


Реферат за темою випускної роботи Використання складних широкосмугових сигналів у системі мультілатерації MLAT
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, плановані результати
- 3. Опис системи мультілатерації MLAT
- 4. Принцип роботи системи мультілатерації MLAT
- 5. Застосування та характеристики типової системи MLAT
- 6. Переваги та недоліки системи мультілатерації MLAT
- Висновки
- Перелік джерел
Вступ
Мультілатерація являє собою вид кооперативного і незалежного спостереження, при якому використовуються передані повітряним судном сигнали (зазвичай відповіді або самогенеровані сигнали прийомовідповідача ВОРЛ на частоті 1090 МГц) для обчислення місцезнаходження повітряного судна. Оскільки системи MLAT можуть використовувати вже вживані в експлуатації передачі сигналів з борту повітряних суден, вони можуть розгортатися без будь‐яких змін бортової інфраструктури.
Для обробки сигналів на землі потрібні відповідні приймальні станції і центральна станція обробки сигналів.
Системи мультілатерації вже протягом тривалого часу успішно використовуються для спостереження в аеропортах. В даний час деякі системи застосовуються в більш великих районах, наприклад районах польотів за маршрутами або зонах підходу, і вони називаються системами WAM.
Мультілатераційна система MLAT являє собою багатопозиційну пасивну (або пасивно‐активну) РЛС, що складається з декількох приймальних станцій, станції обробки та контрольного відповідача. Мультілатерація або гіперболічне позиціонування — процес визначення положення, заснований на різниці в часі прибуття (Time Difference of Arrival (TDOA)) сигналу, випромінюваного об’єктом у напрямку трьох або більше приймачів.
1. Актуальність теми
В останнє десятиліття обсяг пасажирських і вантажних авіаперевезень неухильно зростає. Це призводить до підвищення щільності повітряного руху, завантаженості аеродромних зон і повітряних трас. Також постійно посилюються вимоги безпеки. Очевидно, що колишні системи управління повітряного руху (УПР) все менш і менш задовольняють сучасним вимогам. Тому, в усьому світі ведуться розробки перспективних систем, що враховують сучасні вимоги. Однією з таких систем є система мультілатерації MLAT.
Система мультілатерації MLAT являє собою незалежну кооперативну систему стеження нового рівня. Система використовується з вже існуючим обладнанням ВРЛ і не потребує додаткової бортової апаратури. Вона не тільки гарантує високу точність визначення місця розташування і траєкторії, порівняно з моноімпульсними вторинними оглядовими радіолокаторами, а й представляє такі нові характеристики, як більш висока точність, швидкість оновлення і 3D стеження [3].
2. Мета і задачі дослідження, плановані результати
Мета роботи — використання складних широкосмугових сигналів у системі мультілатерації MLAT. Необхідно зробити впровадження складних широкосмугових сигналів (ШПС), в систему мультілатерації, і з їх використанням здійснити якісний розрахунок основних характеристик і параметрів системи. З метою, отримання якісного аналізу та результатів використання (ШПС) в системах мультілатерації MLAT.
Необхідно здійснити моделювання та оптимізацію системи мультілатерації MLAT в програмному продукті MatLab. З метою, отримання результатів та аналізу алгоритмів мультілатераційного обробітку.
По завершенню роботи, потрібно провести комплексний аналіз отриманних данних обчислень і данних моделювання системи, і оцінити ефективність використання (ШПС) у системі мультілатерації.
3. Опис системи мультілатерації MLAT
Система MLAT передбачає виявлення сигналів прийомовідповідача повітряного судна поруч приймальних станцій. У системах MLAT використовується метод TDOA для встановлення поверхонь, що представляють постійну різницю відстаней між ціллю та парами приймальних станцій. Місцезнаходження повітряного судна визначає точка перетину таких поверхонь.
Теоретично мультілатерація може виконуватися з використанням будь‐яких сигналів, періодично переданих з борту повітряного судна. Однак системи, використовувані для цивільних цілей, засновані тільки на сигналах прийомовідповідачів ВОРЛ. Система MLAT вимагає наявність, не меньше, чотирьох прийомних станцій для розрахунку місцезнаходження повітряного судна. Якщо відома барометрична висота повітряного судна, то місцезнаходження повітряного судна можна визначити за наявності трьох приймаючих станцій. Проте на практиці системи MLAT використовують набагато більше приймаючих станцій для забезпечення адекватних характеристик і зони дії [2].
