
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність вітроенергетики
- 2. Цілі та завдання
- 3. Аналіз потужності та крутящого моменту СДПМ
- 4. Вітротурбіна
- 5. Досліджувана система
- 6. Моделювання системи
- Висновки
- Перелік посилань
Вступ
Об’єктом дослідження в даній статті є вітроенергетична установка на базі синхронного генератора з постійним магнітом і дволанкового перетворювача частоти.
В даний час вітроенергетичні установки (ВЕУ) отримують все більше поширення, це пов'язано зі зростанням цін на паливо для теплових електростанцій. ВЕУ застосовуються в автономних системах електропостачання спільно з класичними дизельними або бензиновими генераторами. Це дозволяє забезпечити безперебійне живлення, при низькій витраті палива.
Загальні типи генераторів змінного струму, які використовуються в системах сучасних вітротурбін: асинхронний генератор з короткозамкненим ротором; асинхронний генератор з фазним ротором; машина подвійного живлення; синхронний генератор магнітоелектричного збудження; та синхронний генератор з постійними магнітами. Проте, в даній роботі зі змінною швидкістю безпосередньо використаний синхронний генератор з постійними магнітами (СГПМ), оскільки він забезпечує більш високу продуктивність за рахунок більш високої ефективності і меншого обслуговування, так як у нього на роторі знаходяться магніти і немає щіток.
1. Актуальність вітроенергетики
В даний час в усьому світі спостерігається підвищений інтерес до використання в різних галузях економіки нетрадиційних відновлюваних джерел енергії. Ведеться бурхлива дискусія про вибір шляхів розвитку енергетики. Це пов'язано, перш за все, зі зростаючою необхідністю охорони навколишнього середовища і виснаженням копалин природних ресурсів [1].
Великі вітряні електростанції включаються в загальну мережу, більш дрібні використовуються для забезпечення електрикою віддалених районів. На відміну від викопного палива, енергія вітру практично невичерпна, повсюдно доступна та більш екологічна. Розробка проектів, пов'язаних з відновлюваними джерелами електроенергії, зокрема вітроенергетикою, є перспективним напрямком в даний час.
Вітроенергетика є нерегульованим джерелом енергії. Вироблення вітроенергії залежить від сили вітру, фактора, що відрізняється великою мінливістю. Відповідно, видача електроенергії з вітрогенератора в енергосистему відрізняється великою нерівномірністю, як в добовому, так і в тижневому, місячному, річному і багаторічному розрізі [2].
Сучасна вітроенергетика має ряд проблем, які негативно впливають на підвищення ефективності енергозбереження [3]. Найбільш актуальні з них такі:
- забезпечення тривалого функціонування вітроелектричних агрегатів;
- забезпечення ефективного використання енергії вітру;
- стабілізація частоти електроенергії, яку постачають вітроустановки.
Також з ростом частки поновлюваних джерел енергії, набуває важливе місце якість енергії, яку вони поставляють в мережу. Ця проблема особливо актуальна для вітрових генераторів, оскільки швидкість вітрового потоку є дуже нестабільною величиною, а, отже, без якісного регулювання нестабільною виявляється і вихідна потужність вітрогенератора. Важкореалізовуванним завданням є точна синхронізація ВЕУ з мережею, з огляду на змінний характер вітру і великі маси вітроколеса.
2. Цілі та завдання
Основним завданням є отримання максимально можливої потужності від вітроелектростанції.
Від системи управління слід дотримуватися різних за своїм характером впливів – від безперервного управління з швидкою реакцією до дискретних аварійних захисних дій і процесів зі строго послідовними операціями. Оскільки різні керуючі функції в різній ступені впливають на забезпечення безпеки і надійності роботи ВЕУ, система не може бути оптимальною у всіх відносинах [2].
Основні технічні вимоги, що пред’являються до системи управління ВЕУ при паралельній роботі з мережею, представлені нижче:
- працездатність при заданих експлуатаційних умовах;
- автоматичний пуск і подальша синхронізація;
- регулювання потужності і частоти обертання ротора;
- контроль власних підсистем і устаткування ВЕУ, періодичний самоконтроль;
- формування і видача команд для управління елементними системами ВЕУ.
