
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность ветроэнергетики
- 2. Цели и задачи
- 3. Анализ мощности и крутящего момента СДПМ
- 4. Ветротурбина
- 5. Исследуемая система
- 6. Моделирование системы
- Выводы
- Список источников
Введение
Объектом исследования в данной статье является ветроэнергетическая установка на базе синхронного генератора с постоянным магнитом и двухзвенного преобразователя частоты.
В настоящее время ветроэнергетические установки (ВЭУ) получают всё большее распространение, это связано с удорожанием топлива для тепловых электростанций. ВЭУ применяются в автономных системах электроснабжения совместно с классическими дизельными или бензиновыми генераторами. Это позволяет обеспечить бесперебойное питание при низком расходе топлива.
Общие типы генераторов переменного тока, которые используются в системах современных ветротурбин: асинхронный генератор с короткозамкнутым ротором; асинхронный генератор с фазным ротором; машина двойного питания; синхронный генератор магнитоэлектрическим возбуждением; и синхронный генератор с постоянными магнитами. Тем не менее, в данной работе с переменной скоростью непосредственно использован синхронный генератор с постоянными магнитами (СГПМ), поскольку он обеспечивает более высокую производительность за счет более высокой эффективности и меньшего обслуживания, так как у него на роторе находятся магниты и не имеется щеток.
1. Актуальность ветроэнергетики
В настоящее время во всем мире наблюдается повышенный интерес к использованию в различных отраслях экономики нетрадиционных возобновляемых источников энергии. Ведется бурная дискуссия о выборе путей развития энергетики. Это связано, прежде всего, с растущей необходимостью охраны окружающей среды и истощением ископаемых природных ресурсов [1].
Крупные ветряные электростанции включаются в общую сеть, более мелкие используются для снабжения электричеством удалённых районов. В отличие от ископаемого топлива, энергия ветра практически неисчерпаема, повсеместно доступна и более экологична. Разработка проектов, связанных с возобновляемыми источниками электроэнергии, в частности ветроэнергетикой, является перспективным направлением в настоящее время.
Ветроэнергетика является нерегулируемым источником энергии. Выработка ветроэнергии зависит от силы ветра, фактора, отличающегося большим непостоянством. Соответственно, выдача электроэнергии с ветрогенератора в энергосистему отличается большой неравномерностью, как в суточном, так и в недельном, месячном, годовом и многолетнем разрезе [2].
Современная ветроэнергетика имеет ряд проблем, которые негативным образом влияют на повышение эффективности энергосбережения [3]. Наиболее актуальные из них следующие:
- обеспечение продолжительного функционирования ветроэлектрических агрегатов;
- обеспечение эффективного использования энергии ветра;
- стабилизация частоты электроэнергии, которую вырабатывают ветроустановки.
Также с ростом доли возобновляемых источников энергии, приобретает важное место качество энергии, которую они поставляют в сеть. Эта проблема особенно актуальна для ветровых генераторов, поскольку скорость ветрового потока является очень нестабильной величиной, а, следовательно, без качественного регулирования нестабильной оказывается и выходная мощность ветрогенератора. Труднореализуемой задачей является точная синхронизация ВЭУ с сетью, учитывая переменный характер ветра и большие массы ветроколеса.
2. Цели и задачи
Основной задачей является получение максимально возможной мощности от ветроэлектростанции.
От системы управления требуется выполнение различных по своему характеру воздействий – от непрерывного управления с быстрой реакцией до дискретных аварийных защитных действий и процессов со строго последовательными операциями. Поскольку различные управляющие функции в разной степени влияют на обеспечение безопасности и надежности работы ВЭУ, система не может быть оптимальной во всех отношениях [2].
Основные технические требования, предъявляемые к системе управления ВЭУ при параллельной работе с сетью, представлены ниже:
- работоспособность при заданных эксплуатационных условиях;
- автоматический пуск и последующая синхронизация;
- регулирование мощности и частоты вращения ротора;
- контроль собственных подсистем и оборудования ВЭУ, периодический самоконтроль;
- формирование и выдача команд для управления элементными системами ВЭУ.
