Аннотация
Описан оптимизированный алгоритм контроля условного угла наклона сенсора, на основе которого разработана усовершенствованная подсистема стабилизации и маневрирования мобильного балансирующего робота. Приведены результаты экспериментальных исследований.
Ключевые слова:
фильтр Калмана, балансирующий робот, алгоритм стабилизации, оптимизация.
Текст статьи
С развитием робототехники все большую популярность приобретают балансирующие роботы [1], которые используются в таких устройствах, как скутеры для прогулок, роботы-экскурсоводы, домашние роботы-помощники и роботы-ассистенты. Основными производителями подобных роботов, стоимость которых достаточно высока, являются фирмы Segway, Lego, Toyota. Хотя существует большое количество алгоритмов и устройств для балансирующих роботов [1-3], каждый из них по-своему уникален [1] и требует мощных вычислительных процессоров и высокоточных сенсоров. Это, в свою очередь, ограничивает сферу использования подобных устройств и увеличивает их цену. Один из основных параметров балансирующего робота – условный угол наклона робота. Цель данного исследования разработка универсального алгоритма, который смог бы объединить большое количество основных технических решений по контролю данного угла и стабилизации балансирующего робота.
В процессе функционирования мобильного балансирующего робота (рис. 1), модуль управления и обработки информации Management module and data processing
опрашивает модуль балансировки Balancing module
, затем данные обрабатываются и передаются драйверу двигателей Motor driver
, а также, через последовательный порт Serial port
, – отдельному устройству для мониторинга. Драйвер Motor driver
двигателей получает управляющие сигналы в виде цифровых сигналов 0 или 1 по четырем сигнальным линиям.
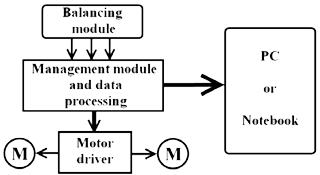
Рисунок 1 – Структура подсистемы стабилизации и маневрирования мобильного балансирующего робота
Модуль управления и обработки информации Management module and data processing
вначале проводит тестовый опрос сенсора калибровка
по трем осям (X, Y, Z) и запоминает эталонные значения калибровки, а далее – в цикле выполняются операции опроса. Для создания возможности точной обработки данных предложено в состав модуля ввести фильтр Калмана [5] с реализацией дополнительной процедуры, содержащей следующие операции: опрос сенсора по оси Х с последующим его запоминанием; задержка в 10 мс с последующим повторным опросом. Заметим, что такая процедура выполняется 5 раз с последующим усреднением результата. После завершения опроса по оси Х аналогично опрашивается ось Y и ось Z. Далее управление передается рабочему блоку постоянного цикла опроса сенсора с задержкой 2 мс и выполняется повторная фильтрация Калмана [4, 5].
Проведены экспериментальные исследования условного угла наклона сенсора без фильтрации и с использование фильтрации Калмана, в ходе которых разработанной системой было считано, в со- ответствии с рекомендациями [6], 300 показаний сенсора по трем осям, причем сенсор находился в состоянии спокойствия. Результаты экспериментальных исследований отображены на рис. 2. Здесь видно, что использование фильтрации Калмана, увеличивает точность обработки, примерно в 3 раза.
Во второй части экспериментальных исследований было оценено быстродействие для 300 показаний (см. рис. 2, а). Следует отметить, что в связи с применением временных задержек и увеличением количества операций, обусловленных применением фильтра Калмана, может уменьшиться быстродействие. Поэтому предложено оптимизировать алгоритм следующим образом: калибровка сенсора (проводится один раз в начале работы алгоритма); опрос сенсора по осям X, Y и Z; запоминание условных значений угла; выполнение задержки; повторный опрос сенсора. В результате уменьшается в 2,9 раза количество задержек, а соответственно, и время обработки, в частности с 15055 до 5275 мкс для 300 значений.
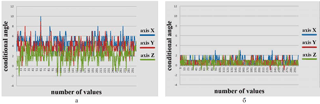
Рисунок 2 – Зависимость условного угла наклона: а – без фильтрации; б – с использованием фильтра Калмана
Предложенный алгоритм может использоваться не только при изготовлении дорогих устройств, к примеру, скутеров Segway, но и при создании сравнительно дешевых проектов, таких как роботы-помощники, роботы-экскурсоводы и т. п.
Таким образом, предложенный в работе оптимизированный алгоритм и усовершенствованная подсистема стабилизации и маневрирования мобильного балансирующего робота позволит увеличить точность обработки примерно в 3 раза с незначительным уменьшением быстродействия, а также сократить время обработки в 2,9 раза.
В будущем имеет смысл исследовать алгоритм на цифровых сенсорах ускорения, с возможностью поиска препятствий, улучшенной навигацией и записью маршрутов движения.
Список использованных источников
1. James Kuffner Jr., Satoshi Kagami, Masayuki Inaba, Hirochika Inoue. Control Algorithm for Stable Walking of Biped Robots // Proceedings of Humanoids 2000: First RAS / IEEE Int’l Conf. on Humanoid Robots. – P. 1–4.
2. ІTP Sensor Workshop Wiki [Электронный ресурс]. Режим доступа: URL: itp.nyu.edu, свободный.
3. Shimo-Meguro, Meguro-ku // Freescale Semiconductor Japan Ltd. DataMMA7260QT 2008 – 1–12 pages.
4. Научная библиотека избранных естественно научных изданий научная-библиотека.рф [Электронный ресурс]. Режим доступа: URL: sernam.ru, свободный.
5. CMRoboBits: Creating an Intelligent AIBO Robot [Электронный ресурс]. Режим доступа: URL: www.cs.cmu.edu, свободный.
6. М. Ю. Овчинников, Е. А. Цветков. Проектирование имитатора геомагнитного поля в составе лабораторного стенда для отработки способов управления ориентацией микроспутников / Препринт ИПМ им. М.В. Келдыша РАН. – 2005. – № 55. – 29 с.