Завданнями системи управління є:
- підтримання частоти (активна потужність);
- підтримання напруги (реактивна потужність);
- показники якості електричної енергії;
- захист і автоматика вітроелектростанції (ВЕС).
При розгляді перерахованих вище вимог необхідно враховувати, що вітер характеризується непостійністю величини і напрямку, тому пульсації потужності одиничної ВЕУ повинні згладжуватися великою кількістю агрегатів.
Мета роботи – вивчення основ вітроенергетики, методів управління вихідною потужністю вітротурбіни, створення реальної робочої моделі системи та її моделювання. Основним завданням даної роботи є розробка імітаційної моделі автономної вітроенергетичної системи СГПМ з використанням пакета MATLAB/Simulink.
У даній роботі був використаний синхронний генератор з постійними магнітами (СГПМ), який заснований на роботі зі змінною швидкістю. Так як швидкість вітряної турбіни є змінною, генератор управляється за допомогою електронних пристроїв живлення. Інвертор використовується в ролі випрямляча для вихідного напруга СГПМ, далі накопичена на конденсаторі енергія за допомогою активного випрямляча, який виступає в ролі інвертора, передається в мережу. Вітроенергоустановки (ВЕУ) управляється так, щоб отримати максимальну вихідну потужність вітру, при цьому не перевищуючи граничних значень по швидкості обертання та моменту.
3. Аналіз потужності та крутящого моменту СДПМ
Для будь-якого СДПМ, електрична потужність може бути виражена в abc-системі координат наступним чином [4]:
| Pabc = vas ias + vbs ibs + vcs ics | (3.1) |
або в dq-системі наступним чином:
 |
(3.2) |
Як частина вхідної потужності в режимі двигуна активна потужність – це енергія, яка перетворюється з механічної енергії за допомогою машини, може бути виражена таким чином:
 , , |
(3.3) |
де
| ed = - ωe Lq iqs = - ωe ψq | (3.4) |
та
| eq = - ωe Ld ids + ωe ψr = - ωe ψd | (3.5) |
Тут ed та eq – проти-ЕРС в dq-системі координат, ψd та ψq – dq-потокосчеплення. Підставляючи вирази (3.4) і (3.5) в (3.3), активна потужність може бути повторно виражена таким чином:
Отже, електромагнітний момент, що розвивається в СДПМ можна вивести наступним чином:
або

де р – число полюсів в машині.
Блок синхронної машини з постійними магнітами працює в генераторному режимі. Режим роботи диктується знаком механічного обертального моменту (негативним для генераторного режиму). Синусоїдальна модель передбачає, що потік встановленій постійними магнітами статора являє собою синусоїду, тобто ЕРС є синусоїдальною.
Блок реалізує наступні рівняння.
Ці рівняння виражаються в dq-системі відліку.
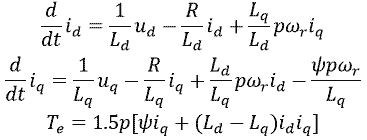
де
Ld, Lq – d- та q-складові індуктивності статора;
R – опір обмоток статора;
id, iq – d- та q-складові струмів статора;
ud, uq – d- та q-складові напруг статора;
ωr – кутова швидкість ротора;
ψ – амплітуда струму, індуцированого постійними магнітами ротора в фазах статора;
р – число пар полюсів;
Te – електромагнітний момент.
Механічна система.
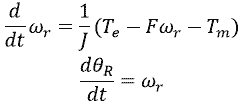
де
J – комбіновані інерція ротора та навантаження;
F – комбіновані в’язке тертя ротора та навантаження;
θR – кутове положення ротора;
Tm – механічний обертовий момент на валу.
На вхід Tm (механічний обертовий момент на валу машини) приходить негативна момент обертання, що вказує на режим генератора. Швидкість машини визначається її інерцією J і різницею між прикладеним механічним моментом Tm та внутрішнім електромагнітним моментом Te.