Задачами системы управления является:
- поддержание частоты (активная мощность);
- поддержание напряжения (реактивная мощность);
- показатели качества электрической энергии;
- защита и автоматика ветроэлектростанции (ВЭС).
При рассмотрении вышеперечисленных требований необходимо учитывать, что ветер характеризуется непостоянством величины и направления, поэтому пульсации мощности единичной ВЭУ должны сглаживаться большим количеством агрегатов.
Цель работы – изучение основ ветроэнергетики, методов управление выходной мощностью ветротурбины, создание реальной рабочей модели системы и ее моделирование. Основной задачей данной работы является разработка имитационной модели автономной ветроэнергетической системы СГПМ с использованием пакета MATLAB/Simulink.
В данной работе был использован синхронный генератор с постоянными магнитами (СГПМ), который основан на работе с переменной скоростью. Так как скорость ветряной турбины является переменной, генератор управляется с помощью электронных устройств питания. Инвертор используется в роли выпрямителя для выходного напряжение СГПМ, далее накопленная на конденсаторе энергия с помощью активного выпрямителя, который выступает в роли инвертора, передается в сеть. Ветроэнергоустановка (ВЭУ) управляется так, чтобы извлечь максимальную выходную мощность ветра, при этом не превышая граничных значений по скорости вращения и моменту.
3. Анализ мощности и крутящего момента СДПМ
Для любого СДПМ, электрическая потребляемая мощность может быть выражена в abc-системе координат следующим образом [4]:
| Pabc = vas ias + vbs ibs + vcs ics | (3.1) |
или в dq-системе следующим образом:
 |
(3.2) |
Как часть входной мощности в двигательном режиме активная мощность – это энергия, которая преобразуется из механической энергию с помощью машины, может быть выражена следующим образом:
 , , |
(3.3) |
где
| ed = - ωe Lq iqs = - ωe ψq | (3.4) |
и
| eq = - ωe Ld ids + ωe ψr = - ωe ψd | (3.5) |
Здесь ed и eq – противо-ЭДС в dq-системе координат, ψd и ψq – dq-потокосцепления. Подставляя выражения (3.4) и (3.5) в (3.3), активная мощность может быть повторно выражена следующим образом:
Следовательно, электромагнитный момент, развиваемый в СДПМ можно вывести следующим образом:
или

где р – число полюсов в машине.
Блок синхронной машины с постоянными магнитами работает в генераторном режиме. Режим работы диктуется знаком механического вращающего момента (отрицательным для генераторного режима). Синусоидальной модель предполагает, что поток устанавливается постоянных магнитов статора представляет собой синусоиду, то есть ЭДС являются синусоидальной.
Блок реализует следующие уравнения.
Эти уравнения выражаются в dq-системе отсчета.
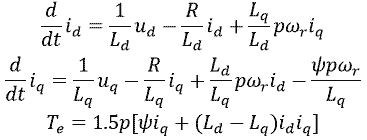
где
Ld, Lq – d- и q-составляющие индуктивности статора;
R – сопротивление обмоток статора;
id, iq – d- и q-составляющие токов статора;
ud, uq – d- и q-составляющие напряжений статора;
ωr – угловая скорость ротора;
ψ – амплитуда потока, индуцированного постоянными магнитами ротора в фазах статора;
р – число пар полюсов;
Te – электромагнитный момент.
Механическая система.
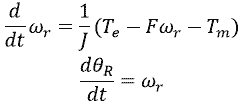
где
J – комбинированный инерция ротора и нагрузки;
F – комбинированный вязкое трение ротора и нагрузки;
θR – угловое положение ротора;
Tm – механический крутящий момент на валу.
На вход Tm (механический крутящий момент на валу машины) приходит отрицательный крутящий момент, что указывает на режим генератора. Скорость машины определяется ее инерцией J и разностью между приложенным механическим моментом Tm и внутренним электромагнитным моментом Te.
