
Содержание
- Введение
- 1. Актуальность
- 2. Цель и задачи исследования, планируемые результаты
- 3. Разработка стенда
- 3.1 Выбор электродвигателя
- 3.2 Выбор микроконтроллера
- 3.3 Выбор драйвера
- Список источников
Введение
В современном мире состояния электрификации промышленности и развития систем комплексной автоматизации показывает, что их основой является регулируемый электрический привод, который получает всё более широкое применение во всех сферах жизни и деятельности общества - от промышленного производства до сферы быта.
Такую тенденцию можно проследить по быстрому развитию технологии 3D печати.С каждым днем технология берущая корни от фрезерных ЧПУ все быстрее совершенствуется и становится доступнее.Сегодня на 3D-принтерах печатается почти все: можно напечатать макет здания или даже саму постройку, пищу, металлоконструкции, биопротезы [1]. Также существует технология способная создавать живые человеческие ткани, замещать жизненно важные органы и быстро залечивать открытые раны уже существует [2].
1. Актуальность
Из вышесказанного следует, что для дальнейшего развития подобных технологий и освоения их «широкими массами», важна дешевизна и качество обработки в подобных системах. И тут ключевую роль играет управление электропривода. В данной выпускной работе для разработки модели управления будет использоваться ПО Matlab которое уже продолжительное время используется для моделирования различных промышленных процессов автоматизации вплоть до робототехники. Физическая модель содержит шаговые двигатели, которые относительно сервопривода дешевле, но в худшей степени управляются. Отсюда вытекает важность повышения точности управления шагового двигателя и повышения эффективности электропривода в целом,с помощью доступного ПО Matlab в среде Simulink.
2. Цель и задачи исследования, планируемые результаты
Целью исследования является разработка системы управления электропривода механизма с двумя степенями свободы.
Основные задачи исследования:
- Выбор электродвигателя.
- Выбор контроллера и драйвера электропривода.
- Реализация физической модели.
- Проектирование математической модели в MATLAB.
- Анализ полученных данных.
Для экспериментальной оценки полученных теоретических результатов и формирования фундамента последующих исследований, в качестве практических результатов планируется разработка Simulink-модели электропривода в программе Matlab.
3. Разработка стенда
3.1 Выбор электродвигателя
3.1 Выбор электродвигателя.
Шаговый двигатель это электромеханическое устройство, которое преобразует электрические импульсы сигналов управления в угловые перемещения ротора (дискретные механические перемещения) с фиксацией его в заданном положении.
Шаговый двигатель имеет возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это больше подходит для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика [3].
Рисунок 1 - Принцип работы шагового двигателя
Достоинства шагового двигателя:
- Стабильность. Может управлять широким диапазоном нагрузок.
- Не требует обратной связи. Угол поворота заложен в конструкции двигателя.
- Относительно не дорогой по отношению к другим системам контроля движения.
- Стандартизированные размер рамы и характеристики работы.
- Технология автоматического подключения. Прост в установке и использовании.
- Безопасен. А случае любой поломки происходит автоматическая остановка двигателя.
- Продолжительный срок эксплуатации.
- Превосходный крутящий момент на низких скоростях.
- Повторяемость. Возврат четко к кому же самому положению.
- Защита от перегрузки. Двигатель не может быть поврежден из-за механической перегрузки.
Недостатки шагового двигателя:
- Низкая эффективность. Двигатель использует значительную энергию несмотря на нагрузку.
- Крутящийся момент падает при увеличении скорости вращения (вращающийся момент обратно пропорционален скорости).
- Низкая точность. 1:200 при полной нагрузке и 1:2000 при частичной нагрузке.
- Склонен к резонансу. Требует микро-шаги для плавного движения.
- Пропущенные шаги не отображаются.
- Низкий крутящийся момент по отношению к инерции. Не способен быстро увеличивать нагрузку.
- Двигатель не будет набирать скорость после мгновенной перегрузки.
- Шумный на средней и высокой скоростях.
- Низкая полезная мощность по отношению к размеру и весу.
Серводвигатели— тип электромеханических приводов, которые не вращаются постоянно, как шаговые двигатели, а по сигналу перемещаются в определенное положение и сохраняют его, а по следующему сигналу перемещаются в другое положение.
В сервоприводах также используется механизм обратной связи, поэтому он может обрабатывать ошибки и при позиционировании их исправить. Такая система называется следящей. Таким образом, если какая-то сила оказывает давление привод и будет изменять его положение, то сервопривод будет применять силу в противоположном направлении и попытается исправить ошибку. Это обуславливает высокую точность позиционирования [4].