4. Вітротурбіна
Вітрову енергію можна розглядати як кінетичну енергію великої кількості частинок повітря із загальною масою m, зі швидкістю руху вітру Vw. Припускаючи, що всі частинки повітря рухаються з тією ж швидкістю і напрямком, перш ніж впливати на лопасті вітряної турбіни, накопичений потенціал кінетичної енергії вітру може бути виражений такою формулою:
 , , |
(4.1) |
де Е – кінетична енергія рухомих частинок повітря, m – загальна маса частинок повітря, в той час Vw – швидкість вітру. Оскільки частки повітря рухаються зі швидкістю Vw, загальна маса частинок – m, протягом періоду часу t, буде записана наступною формулою:
 , , |
(4.2) |
де ρ – густина повітря, A – охоплююча площа вітрової турбіни та r – радіус вітрового колеса. Підставляючи (4.2) в (4.1), кінетична енергія частинок повітря може бути виражене в такий спосіб:
 |
(4.3) |
З виразу (4.3), фактична енергія вітру в будь-який момент часу може бути представлена у вигляді:
 |
(4.4) |
Проте, потужність, показана в вираженні (4.4) може стояти тільки для максимальної потенційної потужності, яка доступна, коли вітер зі швидкістю Vw, проходить через область вітрового колеса з радіусом r. Насправді, тільки частина цієї потенційно доступної потужності може бути захоплена вітротурбіною. У 1919 році німецький вчений Альберт Бец спробував висловити дію частинок повітря (вітру), що проходять через вітротурбіну [5]. За ідеєю Бетца, після впливу на лопасті турбіни, швидкість вітру зменшується від VW до VW2, що означає, коли вітер проходить через лопасті турбіни, деяка кінетична енергія все ще залишається в частинках вітру. Відносини між енергією, захопленою вітротурбіною та потенційно максимальною енергією вітру може бути виражена таким чином:
 , , |
(4.5) |
де Pturbine є механічна потужність, захоплена вітротурбіною, і Cp – коефіцієнт потужності вітрової турбіни, який може бути виражений наступним чином [6]:
 , , |
(4.6) |
де
 |
(4.7) |
та
 |
(4.8) |
де β – кут повороту лопасті, а λ є відношенням швидкості крайньої точки на лопасті турбіни до швидкості вітру, а ωm – кутова швидкість генератора вітротурбіни. Значення коефіцієнтів (с1 ∼ с6), залежать від типу вітротурбіни і в даному дослідженні c1 = 0,5176; c2 = 116; c3 = 0,4; c4 = 5; c5 = 21 та c6 = 0,0068.
Кут β вказує на те, як же швидкість вітру впливає на лопасті вітрових турбін [7]. Кут повороту лопасті – це кут між орієнтацією лопасті та вектора швидкості вітру. Коли β = 0, на лопасть повністю впливає швидкість вітру, а вітрова турбіна буде фіксувати максимальну потужність вітру. Кут лопасті зазвичай фіксується нульовим, коли швидкість вітру нижче номінальної швидкості вітросистеми, щоб забезпечити високу ефективність захоплення енергії. Коли швидкість вітру стає більше номінального значення, енергія, захоплена системою буде перевищувати номінальну потужність, якщо кут β залишиться нульовим. Через це генератор і силові пристрої будуть працювати вище номінальної потужності, що є шкідливим для системи, особливо, якщо цей режим буде тривати протягом тривалого часу. На основі цього, система управління кутом повороту лопасті в залежності від різних умов вітру необхідна для вітрової турбіни [8]. Відповідно, потужність, захоплену вітротурбіною, можна переписати таким чином:
 |
(4.9) |
5. Досліджувана система
Функціональна схема змодельованої вітроенергосистеми представлена на рисунку 1.
Рисунок 1 – Функціональна схема ВЕУ
(анімація: 6 кадрів, 5 циклів повторення, 176 кілобайт)
Синхронний генератор з постійними магнітами (СГПМ) живиться від дволанкового перетворювача частоти і з боку вітроколеса на нього постійно подається негативний момент. В системі присутні наступні контури регулювання: два зовнішніх (контур регулювання швидкості та контур регулювання потоку) два внутрішніх (контури регулювання струму по осях d і q).
