


Реферат по теме выпускной работы Использование сложных широкополосных сигналов в системе мультилатерации MLAT
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Описание системы мультилатерации MLAT
- 4. Принцип работы системы мультилатерации MLAT
- 5. Применение и характеристики типовой системы MLAT
- 6. Преимущества и недостатки системы мультилатерации MLAT
- Выводы
- Список источников
Введение
Мультилатерация представляет собой вид кооперативного и независимого наблюдения, при котором используются передаваемые воздушным судном сигналы (обычно ответы или самогенерируемые сигналы приемоответчика ВОРЛ на частоте 1090 МГц) для вычисления местоположения воздушного судна. Поскольку системы MLAT могут использовать уже применяемые в эксплуатации передачи сигналов с борта воздушных судов, они могут развертываться без каких‐либо изменений бортовой инфраструктуры.
Для обработки сигналов на земле требуются соответствующие приемные станции и центральная станция обработки сигналов.
Системы мультилатерации уже в течение длительного времени успешно используются для наблюдения в аэропортах. В настоящее время некоторые системы применяются в более обширных районах, например районах полетов по маршрутам или зонах подхода, и они называются системами WAM.
Мультилатерационная система MLAT представляет собой многопозиционную пассивную (или пассивно‐активную) РЛС, состоящую из нескольких приемных станций, станции обработки и контрольного ответчика. Мультилатерация или гиперболическое позиционирование — процесс определения положения, основанный на разнице во времени прибытия (Time Difference of Arrival (TDOA)) сигнала, излучаемого объектом в направлении трёх или более приемников.
1. Актуальность темы
В последнее десятилетие объем пассажирских и грузовых авиаперевозок неуклонно растет. Это приводит к повышению плотности воздушного движения, загруженности аэродромных зон и воздушных трасс. Также постоянно ужесточаются требования безопасности. Очевидно, что прежние системы управления воздушного движения (УВД) все менее и менее удовлетворяют современным требованиям. Поэтому, во всем мире ведутся разработки перспективных систем, учитывающих современные требования. Одной из таких систем является система мультилатерации MLAT.
Система мультилатерации MLAT представляет собой независимую кооперативную систему слежения нового уровня. Система используется с уже существующим оборудованием ВРЛ и не нуждается в дополнительной бортовой аппаратуре. Она не только гарантирует высокую точность определения местоположения и траектории, сравнимую с моноимпульсными вторичными обзорными радиолокаторами, но и представляет такие новые характеристики, как более высокая точность, скорость обновления и 3D слежение [3].
2. Цель и задачи исследования, планируемые результаты
Цель работы — использование сложных широкополосных сигналов в системе мультилатерации MLAT. Необходимо произвести внедрение сложных широкополосных сигналов (ШПС), в систему мультилатерации, и с их использованием осуществить качественный расчёт основных характеристик и параметров системы. С целью, получения качественного анализа и результатов использования (ШПС) в системах мультилатерации MLAT.
Необходимо осуществить моделирование и оптимизацию системы мультилатерации MLAT в программном продукте MatLab. С целью, получения результатов и анализа алгоритмов мультилатерационной обработки.
В заключении нужно произвести комплексный анализ полученных данных вычислений и данных моделирования системы, и оценить эффективность использования (ШПС) в системе мультилатерации.
3. Описание системы мультилатерации MLAT
Система MLAT предусматривает обнаружение сигналов приемоответчика воздушного судна рядом принимающих станций. В системах MLAT используется метод TDOA для установления поверхностей, представляющих постоянную разницу расстояний между целью и парами принимающих станций. Местоположение воздушного судна определяет точка пересечения таких поверхностей.
Теоретически мультилатерация может выполняться с использованием любых сигналов, периодически передаваемых с борта воздушного судна. Однако системы, используемые для гражданских целей, основаны только на сигналах приемоответчиков ВОРЛ. Система MLAT требует наличия, по крайней мере, четырех принимающих станций для расчета местоположения воздушного судна. Если известна барометрическая высота воздушного судна, то местоположение воздушного судна можно определить при наличии трех принимающих станций. Тем не менее на практике системы MLAT используют намного больше принимающих станций для обеспечения адекватных характеристик и зоны действия [2].