4. Ветротурбина
Ветровую энергию можно рассматривать как кинетическую энергию большого количества частиц воздуха с общей массой m, со скоростью движения ветра Vw. Предполагая, что все частицы воздуха движутся с той же скоростью и направлением, прежде чем воздействовать на лопасти ветряной турбины, накопленный потенциал кинетической энергии ветра может быть выражен следующей формулой:
 , , |
(4.1) |
где Е – кинетическая энергия движущихся частиц воздуха, m – общая масса частиц воздуха, в то время Vw – скорость ветра. Поскольку частицы воздуха движутся со скоростью Vw, общая масса частиц – m, в течение периода времени t, будет записана следующей формулой:
 , , |
(4.2) |
где ρ – плотность воздуха, A – ометаемая площадь ветровой турбины и r – радиус ветрового колеса. Подставляя (4.2) в (4.1), кинетическая энергия частиц воздуха может быть выражено следующим образом:
 |
(4.3) |
Из выражения (4.3), фактическая энергия ветра в любой момент времени может быть представлена в виде:
 , , |
(4.4) |
где Pwind – потенциально доступная мощность ветра. Из выражения (4.4), мы можем наблюдать, что энергия ветра пропорциональна кубу скорости ветра, а это означает, что небольшое увеличение скорости ветра приведет к значительному увеличению энергии ветра. Кроме того, мощность может быть увеличена за счет увеличения радиуса ветрового колеса, так как мощность пропорциональна квадрату этого радиуса ротора.
Тем не менее, мощность, показанная в выражении (4.4) может стоять только для максимальной потенциальной мощности, которая доступна, когда ветер со скоростью Vw, проходит через область ветрового колеса с радиусом r. На самом деле, только часть этой потенциально доступной мощности может быть захвачена ветротурбиной. В 1919 году немецкий ученый Альберт Бец попытался выразить действие частиц воздуха (ветра), проходящих через ветротурбину [5]. По идее Бетца, после воздействия на лопасти турбины, скорость ветра уменьшается от VW к VW2, что означает, когда ветер проходит через лопасти турбины, некоторая кинетическая энергия все еще остается в частицах ветра. Отношения между энергией, захваченной ветротурбиной и потенциально максимальной энергией ветра может быть выражена следующим образом:
 , , |
(4.5) |
где Pturbine является механическая мощность, захваченная ветротурбиной, и Cp – коэффициент мощности ветровой турбины, который может быть выражен следующим образом [6]:
 , , |
(4.6) |
где
 |
(4.7) |
и
 |
(4.8) |
где β – угол поворота лопасти, а λ представляет собой отношение скорости наконечника лопасти турбины к скорости ветра, а ωm – угловая скорость генератора ветротурбины. Значения коэффициентов (с1 ∼ с6), зависят от типа ветротурбины и в данном исследовании c1 = 0,5176; c2 = 116; c3 = 0,4; c4 = 5; c5 = 21 и c6 = 0,0068.
Угол β указывает на то, как же скорость ветра воздействует на лопасти ветровых турбин [7]. Угол поворота лопасти – это угол между ориентацией лопасти и вектора скорости ветра. Когда β = 0, на лопасть полностью влияет скорость ветра, а ветровая турбина будет фиксировать максимальную мощность ветра. Угол лопасти обычно фиксируется нулевым, когда скорость ветра ниже номинальной скорости ветросистемы, чтобы обеспечить высокую эффективность захвата энергии. Когда скорость ветра становится больше номинального значения, энергия, захватываемая системой будет превышать номинальную мощность, если угол β останется нулевым. Из-за этого генератор и силовые устройства будут работать выше номинальной мощности, что является вредным для системы, особенно, если этот режим будет продолжаться в течение длительного времени. На основе этого, система управления углом поворота лопасти в зависимости от различных условий ветра необходима для ветровой турбины [8]. Соответственно, мощность, захваченную ветротурбиной, можно переписать следующим образом:
 |
(4.9) |
5. Исследуемая система
Функциональная схема моделируемой ветроэнергосистемы представлена на рисунке 1.
Рисунок 1 – Функциональная схема ВЭУ
(анимация: 6 кадров, 5 циклов повторения, 176 килобайт)
Синхронный генератор с постоянными магнитами (СГПМ) питается от двухзвенного преобразователя частоты и со стороны ветроколеса на него постоянно подается отрицательный момент. В системе присутствуют следующие контуры регулирования: два внешних (контур регулирования скорости и контур регулирования потока) два внутренних (контуры регулирования тока по осям d и q).