На турбіну приходить вітер зі швидкістю Vw, який передає частину кінетичної енергії, взаємодіючі з лопастями турбіни. Турбіна з'єднана валом, на якому виникає момент обертання, з синхронним генератором з постійними магнітами (СГПМ). З генератора знімаються такі механічні характеристики: кут повороту θR, рад та швидкість обертання валу ω, рад/с. У генераторі механічна енергія перетворюється на електричну і подається на автономний інвертор напруги (АІН), який працює в ролі випрямляча. На даному етапі отримуємо напруги uabc та струми статора iabc, значення яких йде на систему управління інвертором і на обчислення заданої швидкості обертання ωзад.
З АІН електрична енергія передається в ланку постійного струму, де за допомогою конденсатора великої ємності накопичується і переходить на активний випрямляч (АВ), який працює в зворотному режимі як інвертор. З ланки постійного струму знімається напруга Ud та передається в систему управління активного випрямляча (СУ АВ).
У схемі використовується дволанковий перетворювач частоти (ПЧ), який виступає в якості регульованого джерела енергії, щоб формувати вихідну в мережу напруги (струми) з заданими значеннями основної (першої) гармоніки. Для формування і регулювання вихідної напруги ПЧ використовується принцип широтно-імпульсної модуляції (ШІМ). Схеми АІН і АВ виконані з повністю керованих напівпровідникових силових ключів.
Джерело постійної напруги Ud регульоване і підтримує двосторонній обмін енергією з мережею. АВ дозволяє забезпечити повноцінний двосторонній обмін енергією з мережею, забезпечуючи при цьому практично синусоїдальні вхідні струми ПЧ (струми мережі).
Для регулювання в першій зоні, щоб витягувати при будь-яких швидкостях вітру максимально можливу потужність експериментальним шляхом була складена наступна таблиця.
| Vwind, м/с | ω, в. о. | Pел, в. о. |
|---|---|---|
| 1 | 0,06 | 2,2е-04 |
| 2 | 0,15 | 0,0019 |
| 3 | 0,21 | 0,0065 |
| 4 | 0,3 | 0,0152 |
| 5 | 0,36 | 0,0299 |
| 6 | 0,42 | 0,0517 |
| 7 | 0,51 | 0,082 |
| 8 | 0,57 | 0,1226 |
| 9 | 0,63 | 0,1743 |
| 10 | 0,72 | 0,2394 |
| 11 | 0,78 | 0,3186 |
| 12 | 0,87 | 0,4134 |
| 13 | 0,93 | 0,526 |
| 14 | 1 | 0,6568 |
Використавши дані точки, ми знайшли апроксимовану залежність 3-го порядку ω = f (P), по якій буде задаватися швидкість обертання для отримання максимального електричної потужності в першій зоні.
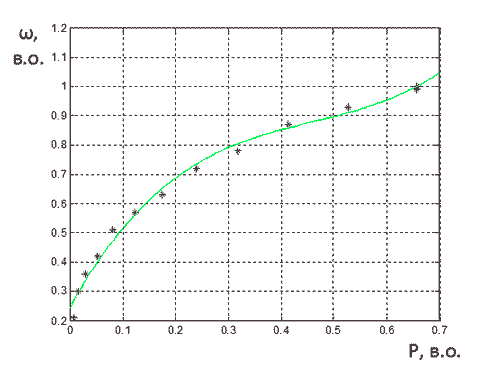
Рисунок 2 – Апроксимація експериментальних точок
ω (P) = 4,405x3 - 6,082x2 + 3,241x + 0,247
Регулювання у другій зоні здійснюється за допомогою кута повороту лопастей β, управління яким реалізовано за допомогою пропорційно-інтегрального регулятора. Коли швидкість вітру перевищує номінальну, потрібно пропускати зайву енергію. На ПІ-регулятор передається інформація про поточну різниці між вимірюваної електричною потужністю і максимальною потужністю Pmax* = 0,657 у в. о. в обмотці генератора, при перевищенні Pmax * кут β збільшується за певним законом для підтримки максимальної потужності.