Точность MLAT не имеет линейной зависимости от размеров зоны действия. Она зависит от геометрического местоположения цели относительно принимающих станций и точности, с которой можно определить относительное время получения сигнала на каждой станции. Типичная архитектура системы MLAT для наблюдения в целях УВД приведена на рис. 1:
Рисунок 1 – Типичная архитектура системы MLAT для наблюдения в целях УВД
(анимация: 5 кадров, 7 циклов повторения, 157 килобайт)
Требование об опорном времени
Система MLAT должна использовать единое опорное время для определения относительного времени поступления сигнала на принимающие станции. Обычно это делается одним из двух способов:
- все полученные сигналы направляются в центральную обрабатывающую станцию для получения временнoй отметки по общим часам. В этом случае система должна вычислить время прохождения сообщения между каждой принимающей станцией и центральной станцией и внести соответствующие коррективы. Система передает сообщения между центральной и принимающими станциями для контроля и корректировки времени прохождения; или
- часы на всех приемниках синхронизируют по общему опорному времени (например, по GNSS) или с использованием передатчика в известном месте. Расстояние между таким передатчиком и принимающими станциями известно, так что с помощью отслеживания времени поступления сигналов от этого передатчика на каждую принимающую станцию можно вносить коррективы в целях поддержания синхронизации часов приемников [1].
Возможности запроса
Система MLAT может иметь передающие станции, способные запрашивать бортовые приемоответчики. Это может потребоваться в том случае, если в зоне действия системы нет других запросчиков, способных генерировать сигналы ответа ВОРЛ. Может также потребоваться получить код режима А, данные о барометрической высоте и, возможно, другую информацию о воздушном судне (через ответы в режиме S). Некоторые системы также используют запросы и последующие ответы для измерения расстояния от передающей станции до воздушного судна аналогично тому, как это делает радиолокатор. Такая дальномерная информация дополняет информацию TDOA системы мультилатерации.
Использование сообщений ES
Системы MLAT могут обрабатывать сигналы ES двумя способами:
- путем использования TDOA, как и с другими сигналами приемоответчика;
- путем декодирования сообщения для определения местоположения (широты и долготы) воздушного судна, барометрической высоты и скорости.
Таким образом, MLAT является переходным этапом к системе, в рамках которой большинство воздушных судов будут оборудованы средствами ADS‐B.
Виды применения
Системы мультилатерации могут использоваться для наблюдения за движением на поверхности аэропорта, в зоне аэродрома и при полете по маршруту. Ее применение для наблюдения за движением на поверхности зависит от того, работают ли бортовые приемоответчики на земле. На многих воздушных судах работа приемоответчика контролируется датчиком обжатия стоек, также именуемым переключателем датчика. Приемоответчики режима S продолжают передавать самогенерируемые сигналы и могут получать селективные запросы, находясь на земле. Однако часто приемоответчикам режима А/С запрещают отвечать на запросы во время нахождения воздушного судна на земле, чтобы уменьшить помехи для расположенных поблизости радиолокационных систем.
4. Принцип работы системы мультилатерации MLAT
Система MLAT состоит из нескольких антенн, принимающих сигнал от воздушного судна, и центрального процессора, вычисляющего местоположение воздушного судна по значениям TDOA сигнала на различных антеннах.
Математически TDOA между двумя антеннами соответствует гиперболоиду (в трех координатах пространства), на котором находится воздушное судно. В том случае, когда сигнал воздушного судна принимают четыре антенны, можно определить три координаты местоположения воздушного судна, рассчитав пересечение результирующих гипербол.
Когда имеется только три антенны, три координаты местоположения невозможно определить непосредственно, однако, если из другого источника (например, по данным режима C или при нахождении воздушного судна на земле) известна его абсолютная высота, то можно рассчитать местоположение воздушного судна. Такая ситуация обычно называется как 2‐мерное решение. Следует отметить, что использование барометрической абсолютной высоты (режим С) может стать причиной менее точного значения местоположения цели, поскольку барометрическая абсолютная высота может значительно отличаться от геометрической относительной высоты [6].
