Введение
Конструкция в виде перевернутого маятника имеет ряд проблем, которые необходимо решить для получения устойчивого объекта, способного автоматически передвигаться:
– проблема определения угла наклона платформы в реальном времени;
– формирование компенсирующего воздействия и поддержание баланса платформы;
– движение платформы, а именно начало и прекращение движения, при которых возникают ускорения и моменты, которые заваливают платформу.
На сегодняшний день описанные выше проблемы не являются новыми и имеют ряд известных решений.
Задачам про динамическое равновесие перевернутого маятника посвящено много исследований, отмеченные работами [1, 2]. В них устойчивость равновесия маятника в верхнем положении обеспечивается за счет периодических вертикальных вибраций точки опоры. Частота этих вибраций должна быть достаточно большой, что не всегда удобно реализуется на практике. Для стабилизации перевернутого маятника применяются различного рода стяжные системы управления, например [3]. Самым простым методом поддержания баланса перевернутого маятника является реализация ПИД-алгоритма по отклонению от состояния равновесия, который формирует управляющее воздействие напрямую в исполнительные органы в зависимости от величины угла отклонения платформы. Метод стабилизации перевернутого маятника с помощью горизонтальных перемещений точки опоры предложен в [4]. Вместе с тем, кроме стабилизации, практический интерес представляет также и транспортировка точки опоры перевернутого маятника в другое пространственное положение с сохранением вертикальной ориентации маятника. Такая задача возникает, например, при перемещении высотного строительного крана по рельсам. В одномерном варианте эта задача решается различными методами. Рассмотрим подробнее некоторые из них.
Управление обратным маятником с помощью ПИД-регулятора.
Проведём моделирование системы стабилизации с помощью ПИД-регулятора:
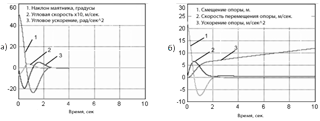
Рисунок 1 – Переходные процессы в системе стабилизации маятника по углу его отклонения от вертикали (а – наклон маятника, б – смещение опоры)
В одноканальной схеме, где управляемой величиной является только угол отклонения маятника от вертикали, ПИД-регулятор энергично выводит маятник вверх при начальных углах отклонения, меньших плюс-минус 60 градусов, но не возвращает его опору в начало координат: маятник выезжает с постоянной скоростью все дальше вправо (рис. 1).
Для возврата маятника в начало координат можно организовать еще одну обратную связь, по смещению опоры, суммируя её с углом отклонения. Но более эффективно будет добавить в эту сумму ещё и производные по времени от угла отклонения и смещения опоры (рис. 2).
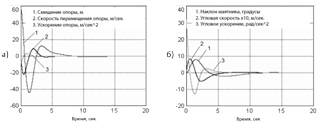
Рисунок 2 – Переходные процессы в системе с управлением по взвешенной сумме отклонений и скоростей (а - наклон маятника, б - смещение опоры)
Управление по взвешенной суммой отклонений и скоростей позволяет придавать маятнику вертикальное положение, грузом вверх, и возвращать маятник в начало координат за 10 секунд. Отклонение опоры маятника не превышает 8 метров при начальных углах отклонения, меньших 60°.
В результате проведенных исследований было установлено, что система управления на основе ПИД-регуляторов способна выводить маятник вверх, по крайней мере, при начальных отклонениях, меньших 60°.
Нечёткое управление.
Контроллеры нечёткой логики – наиболее важное применение теории нечёткого множества. Их функционирование несколько отличается от работы обычных контроллеров; для описания системы используются знания экспертов вместо дифференциальных уравнений. Эти знания могут быть выражены естественным образом с помощью лингвистических переменных, которые описываются нечетким множеством.
Система «тележка – перевернутый маятник» изображена на рис. 3. Состоянии системы в каждый момент времени характеризуется значением ее параметров: положение системы – x(t); линейная скорость системы – x'(t); угол отклонения маятника – Θ(t); угловая скорость маятника – Θ'(t).
Система может перемещаться вдоль одной оси в интервале [-100; 100] м. Маятник может совершать колебания в интервале [-90; 90] градусов. Если значение положения системы или угла маятника превышают указанные интервалы, то считается, что система управления потерпела неудачу.
Целью управления является придание системе состояния равновесия, которое характеризуется нулевым значением отклонения маятника от вертикальной оси и нулевым значением позиции тележки, за счет передвижения системы вдоль оси x, при любом начальном допустимом положении тележки и маятника.