На турбину приходит ветер со скоростью Vw, который передает часть кинетической энергии, взаимодействуя с лопастями турбины. Турбина соединена валом, на котором возникает момент вращения, с синхронным генератором с постоянными магнитами (СГПМ). С генератора снимаются следующие механические характеристики: угол поворота θR, рад и скорость вращения вала ω, рад/с. В генераторе механическая энергия переходит в электрическую и подается на автономный инвертор напряжения (АИН), который работает в роли выпрямителя. На данном этапе получаем напряжения uabc и токи статора iabc, значение которых идет на систему управления инвертором и на вычисление заданной скорости вращения ωзад.
С АИН электрическая энергия передается в звено постоянного тока, где с помощью конденсатора большой мощности накапливается и переходит на активный выпрямитель (АВ), который работает в обратном режиме как инвертор. Со звена постоянного тока снимается напряжение Ud и передается в систему управления активного выпрямителя (СУ АВ).
В схеме используется двухзвенный преобразователь частоты (ПЧ), выступающий в качестве регулируемого источника энергии, чтобы формировать выходящие в сеть напряжения (токи) с заданными значениями основной (первой) гармоники. Для формирования и регулирования выходного напряжения ПЧ используется принцип широтно-импульсной модуляции (ШИМ). Схемы АИН и АВ выполнены из полностью управляемых полупроводниковых силовых ключей.
Источник постоянного напряжения Ud регулируемый и поддерживает двухсторонний обмен энергией с сетью. АВ позволяет обеспечить полноценный двухсторонний обмен энергией с сетью, обеспечивая при этом практически синусоидальные входные токи ПЧ (токи сети).
Для регулирования в первой зоне, дабы извлекать при любых скоростях ветра максимально возможную мощность эксперементальным путем была составлена следующая таблица.
| Vwind, м/с | ω, о. е. | Pел, о. е. |
|---|---|---|
| 1 | 0,06 | 2,2е-04 |
| 2 | 0,15 | 0,0019 |
| 3 | 0,21 | 0,0065 |
| 4 | 0,3 | 0,0152 |
| 5 | 0,36 | 0,0299 |
| 6 | 0,42 | 0,0517 |
| 7 | 0,51 | 0,082 |
| 8 | 0,57 | 0,1226 |
| 9 | 0,63 | 0,1743 |
| 10 | 0,72 | 0,2394 |
| 11 | 0,78 | 0,3186 |
| 12 | 0,87 | 0,4134 |
| 13 | 0,93 | 0,526 |
| 14 | 1 | 0,6568 |
Использовав данные точки, мы нашли аппроксимированную зависимость 3-го порядка ω = f (P), по которой будет задаваться скорость вращения для извлечения максимальной электрической мощности в первой зоне.
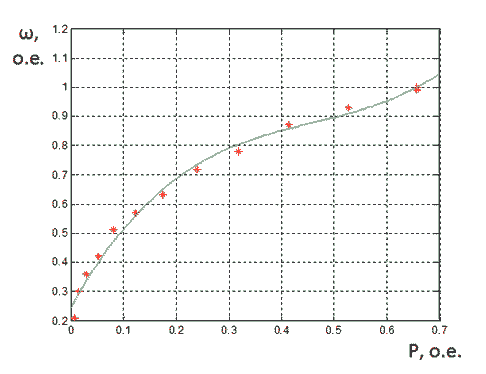
Рисунок 2 – Аппроксимация экспериментальных точек
ω (P) = 4,405x3 - 6,082x2 + 3,241x + 0,247
Регулирование во второй зоне осуществляется с помощью угла поворота лопастей β, управление которым реализовано с помощью пропорционально-интегрального регулятора. Когда скорость ветра выше номинальной, нужно пропускать излишнюю энергию. На ПИ-регулятор передается информация о текущей разнице между измеряемой электрической мощностью и максимальной мощность Pmax* = 0,657 в о. е. в обмотке генератора, при превышении Pmax* угол β увеличивается по определенному закону для поддержания максимальной мощности.
