


An essay on the topic of the graduation work The use of complex wideband signals in the multilateration system MLAT
Contents
- Introduction
- 1. Relevance of the topic
- 2. Purpose and objectives of the research work, the expected results
- 3. Description of the multilateration system MLAT
- 4. How the multilateration system MLAT works
- 5. Application and characteristics of the typical system MLAT
- 6. Advantages and disadvantages of the multilateration system MLAT
- Conclusion
- Bibliography
Introduction
Multilateration is a type of cooperative and independent tracking, which uses the signals transmitted by an aircraft (they are usually the responses or self‐regulating signals of SSR transponder on the frequency of 1090 MHz), which is used in order to indicate the position of an aircraft. As the systems MLAT can use the already used signaling from aircrafts, they can be deployed without any changes of the aircraft infrastructure.
So as to process the signals on the earth one needs relevant receiving stations and central signal processing station.
Airports have already been using the multilateration system successfully for a long time. At present some of the systems are used in more spacious areas, for example in the areas of flight routs or approach zones and they are called WAM systems.
The multilateration system MLAT is a multi‐positional passive (or passive and active) radar station, which consists of several receiving stations, a processing station and a test responder. Multilateration or hyperbolic positioning is a process of position determination which is based on the time difference of the signal arrival (TDOA) radiated by an object in the direction of three or more receivers.
1. Relevance of the topic
Over the last decade the performance of air passenger and cargo traffic is growing steadily. It results in the increase of air traffic density, airport and air routes workload. The safety requirements are constantly becoming stricter. It is obvious that old air traffic control systems (ATC) are not able to meet the modern requirements. That is why the countries all over the world are working on the development of perspective systems which meet modern requirements. The multilateration system MLAT is one of such systems.
The multilateration system MLAT is a type of cooperative and independent tracking system of a new level. The system uses the existing equipment SSR and does not require additional on‐board equipment. It does not only ensure high positioning and trajectory accuracy which is only comparable to monopulse secondary radar but has such new characteristics as high pin‐point accuracy, refresh rate and 3D tracking.
2. Purpose and objectives of the research work, the expected results
The purpose of the work is to study the use of complex wideband signals in the multilateration system MLAT. It is necessary to implement the complex wide band signals (NLS) in the multilateration system and calculate the basic characteristics and parameters of the system in order to make a qualitative analysis of the results of the NLS use in the multilateration system MLAT.
It is necessary to simulate and optimize the multilateration system MLAT in the software MatLab in order to get the results and analyze the algorithms of the multilateration processing.
Finally, it is necessary to make a comprehensive analysis of the computation data and system simulation data and evaluate the efficiency of the NLS use in the multilateration system.
3. Description of the multilateration system MLAT
MLAT system is used to detect the signals of an aircraft transponder by a nearby receiving station. MLAT systems use TDOA method in order to identify the surfaces which have a constant difference of the distance between the target and the pairs of the receiving stations. The air craft position is determined by the point of intersection of such surfaces.
Theor etically, multilateration can be performed by using any signals periodically transmitted from an aircraft. How ever, the systems used for civil purposes are only based on SSR transponder signals. MLAT system requires to have at least four receiving stations for calculating the position of the aircraft. If one knows the pressure altitude of an aircraft, the aircraft position can be determined having the receiving stations. Never the less, in practice MLAT systems use many more receiving stations in order to ensure proper characteristics and coverage.
The accuracy of MLAT does not have any relation to the coverage. It depends on the geometric location of the target referred to the receiving stations and accuracy of determining the relative time needed to receive a signal at every station. A typical system architecture for MLAT surveillance for ATC is shown in pic. 1:
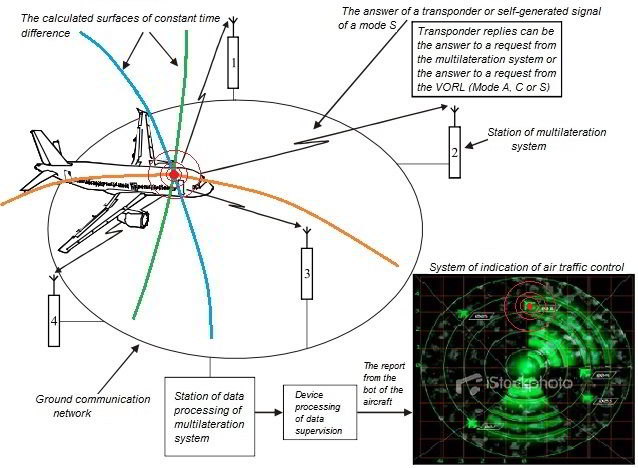
Pic. 1 – A typical system architecture for MLAT surveillance for ATC
The requirement to the reference time
MLAT system is to use single reference time in order to determine the up‐time ratio needed for a signal to reach the receiving station. It is usually done by using one of two methods:
- all the received signals are sent to the central processing station in order to receive a time-stamp according to a common clock. In such a case the system is to calculate the time needed for a signal to cover the distance between each receiving station and the central one. Also, it is to make appropriate corrections. The system transmits a signal between the central and receiving stations in order to control and correct the time needed for that;
- the clocks on all the receivers are synchronized according to the common reference time (for example, according to GNSS) or by means of using a transmitter in a known location. The distance between such a transmitter and the receiving stations is known. Thus, it makes it possible to determine the time needed for a signal to reach each receiving station and make any necessary corrections in order to synchronize the clocks of the receiving stations.
