Аннотация
Данная статья посвящена САУ балансирующим роботом в виде перевёрнутого маятника. Рассматривается и решается проблема определения угла наклона платформы в реальном времени с помощью микромеханических систем.
Ключевые слова:
САУ, МЭМС, балансирующий робот, датчик, регулятор, перевёрнутый маятник, гироскоп, акселерометр.
Текст статьи
Конструкция балансирующего робота в виде перевёрнутого маятника является довольно простой и именно поэтому имеет ряд полезных свойств [1].
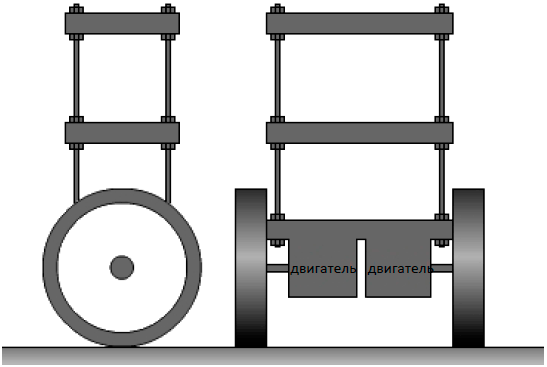
Рисунок 1 – Платформа в виде перевернутого маятника
Наличие двух колес уменьшает габариты и повышает надежность, а раздельное управление каждым из них (с помощью двигателей постоянного тока [4]) делает платформу очень маневренной, в частности платформа может поворачивать при движении или выполнять разворот на месте. Но главным недостатком является то, что платформа неустойчива и при выключении двигателей при малейшем возмущении платформа потеряет баланс и упадет. Сделать платформу устойчивой призвана система автоматического управления.
Основной задачей для поддержания динамического равновесия является правильное определение текущего угла наклона всей конструкции относительно состояния равновесия [2].
На сегодняшний день передовым средством для этого являются микромеханические датчики движения: гироскопы и акселерометры.
Микромеханический акселерометр измеряет ускорение, которое действуют на него в плоскости Х или Y, а из-за того, что сила тяжести тоже является ускорением, то рассчитывая арксинус отношения показателей Х и Y датчика мы можем не напрямую измерять угол наклона конструкции (рис. 2а). Но проблема заключается в том, что движение конструкции также создает ускорение, которое отражается на показателях датчика и не позволяет использовать только один акселерометр для определения угла наклона платформы (рис. 2б).
Микромеханический гироскоп измеряет угловую скорость, то есть только скорость изменения угла наклона платформы. Это позволяет получать значение угла наклона благодаря интегрированию показателей датчика, но из-за временного и температурного дрейфа нуля, а также неизвестность начального угла наклона, его показатели могут быть значительно искажены в состоянии покоя, но, в отличие от акселерометра, гироскоп не чувствителен к движениям платформы, поэтому имеет высокую точность, когда платформа находится в динамическом состоянии.
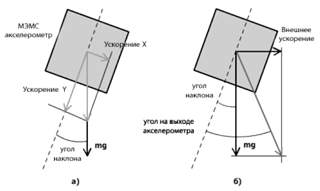
Рисунок 2 – Измерение угла наклона с помощью МЭМС акселерометра (a – в состоянии покоя, б – при действии внешнего ускорения)
Для определения угла с помощью гироскопа необходимо интегрировать его показания, например, методом прямоугольников:

где:
α0 – предыдущее значение угла;
w – текущее значение угловой скорости;
Δt – время между измерениями.
То есть гироскоп опрашивается постоянно с интервалом времени t, получается моментальное значение угловой скорости w и вычисляется текущее значение угла α добавив к предыдущему значению угла α0 приращение за данный промежуток времени. Но при таком подходе вместе с приростом постоянно суммируется и ошибка, вызванная погрешностью гироскопа.
Поэтому, периодически необходимо корректировать значение вычисленных углов. Для такой корректировки используется акселерометр, измеряющий проекцию ускорения на чувствительную ось.
Для определения угла наклона α можно воспользоваться формулой:

Но акселерометр выдает точные значения только в состоянии покоя. Во время движения к показаниям добавляется проекция вектора собственного ускорения и значение угла будет смещено.
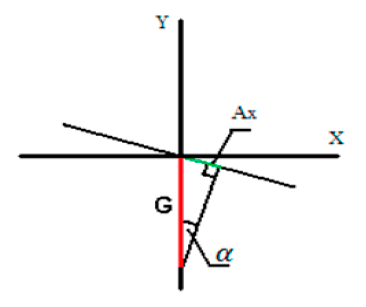
Рисунок 3 – Определение угла акселерометром
Поэтому возникает необходимость в применении алгоритмов фильтрации показаний с МЭМС для наиболее точного определения угла наклона [3]. Целесообразным является использование обоих типов датчиков одновременно для компенсации недостатков каждого.
Список использованной литературы
1. Капица П. Л. Динамическая устойчивость маятника при колеблющейся точке подвeса. Журнал экспериментальной и теоретической физики, т. 21, вып. 5, 1951. – с. 588–597.
2. Сборник статей по вопросам ТАУ под ред. Б. Т. Трофимова. [Электронный ресурс] // Федосов Б. Т. Управление неустойчивыми объектами. Режим доступа: model.exponenta.ru
3. Певзнер Л. Д. Теория систем управления. – М.: Издательство МГТУ, 2002. – 469 с.
4. Москаленко В. В. Электрический привод: Учеб. Пособие для студентов учреждений сред. проф. Образования. – М.: Мастерство; Высшая школа, 2001. – 368 с.