При наличии более четырех антенн дополнительная информация может использоваться либо для проверки правильности других измерений, либо для расчета среднего местоположения по всем измерениям, которое должно иметь меньшую суммарную погрешность. Приведенный на рис. 2 пример поясняет данный принцип. Показана система WAM, включающая пять приемных станций (с номерами 0–4).
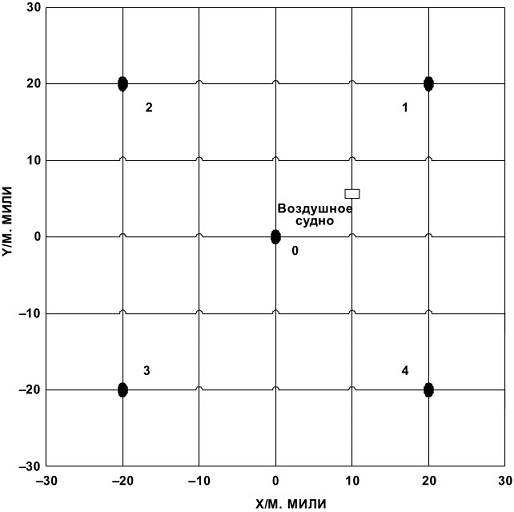
Рисунок 2 – Схема из пяти приемных станций
Предполагая, что сигнал воздушного судна принимается всеми станциями, первые три диаграммы на рис. 3 представляют собой гиперболоиды, соответствующие TDOA сигнала на станциях 0 и 2, 0 и 3, 0 и 4 соответственно. Как показано на последней диаграмме, центральная вычислительная станция рассчитывает пересечение всех гиперболоидов. Связанные с мультилатерацией вычисления могут иметь более одного решения, поскольку гиперболоиды могут пересекаться в двух местах. Правильное решение обычно легко определяется [6].
В общем случае геометрия системы оказывает большое влияние на получаемую точность. Пока воздушное судно находится внутри 2‐мерной зоны вокруг наземных антенн, рассчитываемое местоположение будет наиболее точным; за пределами этой зоны точность будет быстро ухудшаться.
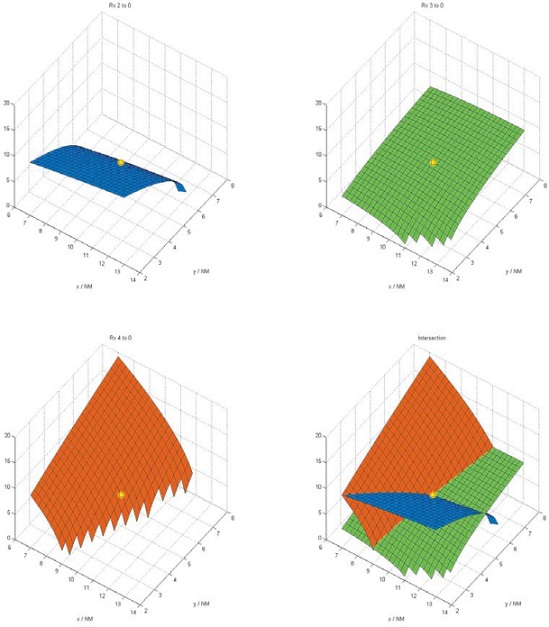
Рисунок 3 – Пересекающиеся гиперболоиды
Системы MLAT можно разделить на активные и пассивные. Пассивная система включает только приемники, а активная система имеет одну или несколько передающих антенн для запроса бортового приемоответчика ВОРЛ. Основное преимущество активной системы заключается в том, что она не зависит от других источников инициирования передачи данных с борта воздушного судна. Главный ее недостаток связан с тем, что она создает дополнительные помехи на каналах 1030 МГц и 1090 МГц [6].
5. Применение и характеристики типовой системы MLAT
Применение систем мультилатерации.
Мультилатерационные приложения УВД:
В общих чертах, приложения УВД на основе мультилатерации подразделяются на несколько направлений:
— аэродромные приложения наземного движения для наземного и аэродромного управления;
— зональный обзор и обзор захода на посадку в воздушном пространстве с радиолокационным обзором;
— зональный обзор и обзор захода на посадку в воздушном пространстве без радиолокационного обзора;
— технические улучшения системы УВД, включая выборку параметров RVSM и выборку параметров ADS‐B.