Контур регулирования тока выполнен с помощью релейных регуляторов тока. На РРТ через канал обратной связи поступают сигналы с датчиков тока, которые измеряют ток каждой фазы двигателя. Эти сигналы сравниваются с сигналами задания на ток, которые поступают из регуляторов скорости и потокосцепления через координатные преобразователи. Настройка контура регулирования тока заключается в выборе коридора для РРТ.
На вход регулятора скорости подается необходимое значение скорости. От сигнала задания через обратную связь вычитается сигнал скорости с генератора. Полученный сигнал поступает на регулятор скорости, который, как и РП, выполненный с ограничением координат.
Рассмотрим систему управления автономного инвертора напряжения.
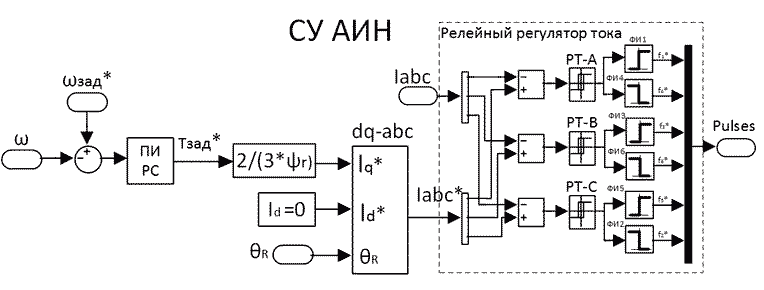
Рисунок 3 – Структурная схема системы управления автономного инвертора напряжения (СУ АИН)
На вход приходят следующие сигналы: угол поворота генератора θR и его скорость вращения ω, заданная скорость вращения ωзад*, токи на фазах статора Iabc.
Регулятор скорости основан на ПИ-регуляторе (блок ПИ РС), на вход которого приходит вычисленная ошибка между заданной и действующей скоростью вращения ω. Выходом регулятора являются крутящий момент, поскольку поток ротора в СГПМ постоянен и равен ψr, вычисляется значение тока Iq.
Блок dq-abc выполняет dq-преобразование составляющих вращающегося поля отсчета в abc-фазные сигналы управления переменного тока.
Релейный регулятор тока основан на сравнении сигналов управления, с имеющимися сигналами токов статора. Управляющие сигналы представляют
собой симметричную трехфазную систему токов, пропорциональных желаемым значениям соответствующих фазных токов генератора. Релейный регулятор
содержит узлы сравнения, регуляторы тока (РТ) и формирователи дискретных импульсов (ФИ). В функции последних входит формирование импульсов
управления Pulses
.
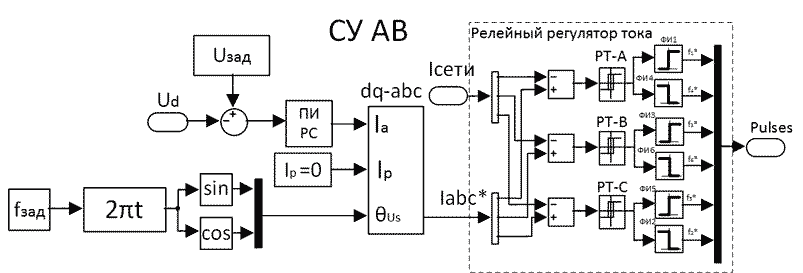
Рисунок 4 – Структурная схема системы управления активного выпрямителя (СУ АВ)
На вход системы приходят следующие сигналы: заданное напряжение Uзад, напряжение звена постоянного тока Ud, заданная частота fзад и токи сети Iсети.
Принцип системы управления АВ похож на СУ АИН с пропорционально-интегральным регулятором скорости (ПИ РС), блоком dq-abc, выполняющим dq-преобразование и релейным регулятором тока, но с некоторыми отличиями.
Использовав заданную частоту fзад, с помощью тригонометрических операций мы высчитываем требуемый угол поворота сети θUs.
На вход блока ПИ РС приходит ошибка между заданным напряжением Uзад и напряжением звена постоянного тока Ud. Выходом регулятора являются активная часть тока Iа, которая вместе с током Iр = 0 (поскольку поток ротора в СГПМ постоянен и равен ψr) приходит на блок преобразования dq-abc.