Точність MLAT не має лінійної залежності від розмірів зони дії. Вона залежить від геометричного розташування цілі щодо приймаючих станцій і точності, з якою можна визначити відносний час отримання сигналу на кожній станції. Типова архітектура системи MLAT для спостереження в цілях УПР приведена на рис. 1:
Рисунок 1 – Типова архітектура системи MLAT для спостереження в цілях УПР
(анімація: 5 кадрів, 7 циклів повторень, 157 кілобайт)
Вимоги до опорного часу
Система MLAT повинна використовувати єдиний опорний час для визначення відносного часу надходження сигналу на приймаючій станції. Зазвичай це робиться одним із двох способів:
- усі отримані сигнали направляються в центральну станцію обробки для отримання часової позначки по загальним часам. У цьому випадку система повинна обчислити час проходження повідомлення між кожною приймаючою станцією і центральною станцією і внести відповідні корективи. Система передає повідомлення між центральною та приймаючими станціями для контролю і коректування часу проходження; або
- годинник на всіх приймачах синхронізують за загальним опорним часом (наприклад, по GNSS) або з використанням передавача у відомому місці. Відстань між таким передавачем та приймаючими станціями відомо, так що за допомогою відстеження часу надходження сигналів від цього передавача на кожну приймаючу станцію можна вносити корективи в цілях підтримки синхронізації годин приймачів [1].
Можливості запиту
Система MLAT може мати передавальні станції, здатні запитувати бортові прийомовідповідачі. Це може знадобитися в тому випадку, якщо в зоні дії системи немає інших запитувачів, здатних генерувати сигнали відповіді ВОРЛ. Може також знадобитися отримати код режиму А, дані про барометричну висоту і, можливо, іншу інформацію про повітряне судно (через відповіді в режимі S). Деякі системи також використовують запити і наступні відповіді для вимірювання відстані від передавальної станції до повітряного судна аналогічно тому, як це робить радіолокатор. Така далекомірна інформація доповнює інформацію TDOA системи мультілатерації.
Використання повідомлень ES
Системи MLAT можуть обробляти сигнали ES двома способами:
- шляхом використання TDOA, як і з іншими сигналами прийомовідповідача;
- шляхом декодування повідомлення для визначення місцерозташування (широти і довготи) повітряного судна, барометричної висоти і швидкості.
Таким чином, MLAT є перехідним етапом до системи, в рамках якої більшість повітряних суден будуть обладнані засобами ADS‐B.
Види застосування
Системи мультілатерації можуть використовуватися для спостереження за рухом на поверхні аеропорту, в зоні аеродрому і при польоті по маршруту. Її застосування для спостереження за рухом на поверхні залежить від того, чи працюють бортові прийомовідповідачі на землі. На багатьох повітряних судах робота прийомовідповідачів контролюється датчиком обтиску стійок, також має назву перемикачем датчика. Прийомовідповідачі режиму S продовжують передавати самогенеровані сигнали і можуть отримувати селективні запити, перебуваючи на землі. Однак часто прийомовідповідачам режиму А/С забороняють відповідати на запити під час знаходження повітряного судна на землі, щоб зменшити перешкоди для розташованих поблизу радіолокаційних систем.
4. Принцип роботи системи мультілатерації MLAT
Система MLAT складається з декількох антен, які приймають сигнал від повітряного судна, і центрального процесора, що обчислює розташування повітряного судна за значеннями TDOA сигналу на різних антенах.
Математично TDOA між двома антенами відповідає гіперболоїду (у трьох координатах простору), на якому знаходиться повітряне судно. У тому випадку, коли сигнал повітряного судна приймають чотири антени, можна визначити три координати місцезнаходження повітряного судна, розрахувавши перетин результуючих гіпербол.
Коли є тільки три антени, три координати місцезнаходження неможливо визначити безпосередньо, однак, якщо з іншого джерела (наприклад, за даними режиму C або при знаходженні повітряного судна на землі) відома його абсолютна висота, то можна розрахувати місцезнаходження повітряного судна. Така ситуація звичайно називається як 2‐мірне рішення. Слід зазначити, що використання барометричної абсолютної висоти (режим С) може стати причиною меньш точного розрахунку місцезнаходження цілі, оскільки барометрична абсолютна висота може значно відрізнятися від геометричної відносної висоти [6].