Контур регулювання струму виконаний за допомогою релейних регуляторів струму. На РРС через канал зворотного зв'язку надходять сигнали з датчиків струму, які вимірюють струм кожної фази двигуна. Ці сигнали порівнюються з сигналами завдання на струм, які надходять з регуляторів швидкості та потокозчеплення через координатні перетворювачі. Налаштування контуру регулювання струму полягає у виборі коридору для РРС.
На вхід регулятора швидкості подається необхідне значення швидкості. Від сигналу завдання через зворотний зв'язок віднімається сигнал швидкості з генератора. Отриманий сигнал надходить на регулятор швидкості, який, як і РП, виконаний з обмеженням координат.
Розглянемо систему управління автономного інвертора напруги.
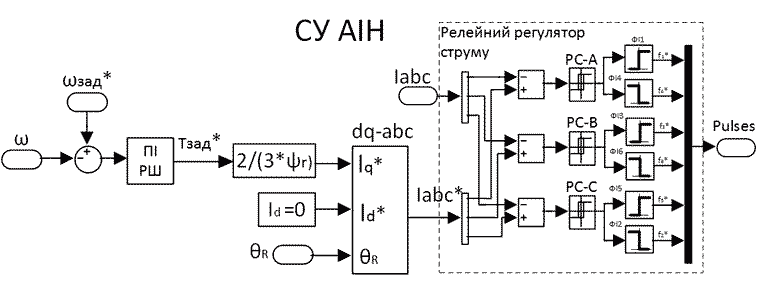
Рисунок 3 – Структурна схема системи управління автономного інвертора напруги (СУ АІН)
На вхід приходять такі сигнали: кут повороту генератора θR та його швидкість обертання ω, задана швидкість обертання ωзад*, струми на фазах статора Iabc.
Регулятор швидкості заснований на ПІ-регуляторі (блок ПІ РШ), на вхід якого приходить обчислена помилка між заданою і діючої швидкістю обертання ω. Виходом регулятора є момент обертання, оскільки потік ротора в СГПМ постійний і дорівнює ψr, обчислюється значення струму Iq.
Блок dq-abc виконує dq-перетворення складових обертового поля відліку в abc-фазні сигнали управління змінного струму.
Релейний регулятор струму заснований на порівнянні сигналів управління, з наявними сигналами струмів статора. Керуючі сигнали являють собою
симетричну трифазну систему струмів, пропорційних бажаним значенням відповідних фазних струмів генератора. Релейний регулятор містить вузли
порівняння, регулятори струму (РС) і формувачі дискретних імпульсів (ФІ). У функції компетенції формування імпульсів управління
Pulses
.
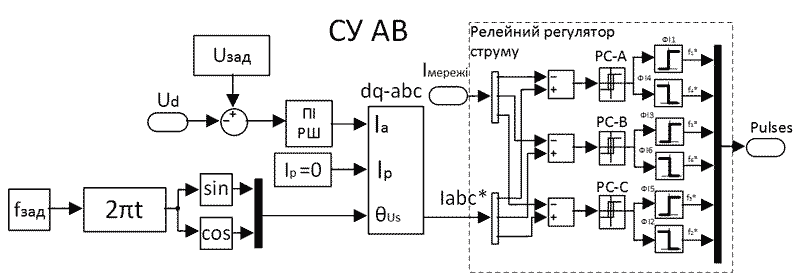
Рисунок 4 – Структурна схема системи управління активного випрямляча (СУ АВ)
На вхід системи приходять такі сигнали: задана напругу Uзад, напруга ланки постійного струму Ud, задана частота fзад та струми мережі Iмережі.
Принцип системи управління АВ схожий на СУ АІН з пропорційно-інтегральним регулятором швидкості (ПІ РШ), блоком dq-abc, які виконують dq-перетворення і релейним регулятором струму, але з деякими відмінностями.
Використавши задану частоту fзад, за допомогою тригонометричних операцій ми вираховуємо необхідний кут повороту мережі θUs.
На вхід блоку ПІ РШ приходить помилка між заданою напругою Uзад і напругою ланки постійного струму Ud. Виходом регулятора є активна частина струму Iа, яка разом зі струмом Iр = 0 (оскільки потік ротора в СГПМ постійний і дорівнює ψr) приходить на блок перетворення dq-abc.