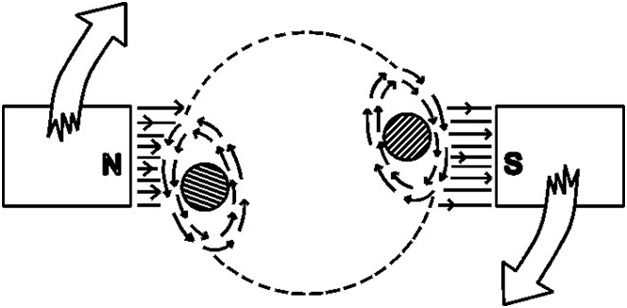
Рисунок 2 - Принцип работы серводвигателя
Преимущества серводвигателей:
- При малых размерах двигателя можно получить высокую мощность
- Большой диапазон мощностей
- Отслеживается положение, за счет использования обратной связи
- Высокий крутящий момент по отношении к инерции
- Возможность быстрого разгона и торможения
- При высокой скорости, высокий крутящий момент
- Допустимый предел шума при высоких скоростях
- Полное отсутствия резонанса и вибрации
- Точность позиционирования
- Широкий диапазон регулирования скорости
- Точность поддержания скорости и стабильность вращающего момента
- Высокий статический момент при нулевой скорости вращения
- Высокая перегрузочная способность
- Малое время разгона и торможения
- Малый момент инерции двигателя, низкий вес, компактные размеры
| Шаговые двигатели | Серво двигателя | |
| Срок эксплуатации и обслуживание | Шаговые двигатели – нет щеток, это увеличивает срок эксплуатации до многих лет, единственным слабым местом являются подшипники, могут работать в большом диапазоне высоких температур. Срок эксплуатации в разы дольше любого типа двигателя. | Из всех видов серво двигателей, самые дешевые это двигателя коллекторного типа (со щетками), они менее надежны, чем шаговые двигатели и требуют замены щеток примерно через 5000 часов непрерывной работы. Другой тип бесколлекторных сервоприводов производятся по надежности как и шаговые двигателя, отсутствие щеток увеличивает срок эксплуатации, но не уменьшает стоимость ремонта. В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать. |
| Ремонт | Очень тяжело повредить и износить подшипник. Как и в любом двигателе возможно повреждение обмотки двигателя. Из низкой цены проще купить новый шаговый двигатель. | В некоторых случаях проще и дешевле купить новый двигатель, а не пытаться его отремонтировать. |
| Точность перемещений | При использование точных механизмов, может быть не ниже +/- 0.01 мм | сервоприводы имеют высокую динамическую точность до 1-2мкм и выше (1 мкм = 0.001 мм) |
| Скорость перемещения | В лазерно гравировальных станках скорость 20 – 25 метров в минуту. Если мы говорим о фрезерных станках ЧПУ с тяжелыми порталами и балками. Максимальная скорость перемещения до 9 м/мин. | С использованием сервоприводов в станках с ЧПУ возможно достижение скоростей до 60 м/мин при использование высокосортной механике. |
| Скорость разгона | до 120 об/мин за секунду | до 1000 об/мин за 0,2 секунды |
| Потеря шагов при повышении скорости и нагрузки | При высоких скоростях и высоких нагрузках происходит потеря шагов. Эта не проблема возможна при воздействии внешних факторов: ударов, вибраций, резонансов и т.п. | У серво двигателей присутствует обратная связь, что полностью исключает потерю шагов. |
| Принудительная остановка (столкновение с препятствием) | Принудительная остановка шагового двигателя не вызывает у него никаких повреждений | В случае принудительной остановки серводвигателя, драйвер мотора должен правильно среагировать на данную остановку. В противном случае по обратной связи подается сигнал на доработку не пройденного расстояния, повышается ток на обмотках, двигатель может перегреться и сгореть |
| Разница в цене | По цене шаговый двигатель намного дешевле серво двигателя. | Минимум в 1,5 раз дороже шагового двигателя. |
Исходя из вышеизложенного сравнения для реализации рабочего стенда был выбран шаговый двигатель. Из табл. 1 видно, что главным преимуществом серво двигателя над шаговым двигателем является наличие обратной связи.
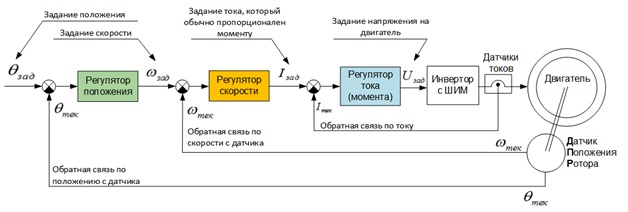
Рисунок 3 - Трехконтурная система подчиненного регулирования [5]
Обратная связь дает большие возможности для управления двигателя, поэтому для максимальной компенсации данного недостатка планируется использования режима позиционирования. Это позволит ограничивать шаговый двигатель по скорости, ускорению и току.
3.2 Выбор микроконтроллера.
3.2 Выбор микроконтроллера.
Для реализации поставленных задач необходима немалая производительность микроконтроллера и совместимость с MATLAB. На основе этих критериев был выбран STM32F4Discovery.