The query capabilities
MLAT system can have transmitting stations capable of querying the on board transponders. It may be necessary if the zone of the performing system does not have any other interrogators which are capable of generating SSR reply signals. It may be necessary to receive the code for Mode A, the data on the barometric altitude or any other information on the aircraft (by means of responses in Mode S). Some systems also use requests and subsequent responses in order to measure the distance between the transmitting stations to an aircraft in the same way as it is done by the radar. Such range‐measurement information supplements TDOA information of the multilateration system.
The use of ES messages
MLAT systems can process ES signals by using two methods:
- by means of using TDOA as well as other transponder signals;
- by means of decoding the messages in order to determine the location (latitude and longitude) of the aircraft, the pressure altitude and velocity.
Thus, MLAT is a transitional stage to the system where the majority of the crafts will be equipped with ADS‐B means.
The uses
The Multilateration systems can be used to monitor the traffic on the airport surface, in the airport zone an den route. It suse so as to monitor the traffic on the surface depend son the fact whether the airborne transponders operate on the ground on do not. On many aircrafts the transponder operation is controlled by the sensor of WOW which is also known as a sensor switch. The transponders of Mode S continue to transmit self‐adjusting signals and can receive selective queries being on the ground. However, the transponders of ModeА/С are often prohibited to respond the queries while the aircraft is on the ground in order to reduce interference for the nearby radar systems.
4. How the multilateration system MLAT works
MLAT system consists of several antennas which receive a signal from an aircraft and central processor which determines the location of the aircraft using the values of TDOA signal on different antennas.
Mathematically TDOA between two antennas corresponds with hyperboloid (in three space coordinates) on which the aircraft is located. When the signal of the aircraft is received by four antennas, it is possible to determine three coordinates of the aircraft location by calculating the intersection of the resultant hyperbolas.
When there are only three antennas it is impossible to determine the coordinates of the location directly. However, if we know its absolute altitude by using a different source (for example, according to the data of Mode C or if the aircraft is on the ground), it is possible to calculate the aircraft location. Such a situation is usually referred to as a two‐dimensional solution. It should be noted that the use of barometric absolute altitude (Mode C) can cause a less precise value of the aircraft location as the barometric altitude can differ considerably from the geometric relative one.
Having more than four antennas enables to get additional information which can be used in order to check how correct other measurements are or to calculate the average location according to all the measurements, that should have a smaller gross error. The given in pic. 2 example clarifies the given principle. WAM system is shown; it has five receiving stations (numbered 0–4).
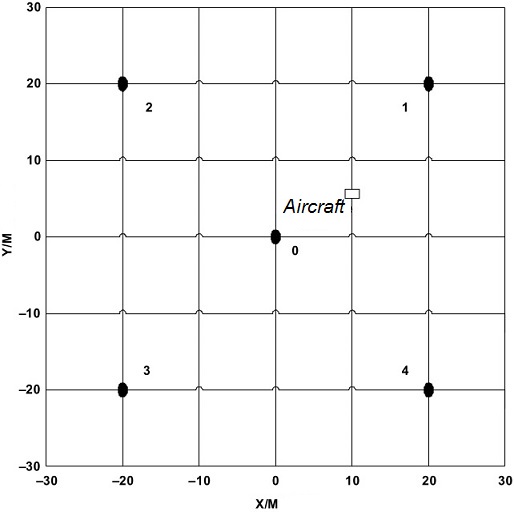
Pic. 2 – The chart with five receiving stations
If we assume that the signal of the aircraft is received by all the stations, the first three diagrams in pic. 3 are hyperboloids which correspond with TDOA signal on stations 0 and 2, 0 and 3, 0 and 4 respectively. As it is shown in the diagram, the central computing station calculates the intersection of all the hyperboloids. Related to multilateration calculations can have more than one solution as the hyperboloids can have several intersections. The correct solution can be easily found.
In general the geometry of the system has a big impact on the accuracy. While the aircraft is within a 2‐dimensional area around the ground antennas, the calculated location will be the most accurate one; outside this area the accuracy will deteriorate considerably.