Блок dq-abc виконує dq-перетворення складових обертового поля відліку в abc-фазні сигнали управління змінного струму.
Релейний регулятор струму заснований на порівнянні сигналів управління, з наявними сигналами струмів мережі. Керуючі сигнали являють собою
симетричну трифазну систему струмів, пропорційних бажаним значенням відповідних фазних струмів мережі. Релейний регулятор містить вузли порівняння,
регулятори струму (РС) та формувачі дискретних імпульсів (ФІ). У функції компетенції формування імпульсів управління
Pulses
керованими тиристорами.
6. Моделювання системи
Моделювання силової частини виконано за допомогою прикладної програми POWERSYSTEM. У неї входять:
- АВН (активний випрямляч напруги), виконаний за трифазною мостовою схемою на IGBT із зворотними діодами;
- Автономний інвертор напруги, виконаний за трифазною мостовою схемою на IGBT із зворотними діодами;
- В ланці постійного струму встановлений конденсатор С = 20 000 мкФ, на вході з боку трифазного джерела встановлені три дроселі индуктивністью 2 мГн;
- Permanent Magnet Synchronous Machine (СДПМ) з параметрами схеми заміщення.
Використовується дві системи управління (одна управляє АВ, інша – АІН) виконані за допомогою блоків SIMULINK:
- СУ АІН (регулятор напруги в ланці постійного струму), пропорційно-інтегрального типу, налаштовується подібно регулятору швидкості в двухкратно-інтегрувальній системі швидкості;
- Координатний перетворювач, формує синусоїдальні сигнали завдання струму мережі, в функції активного Іа і реактивного Iр струмів завдання, синхронізований з напругою мережі;
- СУ АВ (релейні регулятори струму мережі), формують три
струмових трубки
по фазах струмів мережі (порівнюються задані струми і струми зворотного зв'язку).
Результати моделювання представлені на наступних рисунках. Тут швидкість вітру становить 10 м/с, в період часу 0,5 с збільшуємо до 14 м/с, що є номінальною для вітротурбіни, в 1 с – зростає до 22 м/с і спостерігаємо за поведінкою системи.
З графіків видно, що регулювання в першій зоні відбувається до часу t = 1 c. Після 1 с включається регулятор потужності, та потужність, швидкість і момент утримуються на номінальному рівні.
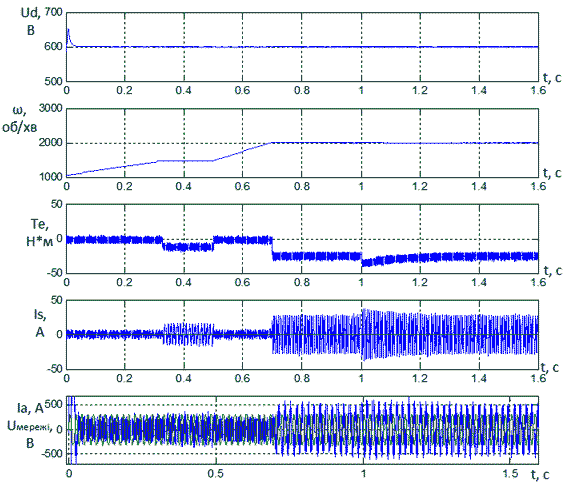
Рисунок 5 – Результати моделювання, де Ud – напруження в ланці постійного струму, ω – швидкість обертання, Te – момент на валу генератора, Is – струм статора, Ia і Uмережі – струм та напруга мережі.