Приложения специфического применения MLAT:
— обзор наземной поверхности аэропорта; и данные, генерируемые ЛА, для наземных средств УВД;
— ситуационная осведомленность;
— аэродромные операции при низкой видимости;
— контроль захода на посадку на параллельных ВПП;
— для других приложений: управление наклоном глиссады/управление порогом ВПП;
— обеспечение данных для контроля шума;
— данные для использования в аэропорту;
— данные для использования на воздушной трассе;
— сопровождение полета;
— расширенная ситуационная осведомленность (пометка преград, запрещенные зоны);
— расширенные данные всего полета для улучшенных поисковых и обзорных действий.
Характеристики типовой системы MLAT, представлены на рис. 4:
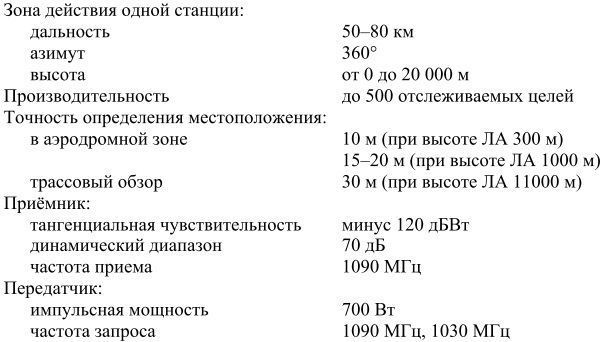
Рисунок 4 – Характеристики типовой системы MLAT
6. Преимущества и недостатки системы мультилатерации MLAT
Преимущества. Функциональные возможности системы мультилатерации:
a) использование любых сигналов (режим A/C, ответы и самогенерируемые сигналы режима S), передаваемых существующими приемоответчиками, при этом не требуется установки на борту дополнительного оборудования для определения местоположения воздушного судна;
b) возможности режима A/C, режима S и ADS‐B;
c) обеспечение зоны действия на пересеченной местности. Система является модульной в том смысле, что зону действия можно расширить за счет включения дополнительных станций при условии, что общее количество станций не выходит за рамки, условленные технологическими возможностями системы;
d) высокие показатели точности и частоты обновления. Точность системы можно также в определенной степени контролировать путем размещения принимающих станций.
Недостатки системы мультилатерации:
a) воздушные суда должны быть оборудованы работоспособным приемоответчиком;
b) передаваемый сигнал должен быть правильно обнаружен многими принимающими станциями.
В этой связи могут возникать проблемы, связанные с поиском подходящих мест для установки приемников, особенно при предоставлении обслуживания на маршруте;
c) требуются линии связи между удаленными установками приемников/передатчиков и главным центром обработки данных [7].
Выводы
Данная магистерская работа посвящена архиактуальной научно‐технической задаче исследования систем мультилатерации, применимых в гражданской авиации в наши дни, в которых основными требованиями являются высокая точность и частота обновления.
Замечание. При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2014 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Wide Area Multilateration. Report on EATMP TRS 131/04. Version 1.1., 2005.
- IKAO. Multilateration. Conception of use, 2009.
- Документ ИКАО по мультилатерации. – Монреаль, 2008.
- Cir 326. Оценка наблюдения с использованием систем ADS‐B и мультилатерации в целях обеспечения обслуживания воздушного движения и рекомендации по их внедрению. – ИКАО, 2013.
- Зайцев Д.В. Многопозиционные радиолокационные системы. Москва., «Радиотехника»., – 2007.
- Multilateration – MLAT [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/ads-b-multilateration-mlat.
- Multilateration [Электронный ресурс]. – Режим доступа: http://adsbradar.ru/crosstags/multilateration.
- NEO by ERA – COMPOSITE MULTILATERATION AND ADS‐B SURVEILLANCE [Электронный ресурс]. – Режим доступа: http://era.aero/products/neo-by-era/.
- Surveillance. Multilateration. [Электронный ресурс]. – Режим доступа: http://www.multilateration.com/surveillance/multilateration.html.
- Широкое внедрение мультилатерации. [Электронный ресурс]. – Режим доступа: http://orfei-travel.ru/article/powerful-surveillance-solutions.html.