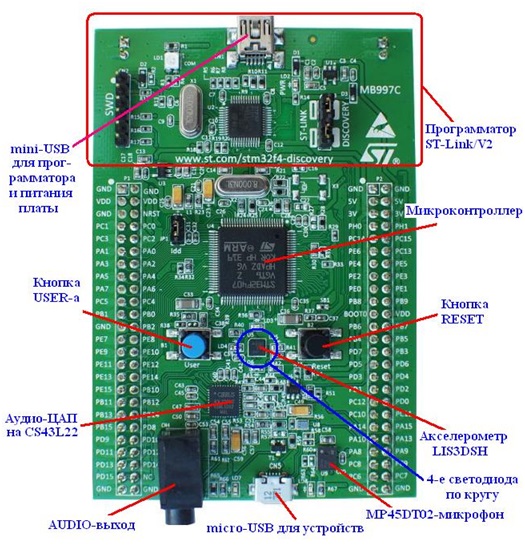
Рисунок 4 - STM32F4Discovery
В основе платы лежит микроконтроллер STM32F407VGT6 с ядром ARM Cortex-M4 и максимальной тактовой частотой 168 МГц, что позволяет использовать его в цифровой обработке сигналов и других приложениях, где необходимо максимальное быстродействие. Наличие 1 мегабайта флеш-памяти и 192 кбайт ОЗУ просто впечатляют. Присутствует вся стандартная периферия, такая как DAC, ADC, SPI, I2C, PWM, RTC. Также есть поддержка USB хоста и Ethernet, имеется интерфейс DCMI для подключения камеры и SDIO для подключения SD карт, а также аппаратный генератор случайных чисел. Микроконтроллеры STM32f4 отличаются наличием предварительно прошитого в них загрузчика. С помощью этого загрузчика пользователь загружает свою программу в микроконтроллер без использования традиционных отдельных аппаратных программаторов и соединяется с компьютером через USB-интерфейс [6].
3.3 Выбор драйвера.
Как правило, логические сигналы для управления шаговым двигателем формирует микроконтроллер. Ресурсов современных микроконтроллеров вполне хватает для этого даже в самом ”тяжелом” режиме – микрошаговом.
Для подключения шаговых двигателей через слаботочные логические сигналы микроконтроллеров необходимы усилители сигналов – драйверы.
В функцию драйверов входит:
- обеспечение необходимого тока и напряжения на фазных обмотках двигателя;
- коммутация обмоток;
- включение;
- выключение;
- смена полярности;
- защита коммутирующих элементов от напряжения самоиндукции обмоток [7].
Для обеспечения вышеупомянутого функционала был выбран драйвер шагового двигателя L298n.
Рисунок 5 - Драйвер шагового двигателя L298N
L298N это полный мостовой драйвер для управления двунаправленными нагрузками с токами до 2 А и напряжением до 46 В.
- Драйвер разработан для управления компонентами с индуктивными нагрузками, такими как электромагниты, реле, шаговые двигатели.
- Сигналы управления имеют TTL совместимые уровни.
- Два входа разрешения дают возможность отключать нагрузку независимо от входных сигналов микросхемы.
- Предусмотрена возможность подключения внешних датчиков тока для защиты и контроля тока каждого моста.
- Питание логической схемы и нагрузки L298N разделены. Это позволяет подавать на нагрузку напряжение другой величины, чем питание микросхемы.
- Микросхема имеет защиту от перегрева на уровне + 70 °C.
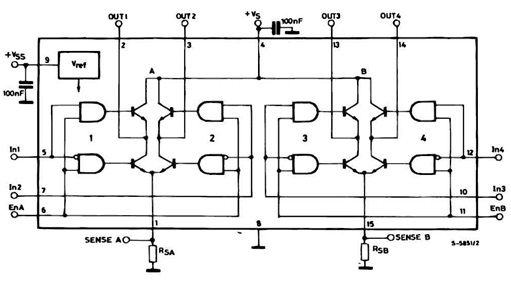
Рисунок 6 - Структурная схема L298N [8]
Замечания
На момент написания данного реферата магистерская работа еще не завершена. Предполагаемая дата завершения: май 2017 г. Полный текст работы, а также материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
1. Аддитивные технологии в машиностроении / Зленко М.А., Попович А.А., Мутылина И.Н. Учебное пособие. – Санкт-Петербург, СПбГУ, 2013 - 6с.
2. 3Д печать органов [электронный ресурс] – Режим доступа: 3d-expo.ru
3. Кенио Т. – Шаговые двигатели и их микропроцессорные системы управления / Перевод с англ. М.: Энергоатомиздат, 1987. — 200 с.
4. Сервопривод [электронный ресурс] – Режим доступа: Википедия
5. Поддержание положения в сервоприводе: подчинённое регулирование vs шаговый режим [электронный ресурс], – Режим доступа geektimes.ru
6. STM32F4DISCOVERY [электронный ресурс] – Режим доступа: www.st.com
7. Драйверы шагового двигателя: униполярный, биполярный, L298N. [электронный ресурс] – Режим доступа: mypractic.ru
8. Программируемые роботы. Создаем робота для своей домашней мастерской / Вильямс Дж. Пер. с анг. А. Ю. Карцева – М.: НТ Пресс, 2006. – 240с.