При наявності більш ніж чотирьох антен, додаткова інформація може використовуватися або для перевірки правильності інших вимірів, або для розрахунку середнього місцезнаходження по всіх вимірах, яке повинно мати меньшу сумарну похибку. Приведений на рис. 2 приклад пояснює данний принцип. Показана система WAM, що включає п’ять прийомних станцій (з номерами 0–4).
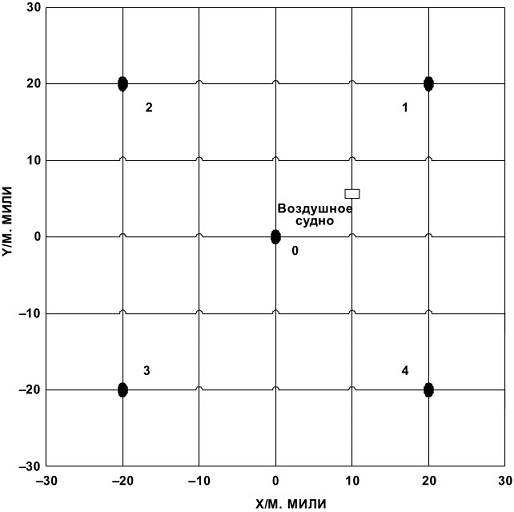
Рисунок 2 – Схема з п’яти прийомних станцій
Припускаючи, що сигнал повітряного судна приймається усіма станціями, перші три діаграми на рис. 3 являють собою гіперболоїди, відповідні TDOA сигналу на станціях 0 і 2, 0 і 3, 0 і 4 відповідно. Як показано на останній діаграмі, центральна обчислювальна станція розраховує перетин усіх гіперболоїдів. Пов’язані з мультілатераціею обчислення можуть мати більше одного рішення, оскільки гіперболоїди можуть перетинатися в двох місцях. Правильне рішення зазвичай легко визначається [6].
У загальному випадку геометрія системи робить великий вплив на отримувану точність. Поки повітряне судно знаходиться всередині 2‐мірної зони навколо наземних антен, то таке розрахування місцезнаходження буде найбільш точним, за межами цієї зони точність буде швидко погіршуватися.
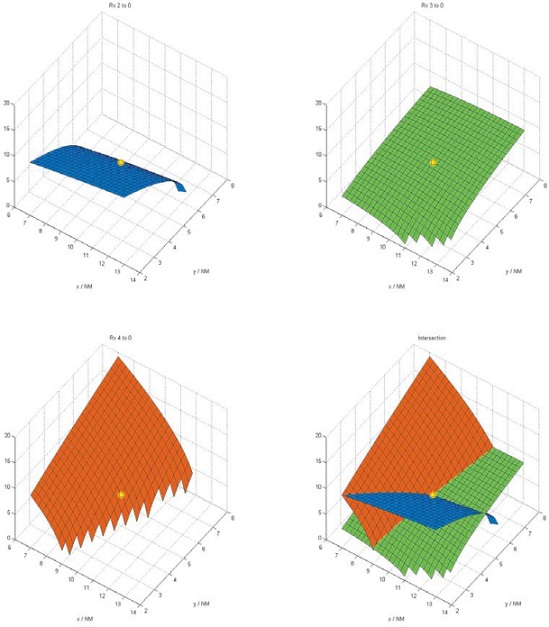
Рисунок 3 – Пересічні гіперболоїди
Системи MLAT можна розділити на активні і пасивні. Пасивна система включає тільки приймачі, а активна система має одну або кілька передавальних антен для запиту бортового прийомовідповідача ВОРЛ. Основна перевага активної системи полягає у тому, що вона не залежить від інших джерел ініціювання передачі данних з борту повітряного судна. Головний її недолік пов’язаний з тим, що вона створює додаткові перешкоди на каналах 1030 МГц і 1090 МГц [6].
5. Застосування та характеристики типової системи MLAT
Застосування систем мультілатерації.
Мультілатераційні додатки УВС:
У загальних рисах, додатки УВС на основі мультілатерації підрозділяються на кілька напрямків:
— аеродромні додатки наземного руху для наземного і аеродромного управління;
— зональний огляд і огляд заходу на посадку в повітряному просторі з радіолокаційним оглядом;
— зональний огляд і огляд заходу на посадку в повітряному просторі без радіолокаційного огляду;
— технічні поліпшення системи УВС, включаючи вибірку параметрів RVSM і вибірку параметрів ADS‐B.