Блок dq-abc выполняет dq-преобразование составляющих вращающегося поля отсчета в abc-фазные сигналы управления переменного тока.
Релейный регулятор тока основан на сравнении сигналов управления, с имеющимися сигналами токов сети. Управляющие сигналы представляют собой
симметричную трехфазную систему токов, пропорциональных желаемым значениям соответствующих фазных токов сети. Релейный регулятор содержит узлы
сравнения, регуляторы тока (РТ) и формирователи дискретных импульсов (ФИ). В функции последних входит формирование импульсов
управления Pulses
управляемыми тиристорами.
6. Моделирование системы
Моделирование силовой части выполнено с помощью приложения POWERSYSTEM. В нее входят:
- АВН (активный выпрямитель напряжения), выполнен по трехфазной мостовой схеме на IGBT с обратными диодами;
- Автономный инвертор напряжения, выполнен по трехфазной мостовой схеме на IGBT с обратными диодами;
- в звене постоянного тока установлен конденсатор С = 20 000 мкФ, на входе со стороны трехфазного источника установлены три дросселя индуктивностью 2 мГн;
- Permanent Magnet Synchronous Machine (СДПМ) с параметрами схемы замещения.
Используется две системы управления (одна управляет АВ, другая – АИН) выполнены с помощью блоков SIMULINK:
- СУ АИН (регулятор напряжения в звене постоянного тока), пропорционально-интегрального типа, настраивается подобно регулятору скорости в двухкратно-интегрирующей системе скорости;
- координатный преобразователь, формирует синусоидальные сигналы задания тока сети, в функции активного Iа и реактивного Iр токов задания, синхронизирован с напряжением сети;
- СУ АВ (релейные регуляторы тока сети), формируют три
токовых трубки
по фазам токов сети (сравниваются заданные токи и токи обратной связи).
Результаты моделирования представлены на следующих рисунках. Здесь скорость ветра составляет 10 м/с, в период времени 0,5 с увеличиваем до 14 м/с, что является номинальной для ветротурбины, в 1 с – возростает до 22 м/с и наблюдаем за поведением системы.
Из графиков видно, что регулирование в первой зоне происходит до времени t = 1 c. После 1 с включается регулятор мощности, и мощность, скорость и момент удерживаются на номнальном уровне.
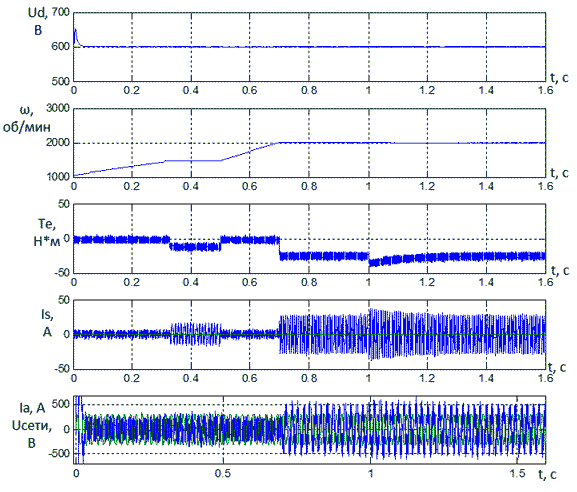
Рисунок 5 – Результаты моделирования, где Ud – напряжение в звене постоянного тока, ω – скорость вращения, Te – момент на валу генератора, Is – ток статора, Ia и Uсети – ток и напряжение сети
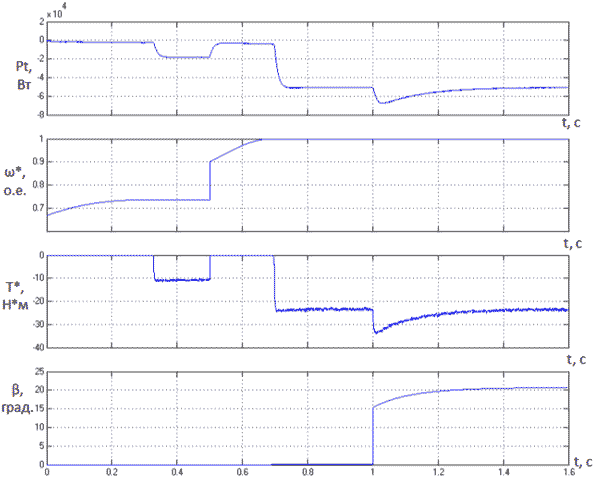
Рисунок 6 – Результаты моделирования, где Pt – выходная мощность турбины, ω* – заданная скорость, T* – заданный момент, β – угол поворота лопастей
Недостатком рассмотренной модели является отсутсвие влияния многомассовой системы на процессы, а также отсутствие алгоритма поиска максимальной мощности. Кроме того в работе рассматривается постоянная скорость ветра, что не соответсвтует действительности. Также в работе не рассматривается СГПМ с явнополюсным ротором, и двухзонное управление.
