


Зависимые кооперативные системы ADS‐C и ADS‐B
Содержание
- Введение
- 1. ADS‐C. Описание ADS‐C
- 2. Виды применения
- 3. Характеристики
- 4. ADS‐B. Описание ADS‐B
- 5. Режим S, ES 1090 МГц (1090 ES)
- 6. UAT
- 7. ОВЧ‐линия цифровой связи режима 4 (VDL режима 4)
- 8. Характеристики
- Список источников
Введение
Система Автоматического Зависимого Наблюдения в Режиме Радиовещания (Automatic Dependent Surveillance – Broadcast (ADS‐B)) — технология, внедряемая в настоящее время в США, России и других странах, позволяющая пилотам в кабине самолета и диспетчерам на наземном пункте, «видеть» трафик движения воздушных судов с большей точностью, чем это было доступно ранее и получать аэронавигационную информацию. Причём, осмотр движения воздушных судов, осуществляется без использования традиционных радаров. ADS‐B также передает в реальном времени погодную информацию пилотам. Эта информация значительно расширяет осведомленность пилота о ситуации и повышает безопасность полетов. Доступ к ADS‐B информации бесплатен и свободен для всех [2].
Система автоматического зависимого наблюдения в режиме радиовещания (ADS‐B) и система мультилатерации (MLAT) представляют собой дополнительные формы электронного наблюдения, которые могут использоваться в целях обеспечения обслуживания воздушного движения (ОВД) на маршруте и в районе аэродрома. Если раньше единственным средством обеспечения электронного наблюдения при обслуживании таких полетов служил радиолокатор, то в настоящее время системы ADS‐B и MLAT могут внедряться в тех районах, которые или вообще не обслуживались, или частично обслуживались радиолокатором. В связи со своей привлекательностью с точки зрения затрат ожидается, что системы ADS‐B и MLAT будут все чаще использоваться в тех районах, где использование радиолокатора экономически нецелесообразно, в частности в тех, где нет больших потребностей в организации воздушного движения (ОрВД).
Таким образом, тема моего индивидуального раздела была выбрана не спроста. Потому как, системы ADS‐B и MLAT тесно связаны, используемые, и развивающиеся в аэронавигационном наблюдении в наши дни. В целом необходимо поощрять переход на пассивное обнаружение (например, ADS‐B и системы мультилатерации). Следует разрабатывать активные системы MLAT, использующие минимальные частоты и мощности запросов, с тем чтобы исключить их отрицательное влияние на условия наблюдения. Оснащение новых групп пользователей приемоответчиками режима S (легкие воздушные суда) или БСПС (сверхлегкие реактивные воздушные суда) требует тщательного изучения и анализа, поскольку это может повлиять на работу существующего наземного и бортового оборудования.
1. ADS‐C. Описание ADS‐C
В режиме ADS‐C воздушное судно использует бортовые навигационные системы для определения своего местоположения, скорости и получения других данных. Наземная система ОрВД заключает контракт
с данным воздушным судном о предоставлении такой информации через регулярные интервалы или после определенных событий. Информация передается по линии передачи данных в двухточечной связи. Это означает, что доступ к такой информации не могут получить другие стороны (т. е. другие воздушные суда или другие системы ОрВД). Эксплуататор воздушного судна и поставщик обслуживания ОрВД заключают раздельные соглашения с поставщиком услуг линии передачи данных о доставке сообщений ADS‐C [9].
Информация, которая может передаваться в сообщениях ADS‐C, включает следующие данные:
a) нынешнее местоположение (широта, долгота и абсолютная высота) плюс временнaя отметка и FOM;
b) предполагаемый маршрут до очередной и (очередная +1) точек пути;
c) скорость (наземная или воздушная);
d) метеорологическая информация (скорость ветра, направление ветра и температура).
Бортовые и наземные системы согласовывают условия, при которых воздушное судно представляет донесения (т. е. периодические донесения, донесения о событиях, донесения о потребностях и аварийные донесения). Донесения, полученные системой ОрВД, обрабатываются для отслеживания воздушного судна на индикаторах аналогично тому, как это делается с данными наблюдения, полученными от ВОРЛ. В настоящее время частота передачи донесений при полете в океаническом воздушном пространстве составляет обычно от 15 до 25 мин. Однако диспетчеры могут в ручном режиме повысить частоту передачи донесений при выполнении конкретных полетов. На рис. 1 показана блок‐схема ADS‐C.