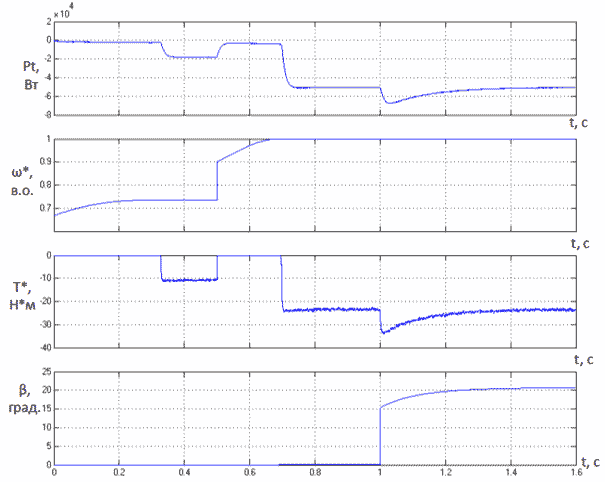
Рисунок 6 – Результати моделювання, де Pt – вихідна потужність турбіни, ω* – задана швидкість, T* – задний момент, β – кут повороту лопастей
Недоліком розглянутої моделі є відсутність впливу багатомасової системи на процеси, а також відсутність алгоритму пошуку максимальної потужності. Крім того в роботі розглядається постійна швидкість вітру, що не відповідає дійсності. Також в роботі не розглядається СГПМ з явнополюсним ротором, та двозонне регулювання.
Висновки
У даній роботі були вивчені основи вітроенергетики, показана її актуальність на сьогоднішній день, розглянуті основні цілі та завдання вітроенергетичної промисловості. Вітроенергетика є перспективним напрямком енергетики та інженерії в цілому з точки зору економіки та екології, оскільки є дешевим видом енергії, що використовує поновлюваний ресурс – вітер, і при цьому не забруднює навколишнє середовище.
Також в роботі представлені основні поняття моделювання системи вітротурбіна–СГПМ
, які використовувалися для
створення і моделювання власної вітроенергетичної системи.
Представлена функціональна схема ВЕУ, створеної і змодельованої за допомогою MATLAB/Simulink, для вивчення і розгляду основних електричних методів регулювання на основі завдання і обмеження негативного моменту на синхронному генераторі з постійними магнітами, а також змодельовані регулювання в першій зоні, для отримання максимально можливої потужності, і регулювання в другій зоні, для обмеження граничних значень потужності.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: травень 2017 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати.
Перелік посилань
- Кулешов Е. В. Магнітоелектричний синхронний генератор на базі асинхронної машини для автономної вітроелектричної установки / Дисертація. – Владивосток. – 2001. – 160 с.
- Хорхордин А. В. Оптимальна система управління енергозабезпеченням з використанням вітроенергетичної установки / А. В. Хорхордин, Сирих М. А. // Автоматизація технологічних об’єктів та процесів. Пошук молодих. Зб. наук. пр. ХІII н.–т. конф. – Донецьк: ДонНТУ. – 2013. – 441 с.
- Махжуб М. Ф. Перспективи використання відновлюваних джерел енергії та вибір конструкції генератора для роботи в умовах Західної Сахари / Дисертація. – Санкт-Петербург. – 2000. – 166 с.
- Huang Nantao, "Simulation of Power Control of a Wind Turbine Permanent Magnet Synchronous Generator System", 2013.
- Betz, Albert. "Behavior of vortex systems." (1933).
- T. Sun, Z. Chen, and F. Blaabjerg, "Voltage Recovery of Grid-Connected Wind Turbines After a Short-Circuit Fault," Proc. of the 29th Annual Conference of the IEEE Industrial Electronics Society, vol. 3, June 20-25, 2004, pp. 827-831.
- Рябов Д. Ю. Синтез нечіткого регулятора кута положення лопастей для адаптивної системи управління вітроелектричної установкою / Дисертація. – Воронеж. – 2009. – 164 с.
- Черников В. Г. Стабілізація потужності вітрогенератора за допомогою механізму повороту лопасті / Доповідь. – Донецьк. – 2006. – 26 с.
- Денисов С. В. Система автономного живлення з вітрогенератором / Дисертація. – Москва. – 2001. – 107 с.
- Кулешов Е. В. Магнітоелектричний синхронний генератор на базі асинхронної машини для автономної вітроелектричної установки / Дисертація. – Владивосток. – 2001. – 160 с.
- Костенко В. І. Перетворювальна техніка / В. І. Костенко, А. А. Шавелкін. Навчальний посібник. – Донецьк: ДонНТУ. – 2006. – 232 с.
- Півняк Г. Г. Сучасні частотно-регульовані асинхронні електроприводи з широтно-імпульсною модуляцією / Г. Г. Півняк, А. В. Волков. – Дніпропетровськ. – 2006. – 470 с.