого-цифровых преобразователей, то информационная функция в результате преобразуется к ступенчатой форме Θ(t) = Θ(kT) при kT < t < kT + T.
Подстановка информационной функции в ступенчатой форме в (4) приводит к конечно-разностному уравнению, определяющему дискретный закон управления координатой x:

Решение этого уравнения определяет ступенчатую управляющую функция vx(kT). Аналогичное уравнение получается для нахождения ступенчатой управляющей функции vy(kT).
Синтез параметров цифрового адаптивного регулятора (коэффициентов при управляемой координате и ее производной, входящих в выражение информационной функции), можно выполнить в соответствии с рекомендациями, приведенными в [1].
Для решения задачи следования заданной траектории на управляющие входы спроектированной системы (по координате x и координате y) вместо констант x- и y- следует подавать дискретные последовательности xr(t) и xy(t) (временные ряды), определяющие требуемую траекторию заданного движения КП в определенной системе координат. Эти последовательности могут быть решениями конечно-разностных уравнений или задаваться в виде числовых массивов. Следует отметить, что при задании начальных условий движения МР, которые не соответствуют расположению его центра масс на назначенной траектории, сконструированный закон управления обеспечивает последовательное решение двух задач траекторного управления: выведения и следования.
Список литературы:
1. Краснодубец Л. А., Крамарь В.А. Проектирование адап-
тивных регуляторов для мехатpонных систем //
Мехатpоника, автоматизация, управление, 2012. № 1. – С.
8.–12.
2. Кабанов А.А. Система робастного субоптимального
управления движением мобильного робота // Мехатроника,
автоматизация, управление, 2013. № 4. – С. 14–19.