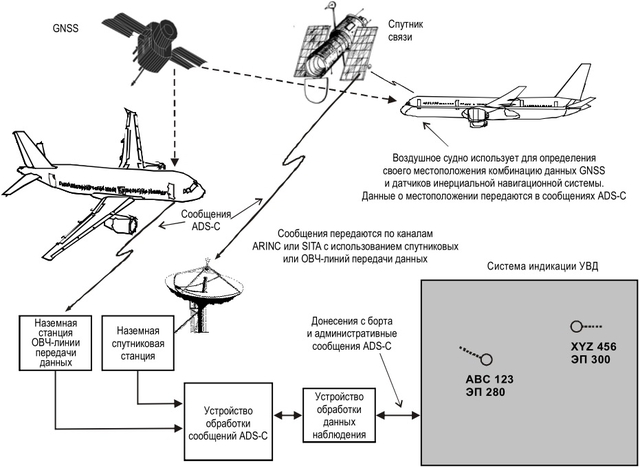
Рисунок 1 – Блок‐схема ADS‐C
2. Виды применения
ADS‐C обычно используется в океанических и удаленных районах, где отсутствуют радиолокаторы. Поэтому система ориентирована главным образом на транспортные воздушные суда большой дальности и может обеспечивать эшелонирование более эффективно, чем в ситуациях, когда орган УВД полагается только на донесения пилотов. Система ADS‐C обычно используется вместе со средствами CPDLC, позволяющими осуществлять электронный обмен данными между органом УВД и летным экипажем в качестве альтернативы речевой связи.
Примечание. В настоящее время система ADS‐C используется исключительно для обеспечения процедурного эшелонирования.
3. Характеристики
Функциональные возможности ADS‐C:
a) обеспечение наблюдения в районах, где практически нецелесообразно устанавливать радиолокаторы или системы MLAT;
b) практически обеспечивается представление данных о намерении воздушного судна (например, о будущих точках пути), что важно для выявления потенциальных конфликтных ситуаций;
c) предоставление линии передачи данных для связи воздушного судна с землей, благодаря чему соответствующие данные о воздушном судне направляются диспетчерам.
Недостатки ADS‐C:
a) система является системой зависимого наблюдения, т. е. она рассчитана на то, что воздушное судно надлежащим образом оборудовано для правильной передачи данных;
b) требуется установка дополнительной авионики (для передачи данных);
c) рабочие характеристики могут ограничиваться предельными параметрами средств связи;
d) передача каждого донесения может увязываться с расходами, поскольку данные передаются поставщиком услуг линии передачи данных. В результате частоту обновления данных обычно стараются уменьшить для сокращения затрат;
e) система не поддерживает функцию ASA, поскольку сообщения прямо не доступны другим воздушным судам.
4. ADS‐B. Описание ADS‐B
ADS‐B представляет собой радиовещательную передачу с борта воздушного судна данных о его местоположении (широте и долготе), абсолютной высоте, скорости, опознавательном индексе и другой информации, полученной от бортовых систем. Каждое сообщение о местоположении ADS‐B включает указание на качество данных, позволяющее пользователям определить, обеспечивает ли качество информации поддержку предполагаемой функции [4].
Данные о местоположении, скорости воздушного судна и связанные с ними указатели качества данных обычно получают от бортовой системы GNSS. Существующие инерциальные датчики самостоятельно не обеспечивают требуемых параметров точности или целостности данных, хотя эта проблема, возможно, будет решена в будущих системах. Поэтому сообщения ADS‐B о местоположении на основе данных инерциальной системы обычно передают с указанием на то, что параметры точности или целостности неизвестны. На некоторых новых воздушных судах используются комплексные установки GNSS и инерциальные навигационные системы для получения данных о местоположении, скорости и указателей качества данных, передаваемых системой ADS‐B. Ожидается, что такие системы будут более эффективными, чем системы, основанные исключительно на GNSS, поскольку инерциальные датчики и датчики GNSS обладают взаимодополняющими характеристиками, компенсирующими слабости каждой системы. Данные об абсолютной высоте обычно получают от кодирующего устройства барометрического высотомера (которое также используется в качестве источника данных для ответов режима С) [4].
