
Зміст
- Введення
- 1. Актуальність теми
- 2. Мета і завдання дослідження
- 3. Огляд досліджень і розробок
- 3.1 Історія розвитку динаміки машин
- 3.2 Динаміка підйому в наші дні
- 4. Математичне моделювання динамічних процесів в одноконцевой підйомної машині з канатами великої довжини
- Висновки
- Перелік посилань
Введення
Видобуток природної мінеральної сировини створює матеріальну базу промислового виробництва, задовольняючи потреби суспільства в металах, паливі, будівельних та хімічних матеріалах. Значна частина корисних копалин видобувається на підприємствах з підземними гірничими роботами, що передбачає широке застосування шахтних підйомних установок для транспортування гірничої маси на поверхню.
Підйомні установки є одним з основних елементів транспорту на гірничих підприємствах. Надійність і висока продуктивність шахтного підйому багато в чому визначає ефективну роботу підприємства в цілому.
Перша велика вітчизняна підйомна машина була побудована в 1935 р. В даний час найбільш перспективними конструкціями є багатоканатні підйомні машини зі шківами тертя. Проблема підйому великих вантажів із значної глибини успішно вирішується застосуванням багатоканатні підйому. Шахтні підйомні установки, будучи найбільшими транспортними пристроями, мають специфічними, притаманними тільки їм, особливостями: величезною масою підйомної системи в цілому, переміщуваної в умовах несталого режиму руху зі значними прискореннями; значною масою підйомних канатів. Ці фактори перетворюють негативний вплив маси та інерції складових частин підйомної системи у велику проблему, оскільки значна маса кінцевого вантажу призводить до збільшення розмірів електромеханічної частини підйому, а неврівноваженість і інерція рухомих мас погіршує його енергетичні показники.
Великі маси шахтної машини, що рухаються з великими швидкостями, викликають складні динамічні процеси при пусках і гальмуваннях. Динамічні процеси формують надмірні навантаження, прогресуючі втомні явища окремих елементів конструкції, які призводять до аварійних ситуацій і до катастроф.
Для збільшення надійності, безпеки і довговічності машин проектування і виготовлення їх повинно здійснюватися з урахуванням впливу динамічних зусиль. Теоретичним фундаментом динамічних розрахунків є теорія механічних коливань. Знання законів коливальних процесів дозволяють спроектувати раціональні конструкції машин.
1. Актуальність теми
Питанням вдосконалення підйомних установок і розробки теорії рудничного підйому приділялася першочергова увага протягом всієї історії розвитку видобутку корисних копалин підземним способом. Однак, незважаючи на довгу і багату історію розвитку теми, практика проектування і експлуатації підйомних установок показує, що технічні можливості обраного обладнання часто залишаються недовикористаними, а розміри і вага обладнання завищеними.
Тому актуальною залишається завдання вдосконалення методів розрахунку і проектування динамічних режимів шахтних підйомних установок з метою забезпечення раціональних технічних характеристик.
Побудова математичних моделей роботи підйомної установки дозволить в подальшому більш детально вивчити роботу її окремих вузлів для вибору їх оптимальних характеристик. Що в свою чергу дозволить підвищити безпеку підйомної установки, а це особливо важливо при розгляді пасажирських установок – оптимізувати швидкісні характеристики ШПУ, а також вивчити знос обладнання від динамічних зусиль для подальшого усунення наявних проблем.
2. Мета і завдання дослідження
Метою даної роботи є математичне моделювання динамічних процесів одноконцевой і двухконцевой підйомних машин з канатами великої довжини.
Основні задачі моделювання:
- Висновок рівнянь руху для двох типів машин.
- Визначення раціонального числа пружних мас каната.
- Моделювання робочого режиму підйомної машини.
3. Огляд досліджень і розробок
Промислове виробництво і технічний прогрес немислимі без такої науки, як механіка. Одним з найважливіших розділів механіки є динаміка.