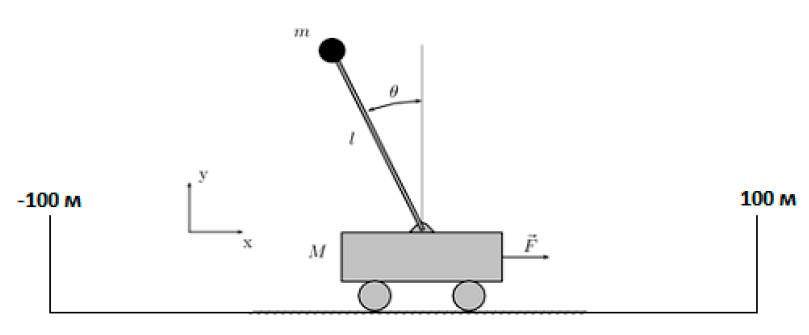
Рисунок 3 – Система «Тележка – перевёрнутый маятник»
В результате была получена база из 8 правил:
– IF (позиция отрицательная) AND (угловая скорость отрицательная малая) THEN (сила положительная большая);
– ELSE IF (позиция положительная) AND (угловая скорость отрицательная малая) THEN (сила положительная большая);
– ELSE IF (угол отрицательный) AND (угловая скорость неотрицательна) THEN сила нулевая;
– ELSE IF (скорость отрицательная) AND (угол положительный) AND (угловая скорость нулевая) THEN сила нулевая;
– ELSE IF (скорость отрицательная) AND угол (положительный) AND (угловая скорость положительная) THEN сила положительная велика;
– ELSE IF (позиция отрицательная) AND (скорость неотрицательна) AND (угол неотрицательный) AND (угловая скорость неотрицательна) THEN сила положительная велика;
– ELSE IF (позиция положительная) AND (скорость неотрицательна) AND (угол неотрицательный) AND (угловая скорость неотрицательна) THEN сила положительная велика.
Здесь приняты следующие обозначения: позиция – позиция тележки; скорость – скорость тележки; угол – угол отклонения маятника; угловая скорость – угловая скорость маятника.
Несмотря на небольшое количество правил, данная база правил справилась с задачей.
Использование МЭМС-датчиков для измерения угла наклона.
Основной задачей для поддержания динамического равновесия является правильное определение текущего угла наклона всей конструкции относительно состояния равновесия.
На сегодня передовым средством для этого являются микромеханические датчики движения: гироскопы и акселерометры.
Микроэлектромеханические системы (МЭМС) – технологии и устройства, которые объединяют в себе микроэлектронные и микромеханические компоненты. МЭМС устройства, как правило, изготавливают на кремниевой подложке с помощью технологии микрообработки, аналогично технологии изготовления однокристальных интегральных микросхем. Преимущества таких датчиков – компактность (размеры микросхем: 5х5х1 мм и менее), экономичность и надежность.
Микромеханический акселерометр измеряет ускорение, которое действуют на него в плоскости Х или Y, а из-за того, что сила тяжести тоже является ускорением, то рассчитывая арксинус отношения показателей Х и Y датчика мы можем не напрямую измерять угол наклона конструкции (рис. 4а). Но проблема заключается в том, что движение конструкции также создает ускорение, которое отражается на показателях датчика и не позволяет использовать только один акселерометр для определения угла наклона платформы (рис. 4б).
Микромеханический гироскоп измеряет угловую скорость, то есть только скорость изменения угла наклона платформы. Это позволяет получать значение угла наклона благодаря интегрированию показателей датчика, но из-за временного и температурного дрейфа нуля, а также неизвестность начального угла наклона, его показатели могут быть значительно искажены в состоянии покоя, но, в отличие от акселерометра, гироскоп не чувствителен к движениям платформы, поэтому имеет высокую точность, когда платформа находится в динамическом состоянии.
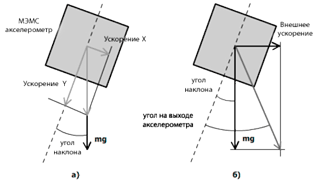
Рисунок 4 – Измерение угла наклона с помощью МЭМС акселерометра (а – в состоянии покоя, б – при действии внешнего ускорения)
Поэтому целесообразным является использование обоих типов датчиков одновременно для компенсации недостатков каждого.
Выводы
Таким образом, оптимальным будет следующее решение.
Угол наклона конструкции рассчитывается косвенно благодаря показателям МЭМС-датчиков движения (акселерометру и гироскопа), которые должны быть пропущены через фильтр Калмана, который нужно рассчитать, опираясь на параметры выбранных датчиков, это позволит получить очень точный расчёт угла наклона конструкции и компенсировать все недостатки датчиков движения, благодаря использованию данных каждого из них только в диапазоне частот, в котором влияние этих недостатков является минимальным.
Балансировку платформы нужно осуществлять с помощью двух независимых ПИД-алгоритмов для каждого из исполнительных органов, точная настройка каждого из этих алгоритмов обеспечивает близкие переходные функции систем при одинаковом разветвлении на входе, несмотря на разные параметры самих исполнительных механизмов. Это позволит получить лучшие результаты, чем при управлении с помощью одного контура, и при этом не усложняя систему управления в целом.
Список использованной литературы
1. Капица П. Л. Динамическая устойчивость маятника при колеблющейся точке подвeса. Журнал экспериментальной и теоретической физики, т. 21, вып. 5, 1951. – 588–597 с.
2. Сборник статей по вопросам ТАУ под ред. Б. Т. Трофимова. [Электронный ресурс] // Федосов Б.Т. Управление неустойчивыми объектами. Режим доступа: model.exponenta.ru
3. Певзнер Л. Д. Теория систем управления. – М.: Издательство МГТУ, 2002. – 469 с.
4. Москаленко В. В. Электрический привод: Учеб. Пособие для студентов учреждений сред. проф. Образования. – М.: Мастерство; Высшая школа, 2001. – 368 с.