Выводы
В данной работе были изучены основы ветроэнергетики, показана ее актуальность на сегодняшний день, рассмотрены основные цели и задачи ветроэнергетической промышленности. Ветроэнергетика является перспективным направлением энергетики и инженерии в целом с точки зрения экономики и экологии, поскольку является дешевым видом энергии, использующий возобновляемый ресурс – ветер, и при этом не загрязняет окружающую среду.
Также в работе представлены основные понятия моделирования системы ветротурбина–СГПМ
, на которые использовались
для создания и моделирования собственной ветроэнергетической системы.
Представлена функциональная схема ВЭУ, созданной и смоделированной с помощью MATLAB/Simulink, для изучения и рассмотрения основных электрических методов регулирования на основе задания и ограничения отрицательного момента на синхронном генераторе с постоянными магнитами, а также смоделированы регулирование в первой зоне, для получения максимально возможной мощности, и регулирование во второй зоне, для ограничения предельных значений мощности.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: май 2017 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Кулешов Е. В. Магнитоэлектрический синхронный генератор на базе асинхронной машины для автономной ветроэлектрической установки / Диссертация. – Владивосток. – 2001. – 160 с.
- Хорхордин А. В. Оптимальная система управления энергообеспечением с использованием ветроенергетической установки / А. В. Хорхордин, Сырых М. А. // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Зб. наук. пр. ХІII н.–т. конф. – Донецьк: ДонНТУ. – 2013. – 441 с.
- Махжуб М. Ф. Перспективы использования возобновляемых источников энергии и выбор конструкции генератора для работы в условиях Западной Захары / Диссертация. – Санкт-Петербург. – 2000. – 166 с.
- Huang Nantao, "Simulation of Power Control of a Wind Turbine Permanent Magnet Synchronous Generator System", 2013.
- Betz, Albert. "Behavior of vortex systems." (1933).
- T. Sun, Z. Chen, and F. Blaabjerg, "Voltage Recovery of Grid-Connected Wind Turbines After a Short-Circuit Fault," Proc. of the 29th Annual Conference of the IEEE Industrial Electronics Society, vol. 3, June 20-25, 2004, pp. 827-831.
- Рябов Д. Ю. Синтез нечеткого регулятора угла положения лопастей для адаптивной системы управления ветроэлектрической установкой / Диссертация. – Воронеж. – 2009. – 164 с.
- Черников В. Г. Стабилизация мощности ветрогенератора посредством механизма поворота лопасти / Доклад. – Донецк. – 2006. – 26 с.
- Денисов С. В. Система автономного питания с ветрогенератором / Диссертация. – Москва. – 2001. – 107 с.
- Кулешов Е. В. Магнитоэлектрический синхронный генератор на базе асинхронной машины для автономной ветроэлектрической установки / Диссертация. – Владивосток. – 2001. – 160 с.
- Костенко В. И. Преобразовательная техника / В. И. Костенко, А. А. Шавелкин. Учебное пособие. – Донецк:ДонНТУ. – 2006. – 232 с.
- Пивняк Г. Г. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией / Г. Г. Пивняк, А. В. Волков. – Днепропетровск. – 2006. – 470 с.