3.1 Історія розвитку динаміки машин
Основоположником динаміки машин можна вважати петербурзького академіка Е. Л. Ейлера (1707–1783). У своїх роботах Ейлер вперше виділив сили опору, подолані машиною в русі – він розділив їх на сили інерції і сили тертя [1]. Виведена ним формула, що отримала назву формули Ейлера, донині широко використовується для дослідження процесів тертя канатів по футеровці барабана багатоканатних підйомних машин.
Представник французької школи механіків Ж. Даламбер (1717–1783) спробував дати загальну методику розв’язання задач динаміки [2]. У своїх роботах по аналітичній механіці Ж. Лагранж (1736–1813) розвинув принцип Даламбера і розробив загальну методику розв’язання задач динаміки і статики аналітичним шляхом [2].
У ході історії розвиток техніки представляло перед вченими все більш нові та цікаві завдання. Зокрема, задачі динаміки механічних систем з розподіленою масою.
Російський учений А. М. Ляпунов (1857–1918) вперше досліджував проблему стійкості механічних систем з кінцевим числом ступенів свободи [3]. А. Н. Крилов (1863–1945), досліджуючи коливання поршня індикатора парової машини, вирішив задачу коливання маси вантажу, прикріпленого до кінця стрижня [3]. Вирішення подібних завдань використовується при дослідженні в’язкопружних систем з розподіленими параметрами, представниками яких є шахтні підйомні установки.
Питаннями дослідження і зменшення динамічних навантажень в канатах шахтних підйомників в ХХ столітті займалися такі вчені, як А. І. Динник, С. П. Тимошенко, М. М. Федоров, Ф. В. Флоринський, Г. Н. Савін, А. Н. Голубенцев, Л. В. Колосов та ін.
Для вивчення і визначення динамічних навантажень в підйомниках найчастіше їх розглядали як багатомасових механічну систему з пружними зв’язками.
Основоположними дослідженнями динаміки підйомного каната є роботи академіка А. Н. Динника (1876–1950) [4]. Створена акад. А. Н. Динником лабораторія механічних випробувань матеріалів стала в Україні центром випробування сталевих канатів та іншого гірничого обладнання. А. Н. Динник створив наукові школи в галузі теорії та розрахунку підйомних канатів, стійкості форм і пружної рівноваги, вчення про тиск гірських порід. Розглядаючи канат як гнучку нитку, А. Н. Динник для вивчення поздовжніх коливань канатів з кінцевим вантажем вперше розглянув канат як континуальну пружну систему [5–7]. Коефіцієнти стійкості, обчислені їм, увійшли в довідкову літературу. Розглянувши в першому наближенні гірську породу як пружну ізотропне середовище і застосувавши методи теорії пружності, А. Н. Динник визначив закон розподілу і величину напружень в гірських виробках.
Всесвітнє визнання отримав академік С. П. Тимошенко (1878–1972) [8–10]. Він показав, що для невагомого каната, один кінець якого затиснений (нерухомий), а на іншому висить тягар, частота коливань вантажу буде практично однакова системі вагомий канат – вантаж
, якщо розглядати канат як невагомий стрижень і до вантажу додати одну третину маси каната. Цей результат адекватний додатку однієї третини маси каната від вузла коливань, тобто від точки, амплітуда коливань якої дорівнює нулю.
Академік М. М. Федоров (1867–1945) дослідженнями в області шахтного підйому створив нову наукову дисципліну, яка отримала назву – гірнича механіка
. Він вивів основне динамічне рівняння рудничних підйомних установок з постійним радіусом навивки; запропонував гармонійний підйом, що забезпечив повне динамічне зрівноважування підйомних установок з важким хвостовим канатом [11].
Ф. В. Флоринський (1905–1975) узагальнив теоретичні дослідження багатьох вчених і запропонував нові методи розрахунку вагомого підйомного каната у вигляді простих формул і таблиць. Створена Ф. В. Флоринським динамічна теорія розрахунку шахтних підйомних канатів до теперішнього часу є науковою основою подальших робіт в цій галузі. Їм розглянуті задачі динаміки каната як вагомого пружно & ndash; вузького стержня з вантажем на кінці за умови, коли верхній кінець каната має прискорення [12].