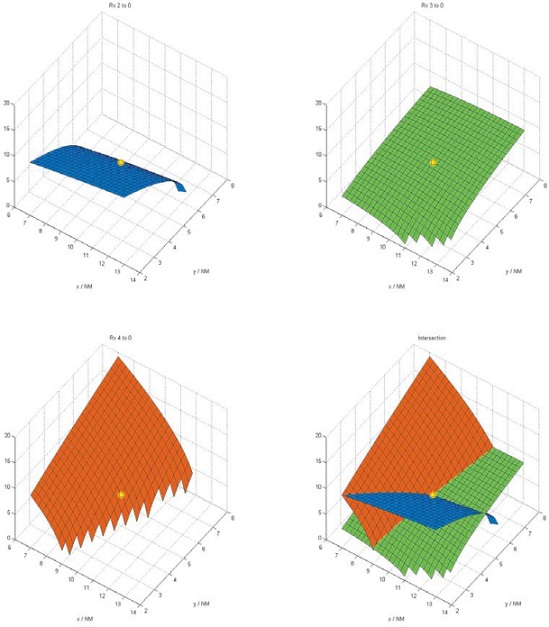
Pic. 3 – Intersecting hyperboloids
MLAT system can be divided into active and passive ones. The passive system only includes receivers, but the active one has one or several antennas for requesting SSR board transponder. The main advantage of the active system is that it does not depend on other sources of initiating the transmission of the data from the aircraft. Its main disadvantage is that it creates additional interference on 1030 MHz and 1090 MHz channels.
5. Application and characteristics of the typical MLAT system
Application of the multilateration system.
Multilateration ATC applications:
In general Multilateration ATC application sare divided into several types:
— air field applications of ground traffic for ground and airfield control;
— zonal view and landing approach view in the air area with radar view;
— zonal view and landing approach view in the air area without radar view;
— technical improvements of the ATC system including sampling RVSM and ADS‐B parameters.
Specific MLAT applications:
— view of ground surface of the airport, the data generated by the aircraft for ground‐based LTC;
— situational awareness;
— air field activities under low visibility;
— control of landing approach at the parallel runways;
— for other applications: glide slope control/control of the runway threshold;
— providing with the data for noise control;
— the data to be used at the airport;
— the data to be used in the airway;
— support of the flights;
— enhanced situational awareness (barrier marks, restricted areas);
— extended flight data for improved search and survey operations.
The characteristics of typical MLAT system is shown in pic. 4:
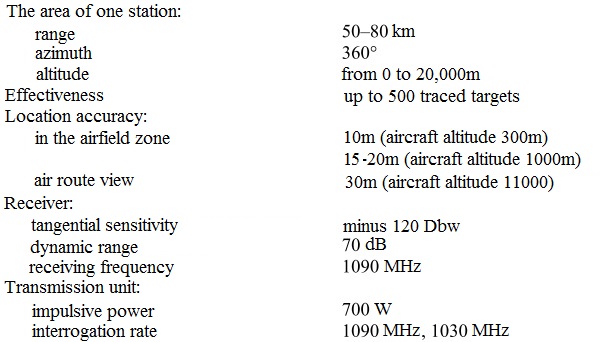
Pic. 4 – The characteristics of typical MLAT system
6. Advantages and disadvantages of the multilateration system MLAT
Advantages. Functional possibilities of multilateration system:
a) the use of any kind of signals (Mode A/C, responses and self‐regulating signals of Mode S), which are transmitted by the existing transponders, which does not require the installation of supplementary equipment on the aircraft in order to determine the aircraft location;
b) the possibilities of Mode A/C, Mode S and ADS‐B;
c) providing coverage on rough terrain. The system is a modular one as the coverage can be extended by including additional stations providing that the total number of the stations is not beyond the technological possibilities of the system;
d) the high accuracy and update rate. The accuracy of the system can be also controlled by locating the receiving stations.
Disadvantages of multilateration system:
a) an aircraft must be equipped by an operable transponder;
b) the transmitting signal must be correctly identified by many receiving stations.
That is why there can be problems which are related to the search of suitable places for the receivers, especially when the route is served;
c) communication lines are needed between the distant receivers/transmitters and the main center of data processing.
Conclusion
The given work for Master’s degree is devoted to architect scientific and technical task of the research of multilateration systems which are used in civil aviation nowadays as its main requirements are high accuracy and refresh rate.
Remark. In writing this essay master's work is not yet complete. Final completion: December 2014. Full text of the work and materials on the topic can be obtained from the author or his supervisor after that date.
Bibliography
- Wide Area Multilateration. Report on EATMP TRS 131/04. Version 1.1., 2005.
- IKAO. Multilateration. Conception of use, 2009.
- Документ ИКАО по мультилатерации. – Монреаль, 2008.
- Cir 326. Оценка наблюдения с использованием систем ADS‐B и мультилатерации в целях обеспечения обслуживания воздушного движения и рекомендации по их внедрению. – ИКАО, 2013.
- Зайцев Д.В. Многопозиционные радиолокационные системы. Москва., «Радиотехника»., – 2007.
- Multilateration – MLAT [Electronic resource]. – Access mode: http://adsbradar.ru/ads-b-multilateration-mlat.
- Multilateration [Electronic resource]. – Access mode: http://adsbradar.ru/crosstags/multilateration.
- NEO by ERA – COMPOSITE MULTILATERATION AND ADS‐B SURVEILLANCE [Electronic resource]. – Access mode: http://era.aero/products/neo-by-era/.
- Surveillance. Multilateration. [Electronic resource]. – Access mode: http://www.multilateration.com/surveillance/multilateration.html.
- Широкое внедрение мультилатерации. [Electronic resource]. – Access mode: http://orfei-travel.ru/article/powerful-surveillance-solutions.html.