Поскольку сообщения ADS‐B передаются в радиовещательном режиме, их может получать и обрабатывать любой подходящий приемник. Поэтому функция ADS‐B поддерживает как наземные, так и бортовые виды применения наблюдения. Для авиационного наблюдения устанавливаются наземные станции, предназначенные для получения и обработки сообщений ADS‐B. При бортовом применении воздушные суда, оборудованные приемниками ADS‐B, могут обрабатывать сообщения от других воздушных судов для определения воздушной обстановки в рамках обеспечения таких видов применения, как CDTI. Разрабатываются другие, более совершенные средства ASA, которые, как ожидается, окажут серьезное влияние на формы организации воздушного движения. На рис. 2 приведена блок‐схема ADS‐B.
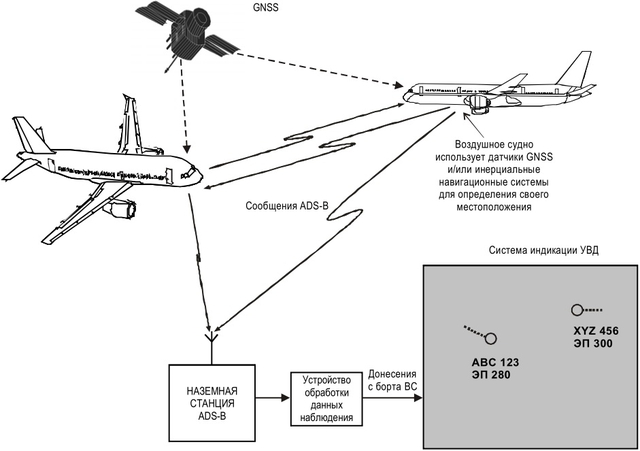
Рисунок 2 – Блок‐схема ADS‐B
5. Режим S, ES 1090 МГц (1090 ES)
Как видно из заголовка, средства 1090 ES разрабатывались в качестве составной части системы режима S. Стандартная длина самогенерируемого сигнала режима S, передаваемого с целью обнаружения, составляет 56 бит. Сигнал 1090 МГц ES содержит дополнительный 56‐битный блок данных с информацией ADS‐B. Длительность каждого сообщения ES составляет 120 мкс (8 мкс преамбулы и 12 мкс данных). Сигналы передаются на частоте 1090 МГц при скорости передачи данных 1 Мбит/с. Информация ADS‐B передается в виде отдельных сообщений, каждое из которых содержит соответствующий набор данных (например, местоположение и барометрическая высота воздушного судна, местоположение на поверхности, скорость, опознавательный индекс и тип воздушного судна, данные об аварийной обстановке). Данные о местоположении и скорости передаются два раза в секунду. Опознавательный индекс воздушного судна передается каждые 5 с. Передача сообщений ES средствами ADS‐B является функцией многих приемоответчиков режима S, хотя эту технологию могут также использовать и приемоответчики, не относящиеся к режиму S [2].
Существует международная договоренность о том, что сообщения ES режима S будут использоваться воздушными судами транспортной авиации во всем мире для обеспечения функционального взаимодействия по крайней мере на начальном этапе внедрения.
6. UAT
UAT представляет собой линию передачи авиационных данных общего назначения для направления по линии связи вверх
информации в дополнение к данным ADS‐B. Средство работает на частоте 978 МГц при скорости передачи информации 1 Мбит/с, как и у сообщений ES режима S. Каждому приемопередатчику UAT отводится временнoе окно
и канал MSO для передачи информации. Каналы могут распределяться в одном из двух сегментов: сегмент ADS‐B и наземный сегмент. Каналы в сегменте ADS‐B рассчитаны на сообщения длительностью 250 мкс и распределяются воздушным судам для передачи данных ADS‐B. Каналы в наземном сегменте резервируются для передачи наземной системой в радиовещательном режиме метеорологической и полетной информации (такая услуга называется FIS). Длительность передачи пакетов по каждому из этих каналов составляет 5,5 мс (22 MSO).