Ряд робіт Г. Н. Савіна (1907–1975) були присвячені дослідженню задач динаміки нитки (каната) змінної довжини. Вони становили основу запропонованої ним новій теорії розрахунку шахтних підйомних канатів, у яких враховувався динамічний режим їх роботи [13, 14] .
Голубенцев А. Н. (1916–1971) розробив теорію перехідних процесів в машинах з пружними ланками і отримав нові суттєві результати з оптимізації процесів в просторі параметрів машин. Їм були викладені основи динаміки перехідних процесів в лініях передач важких машин з урахуванням пружності їх ланок. Були детально розглянуті коливальні явища в шахтних підйомних машинах, а так само дано поняття про синтез машин з метою отримання найбільш сприятливого перехідного процесу на основі застосування найкращого наближення Чебишева. Для розрахунків перехідних процесів Голубенцев А. Н. застосовував метод головних координат, що дозволяло отримувати замкнуті рішення у разі складних багатомасових систем, користуючись найпростішими класичними методами рішення диференціальних рівнянь [15].
Л. В. Колосов (1936–2000) був продовжувачем наукової школи теорії та розрахунку шахтних підйомних канатів, сформованої А. Н. Динник та Ф. В. Флоринським. Л. В. Колосов досліджував динаміку сталевих канатів в умовах їх взаємодії з підйомною машиною. Під керівництвом Л. В. Колосова було створено новий науковий напрям з розрахунку і конструюванню плоских гумотросових канатів, розроблена теорія розрахунку цих канатів, їх конструкції, технічна документація з виготовлення та експлуатації [16, 17].
3.2 Динаміка підйому в наші дні
Сучасний стан питання про динамічних навантаженнях в підйомі машинах описано в роботах таких видатних вчених, як Р. Л. Міщенко, В. І. Дворніков, А. Г. Степанов та ін.
Професор В. І. Дворніков у своїх роботах висвітлював основи теорії та динаміки шахтного підйому. Їм були розроблені методи ефективної експлуатації, діагностики і ремонту підйомних машин, редукторів, гальмівних пристроїв, підйомних посудин, приводів постійного і змінного струму та іншого обладнання, узагальнено досвід підвищення надійності в процесі експлуатації.
Однак більшу значимість для даної роботи мають праці В. І. Дворнікова безпосередньо по динамічної теорії розрахунку шахтних підйомних канатів [18–20].
У своїх роботах автор представляє базисну модель двухконцевой шахтної підйомної установки у вертикальному стволі у вигляді трехмассовой системи зосереджених тіл, сполучених між собою величезними канатами, як це зображено на рис. 1 [20].

Рисунок 1 – Схематизація одноконцевой підйомної установки
Визначення динамічних змінних і динамічних силових факторів такої базисної моделі зводиться автором до алгоритму:
- Знаходиться необхідна кількість власних частот.
- Кожному знайденому значенню частоти приводяться у відповідність трьохкомпонентна матриць – стовпець форм, попередньо обчисливши коефіцієнти динамічних жорсткостей.
- Iнтегруються рівняння координатних функцій паралельно з обчисленнями ермітових форм.
- Використовуються розкладання по власних форм загального рішення рівняння для обчислень переміщень швидкостей і прискорень вантажів і барабана машини і визначення динамічних зусиль у канатах.
Підйомний канат представлений Дворнікова В. І. у вигляді пружної невагомою нитки. Маса каната наведена до зосередженої масі судини. Справедливість цього припущення залежить від довжини уравновешивающего каната. При малій довжині уравновешивающего каната його розподілена маса чинить несуттєвий вплив на динамічні процеси. Виконані дослідження для існуючих неврівноважених підйомних установок, при прийнятих припущеннях, дають значення частотних і амплітудних величин, які можна порівняти з вирішенням цього завдання в приватних похідних. У збитків більш суворим уявленням прийняття цього допущення істотно зменшує трудомісткість рішення. Однак при великих довжинах каната з’являються великі похибки у визначенні динамічних зусиль в канатах. Для того, щоб уникнути великих похибок, розподілену масу цього каната рекомендується розбити на кілька рівних мас, з’єднаних невагомими в’язкопружними зв’язками.