Додатки специфічного застосування MLAT:
— огляд наземної поверхні аеропорту; і дані, що генеруються ЛА, для наземних засобів УВС;
— ситуаційна обізнаність;
— аеродромні операції при низькій видимості;
— контроль заходу на посадку на паралельних ЗПС;
— для інших додатків: управління нахилом глісади/керування порогом ЗПС;
— забезпечення данних для контролю шуму;
— дані для використання в аеропорту;
— дані для використання на повітряній трасі;
— супровід польоту;
— розширена ситуаційна обізнаність (позначка перепон, заборонені зони);
— розширені дані усього польоту для поліпшення пошукових та оглядових дій.
Характеристики типової системи MLAT, представлені на рис. 4:
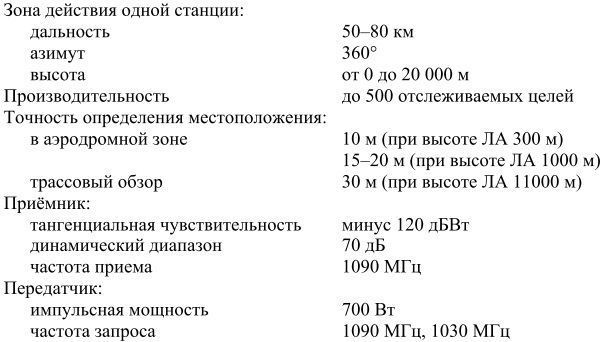
Рисунок 4 – Характеристики типової системи MLAT
6. Переваги та недоліки системи мультілатерації MLAT
Переваги. Функціональні можливості системи мультілатерації:
a) використання будь‐яких сигналів (режим A/C, відповіді та самогенеровані сигнали режиму S), переданних існуючими прийомовідповідачами, при цьому не вимагається встановлення на борту додаткового обладнання для визначення місцезнаходження повітряного судна;
b) можливості режиму A/C, режиму S і ADS‐B;
c) забезпечення зони дії на пересіченній місцевості. Система є модульною в тому сенсі, що зону дії можна розширити за рахунок включення додаткових станцій за умови, що загальна кількість станцій не виходить за рамки, домовлені технологічними можливостями системи;
d) високі показники точності і частоти оновлення. Точність системи можна також певною мірою контролювати шляхом розміщення прийомних станцій.
Недоліки системи мультілатерації:
a) повітряні судна повинні бути обладнані працездатним прийомовідповідачем;
b) переданний сигнал повинен бути правильно виявлений багатьма приймальними станціями.
У цьому зв’язку можуть виникати проблеми, пов’язані з пошуком підходящих місць для установки приймачів, особливо при наданні обслуговування на маршруті;
c) потрібні лінії зв’язку між віддаленими установками приймачів/передавачів і головним центром обробітку данних [7].
Висновки
Данна магістерська робота присвячена архіактуальним науково‐технічним задачам дослідження систем мультілатерації, застосовуваних в цивільній авіації в наші дні, в яких основними вимогами є висока точність і частота оновлення.
Зауваження. При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2014 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік джерел
- Wide Area Multilateration. Report on EATMP TRS 131/04. Version 1.1., 2005.
- IKAO. Multilateration. Conception of use, 2009.
- Документ ИКАО по мультилатерации. – Монреаль, 2008.
- Cir 326. Оценка наблюдения с использованием систем ADS‐B и мультилатерации в целях обеспечения обслуживания воздушного движения и рекомендации по их внедрению. – ИКАО, 2013.
- Зайцев Д.В. Многопозиционные радиолокационные системы. Москва., «Радиотехника»., – 2007.
- Multilateration – MLAT [Електронний ресурс]. – Режим доступу: http://adsbradar.ru/ads-b-multilateration-mlat.
- Multilateration [Електронний ресурс]. – Режим доступу: http://adsbradar.ru/crosstags/multilateration.
- NEO by ERA – COMPOSITE MULTILATERATION AND ADS‐B SURVEILLANCE [Електронний ресурс]. – Режим доступу: http://era.aero/products/neo-by-era/.
- Surveillance. Multilateration. [Електронний ресурс]. – Режим доступу: http://www.multilateration.com/surveillance/multilateration.html.
- Широкое внедрение мультилатерации. [Електронний ресурс]. – Режим доступу: http://orfei-travel.ru/article/powerful-surveillance-solutions.html.