Поскольку каждому приемопередатчику UAT распределяется временнoе окно
, приемник может выполнять проверку дальности на основе времени получения сообщения в целях предварительной оценки передаваемых данных о местоположении. Эта характеристика позволяет воздушному судну, получающему сообщения TIS‐B, определить расстояние до наземной станции [2].
7. ОВЧ‐линия цифровой связи режима 4 (VDL режима 4)
Технология VDL режима 4 разрабатывалась в качестве линии передачи данных общего назначения для поддержки функций CNS. На начальном этапе она использовалась только в таких видах наблюдения, как ADS‐C и ADS‐B, однако позднее, после отмены нормативных ограничений, средства VDL режима 4 стали использовать в качестве линии передачи данных CNS. Система поддерживает радиовещательную и двухточечную связь воздух‐земля
и воздух‐воздух
. VDL режима 4 представляет собой узкополосную систему, работающую на нескольких каналах шириной 25 кГц в ОВЧ‐диапазоне (108‐137 МГц). Доступ к этим каналам синхронизируется относительно UTC и основан на самоорганизующейся схеме TDMA, позволяющей всем объектам связи выбирать свободные окна
для отправления сообщений. Имеется ряд протоколов для поддержки различных режимов связи [2].
8. Характеристики
Функциональные характеристики системы ADS‐B:
a) наземная станция проще, чем станции в системах первичной радиолокации, вторичной радиолокации и мультилатерации. Затраты на приобретение и установку одной системы ADS‐B значительно ниже. Во многих случаях средства могут устанавливаться на площадках, предназначенных для навигационных средств или ОВЧ‐радиосредств с уже существующей инфраструктурой;
b) каждое донесение о местоположении содержит указание о целостности данных, что позволяет пользователям определить, каким образом можно использовать эту информацию;
c) система поддерживает как наземные, так и бортовые виды наблюдения.
Недостатки системы ADS‐B:
a) она зависит от надлежащей оснащенности всех воздушных судов. Это может быть серьезной проблемой, так как требуется установка и сертификация навигационного средства, способного предоставлять информацию о местоположении и скорости наряду с указанием на целостность и точность такой информации;
b) существующие установки при получении данных о местоположении и скорости полагаются исключительно на GNSS. Поэтому возможны отказы в случаях, когда уровень характеристик или геометрия спутниковой группировки недостаточны для поддержки того или иного вида применения. Этот недостаток должен быть устранен в будущих системах, позволяющих интегрировать информацию GNSS с данными от других навигационных датчиков. Кроме того, появление системы Галилео
должно улучшить работу GNSS;
c) следует предусмотреть возможность проверки точности передаваемых данных о местоположении.
На рисунках 3, 4, 5, 6, проиллюстрировано принципы построения системы ADS‐B.