Динамікою підйомних машин з подібним урахуванням розподіленої маси пружних елементів займався доктор технічних наук, професор Степанов А. Г. [21–24]. У своїх роботах він пропонує еквівалентну схему, в якій головні і врівноважуючі канати розбиті на деяку кількість частин, що представляють собою маси, з’єднані в’язкопружними зв’язками (рис. 2). Однак у розглянутих роботах відсутні рекомендації з вибору кількості мас, на які слід розбивати канат заданої довжини.

Рисунок 2 – Еквівалентна схема гілки канатів врівноваженого підйому
Однак такий спосіб визначення динамічних навантажень в канаті видається складним з тієї причини, що для моделювання динамічних процесів необхідна досить потужна обчислювальна техніка.
Враховуючи теоретичні дослідження вище наведених авторів, автор даної роботи пропонує замінити канат великої довжини деякою кількістю розподілених пружних дисипативних мас.
4. Математичне моделювання динамічних процесів в одноконцевой підйомної машині з канатами великої довжини
Підйом вантажу у вертикальному стволі відбуватиметься згідно зі схемою, показаної на рис. 3.

Рисунок 3 – Підйом вантажу за допомогою одноконцевой підйомної машини
(анімація: 8 кадрів, 5 циклів повторення, 142 кілобайт)
Така машина складається з барабана машини з приведеними до нього моментами інерції обертових частин редуктора і ротора електродвигуна з кінетичним моментом інерції Jб, направляючого шківа з моментом інерції Jш, похилої струни каната lcтр, яка вважається незмінною в часі, і схильної частини каната lотв, на якій закріплена маса кінцевого вантажу mn (рис. 4).

Рисунок 4 – Схематична модель одноконцевой підйомної машини
Схильний канат підйомної машини розбитий на деяку кількість розподілених мас mk з координатами yi, пов’язаних між собою пружними зв’язками ek. Кінцевий вантаж mn має переміщення yn по вертикалі, що відраховується від деякого вихідного положення вантажу.
Для деякого спрощення виведення рівнянь руху приймемо такі припущення:
- Вважаємо функції, залежні від часу, повільно змінюються. Концепція повільно змінюються функцій дозволяє розглядати систему як адіабатичну, тобто як систему з нібито постійними коефіцієнтами, а потім в отриманих рішеннях вже врахувати їх фактичну повільну залежність від часу. Внаслідок цього приймемо, що коефіцієнт податливості першого елемента е1 залишається незмінною.
- Так як моделювання буде проходити протягом порівняно невеликого ділянки часу, то можна прийняти, що за цей час кількість мас каната не поміняється.
Для виведення рівнянь динаміки машини використовуємо рівняння Лагранжа ІІ роду:
 .
.
Так як сила опору ділянок каната пропорційна швидкості руху, то на кожну ділянку додатково будуть діяти дисипативні сили. З урахуванням функції Релея рівняння Лагранжа ІІ роду приймуть вигляд:
 .
.
Кінетична енергія такої системи буде складатися з суми кінетичних енергій трьох розглянутих зосереджених мас, струни і схилу і прийме вигляд:
 .
.
Потенційна енергія буде складатися з потенційної енергії сил пружної деформації струни і схилу при прийнятих припущеннях і гравітаційної частини з урахуванням, що струна нахилена до горизонту під кутом:
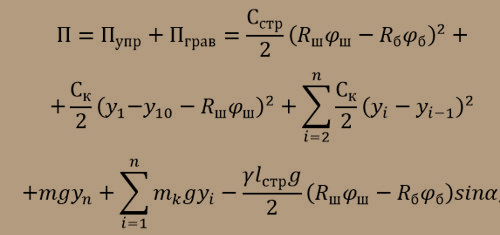 .
.
де: Сстр – коефіцієнт жорсткості струни, Ск – коефіцієнт жорсткості i–ої частини схилу, y1 – положення першої пружно-дисипативної маси схилу, y10 – початкове положення першої маси.
Функція Лагранжа являє собою різницю кінетичної і потенційної енергій системи і для даного випадку буде мати вигляд:
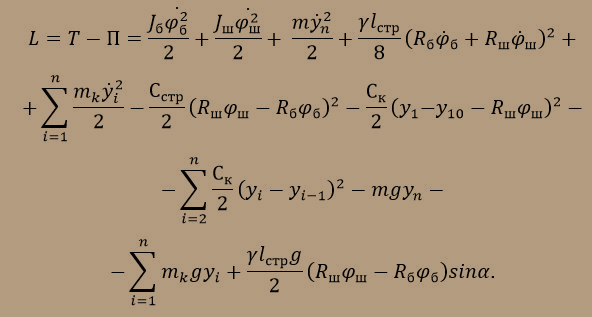 .
.
Визначимо в якості узагальнених координат елементів даної системи змінні
тоді відповідно в якості узагальнених швидкостей
Узагальнені непотенційні сили Q1, Q2, Qi (i=1...n) для даної системи приймемо наступними: Q1=Mдв(t), Q2=0, Qi=0 (i=1...n), де Mдв(t) – приведений до осі барабана момент, що розвивається двигуном, і цю змінну будемо вважати відомою функцією від часу.
Узагальнені сили Q2, Qi (i=1...n) прийняті рівними нулю, оскільки передбачається, що шків і кінцевий вантаж не схильні до дії інших зовнішніх сил, окрім вже врахованих.
Провівши необхідні обчислення похідних від функції Лагранжа, в результаті отримаємо шукані рівняння руху:
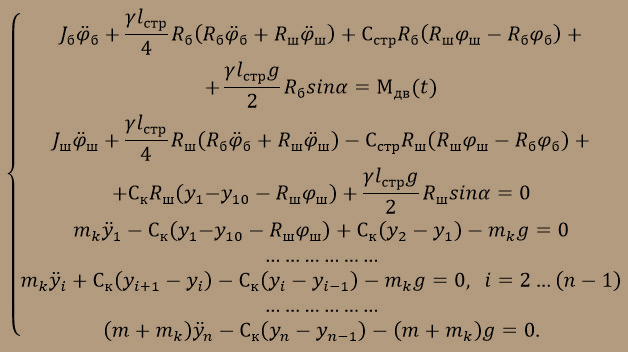 .
.
Оскільки пружні і дисипативні елементи зв’язків розташовуються паралельно, то при обліку дисипативних сил, що не записуючи вираз для функції Релея, легко отримати підсумкову математичну модель розглянутої динамічної системи шляхом додавання дисипативних складових:
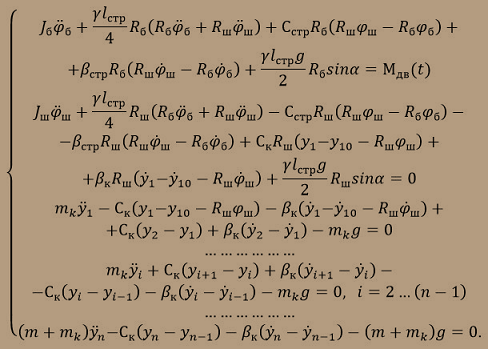 .
.
Висновки
Отримані рівняння руху дозволяють простежити пружні і гравітаційні впливу, що діють на барабан, шків, вантаж, а також на кожен відрізок каната під час пуску машини, її роботи і гальмування. Таку методику визначення динамічних зусиль у канаті можна застосовувати для будь-яких одноконцевих підйомних машин.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2015 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Euler L. De machinis in genere. Novi Commentarii Acad. Sci. Imp. Petrop., 3, 1753. – P. 254-285.
- Стройк Д. Я. Краткий очерк истории математики / Д. Я. Стройк. – М. : Наука, 1984. – 283 с.
- Осецкий В. М. Техническая механика / В. М. Осецкий – М. : Госгортехиздат, 1962. – 471 с.
- Динник А. Н. Динамические напряжения в подъемном канате при внезапной остановке верхнего конца / А. Н. Динник. – Южный инженер, 1917. – № 3-4.
- Динник А. Н. Кручение. Теория и приложение / А. Н. Динник. – М., 1938.