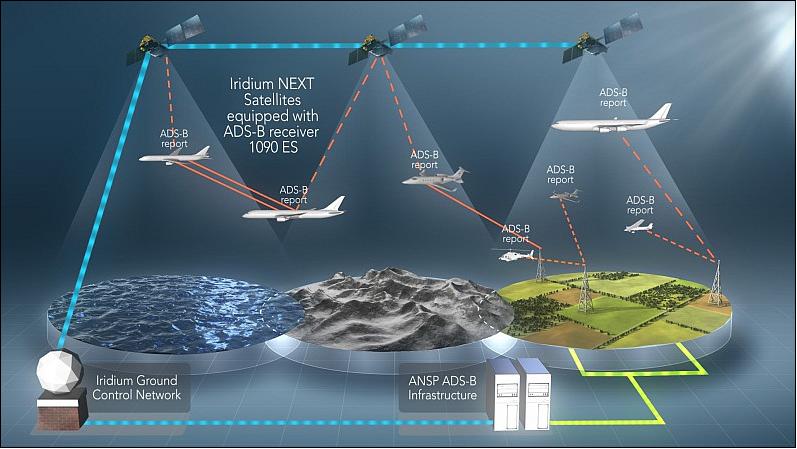
Рисунок 3 – Принцип построения системы ADS‐B
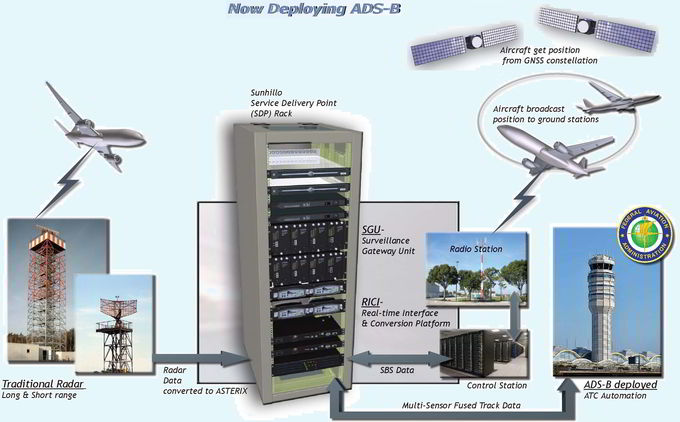
Рисунок 4 – Принцип построения системы ADS‐B

Рисунок 5 – Принцип построения системы ADS‐B
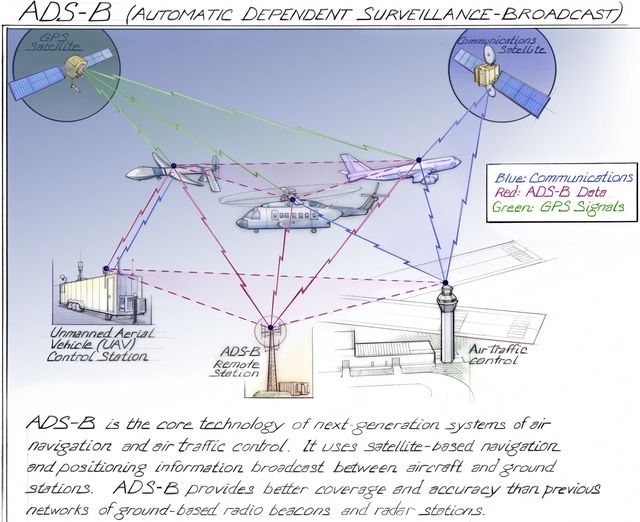
Рисунок 6 – Принцип построения системы ADS‐B
Список источников
- Alex Smith. ADS‐X extended ADS‐B surveillance. Rannoch Corporation, 2006.
- Система Автоматического Зависимого Наблюдения в Режиме Радиовещания (ADS‐B) для ведения наблюдения
ВОЗДУХ – ЗЕМЛЯ
[Электронный ресурс]. – Режим доступа: http://adsbradar.ru/AN-Conf_11-WP/127. - Cir 326. Оценка наблюдения с использованием систем ADS‐B и мультилатерации в целях обеспечения обслуживания воздушного движения и рекомендации по их внедрению. – ИКАО, 2013.
- ADS‐B. [Электронный ресурс]. – Режим доступа: http://era.aero/technology/ads-b-2/.
- ADS‐X. [Электронный ресурс]. – Режим доступа: http://era.aero/technology/ads-x/.
- Automatic Dependent Surveillance – Broadcast ( ADS‐B ) [Электронный ресурс]. – Режим доступа: http://era.aero/solutions/air-traffic-management/ads-b/.
- ADS‐B Технология (TIS‐B, FIS‐B) [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/ads-b_fis-b_tis-b_technology.
- ADS‐X – интеграция MLAT и ADS‐B систем [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/ads-b-mlat-ads-x.
- Всё про ADS‐B [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/adsb-technology.
- Automatic Dependent Surveillance – Rebroadcast ( ADS‐R ) [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/automatic-dependent-surveillance-rebroadcast-ads-r.
- ALAS [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/alas-ads-b-extension-with-globalstar-sat.
- Железо (Hardware) для ADS‐B [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/ads-b-hardware-receivers.