- Динник, А. Н. Устойчивость упругих систем : учеб. пособие для ун-тов / акад. А. Н. Динник, проф. Днепропетр. металлург. ин-та. – М. : ОНТИ НКТП СССР, Гл. ред. общетехн. лит. и номографии, 1935. – 183 с.
- Кожухов А. А., Очинский В. В. Академик А. Н. Динник (к 130-летию со дня рождения) // Исследования по истории физики и механики 2006. – М.: Наука, 2007. – С. 239-248.
- Тимошенко С. П. Колебания в инженерном деле / С. П. Тимошенко, Д. Х. Янг, У. Уивер ; пер. с англ. Л. Г. Корнейчука. – М. : Машиностроение, 1985. – 472 с.
- Тимошенко С. П. О вынужденных колебаниях призматических стержней / С. П. Тимошенко. – Киев: тип. С. В. Кульженко, 1909. – 50 с.
- Тимошенко С. П. Статистические и динамические проблемы теории упругости / С. П. Тимошенко. – Киев: Наукова думка, 1975. – 564 с.
- Федоров М. М. Методология динамической теории расчета подъемного каната вертикальных шахт / М. М. Федоров // Записки института горной механики. АН УССР. – 1936. – № 1.
- Флоринский Ф. В. Динамика шахтного подъемного каната / Федор Валентинович Флоринский. – М. : Углетехиздат, 1955. – 238 с.
- Савин Г. Н. Динамическая теория расчета шахтных подъемных канатов / Г. Н. Савин. – К. : Из-во АН УССР, 1949. – 238 с.
- Савин Г. Н. Динамика нити переменной длины / Г. Н. Савин, О. А. Горошко. – К. : Из-во АН УССР, 1949. – 332 с.
- А. Н. Голубенцев, Динамика переходных процессов в машинах со многими массами / А. Н. Голубенцев. – Москва: ГНТИ, 1959.
- Колосов Л. В., Потураев В. Н., Червоненко А. Г., Безпалько В. В., Завозин Л. Ф. Вертикальный транспорт на горных предприятиях / Л. В. Колосов, В. Н. Потураев , А. Г. Червоненко, В. В. Безпалько, Л. Ф. Завозин. – М.: Недра, 1975. – 350с.
- Гаркуша Н. Г., Колосов Л. В., Обухов А. Н. и др. Подвесные устройства шахтных подъемных сосудов. Под ред. Н. Г. Гаркуши / Н. Г. Гаркуша, Л. В. Колосов, А. Н. Обухов. – М.: Недра, 1980. – 105 с.
- Дворников В. И. Теоретические основы динамики шахтного подъемного комплекса / В. И. Дворников, Е. Р. Къерцелин. – София, МОНТ, 1997. – 363 с.
- Дворников В. И., Къерцелин Е. Р., Трибухин В. А., Савенко Э. С. Динамические жесткости канатов шахтных подъемных установок / В. И. Дворников, Е. Р. Къерцелин, В. А. Трибухин, Э. С. Савенко // Стальные канаты. – Одесса, 2003. – Вып. 3.
- Шахтный подъем: Научно–производственное издание / В. Р. Бежок, В. И. Дворников, И. Г. Манец, В. А. Пристром; общ. ред. Б. А. Грядущий, В. А. Корсун. – Донецк : ООО «Юго-Восток Лтд», 2007. – 624 с.
- Степанов А. Г. Динамика шахтных подъёмных установок / Анатолий Григорьевич Степанов. – Пермь : УрО РАН, 1994. – 263 с.
- Степанов А. Г. Динамика машин / А. Г. Степанов. – Екатеринбург: Российская академия наук, 1999. – 392 с.
- Степанов А. Г., Корняков М. В. Динамика машин : монография. 2–е изд., испр. и доп. / А. Г. Степанов, М. В. Корняков. – Иркутск : Изд-во ИрГТУ, 2014. – 412 с.
- Степанов А. Г. Динамические процессы при скольжении канатов по футеровке барабана многоканатной подъемной установки / А. Г. Степанов // Горное оборудование и электромеханика. № 6, 2010. – C. 24-35.